











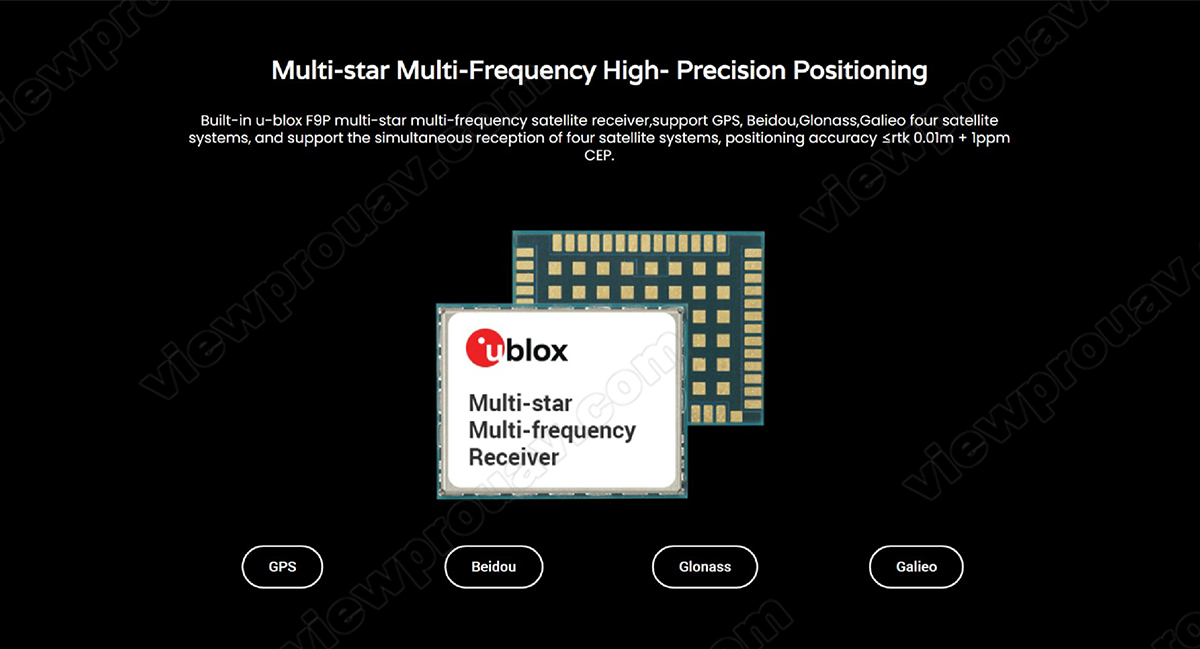










| RTK Receiver | ZED-F9P |
| Receiving channel | 184 |
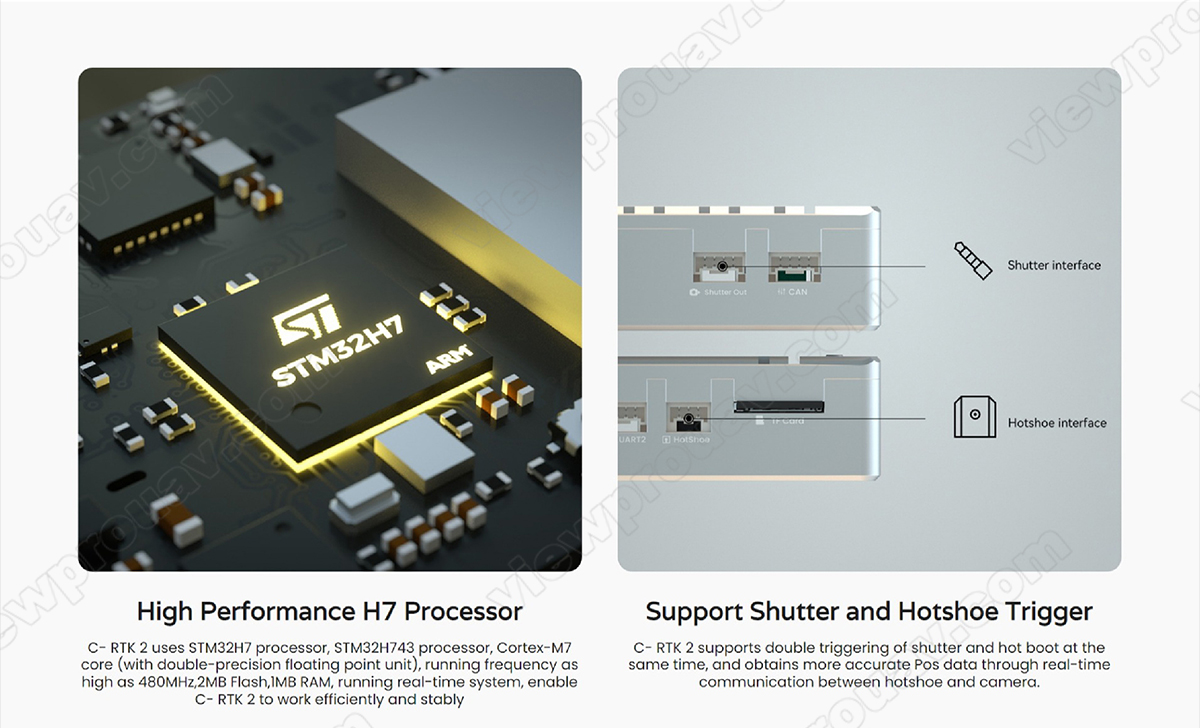
| المعالج | STM32H743VIH6 |
| Flash | 2M |
| Ram | 1M |
| Accelerometor | ICM-20689 |
| Gyroscope | ICM-20689 |
| Compass | RM3100 |
| Barometer | ICP10111 |
| TF Card | 32G(Max) |
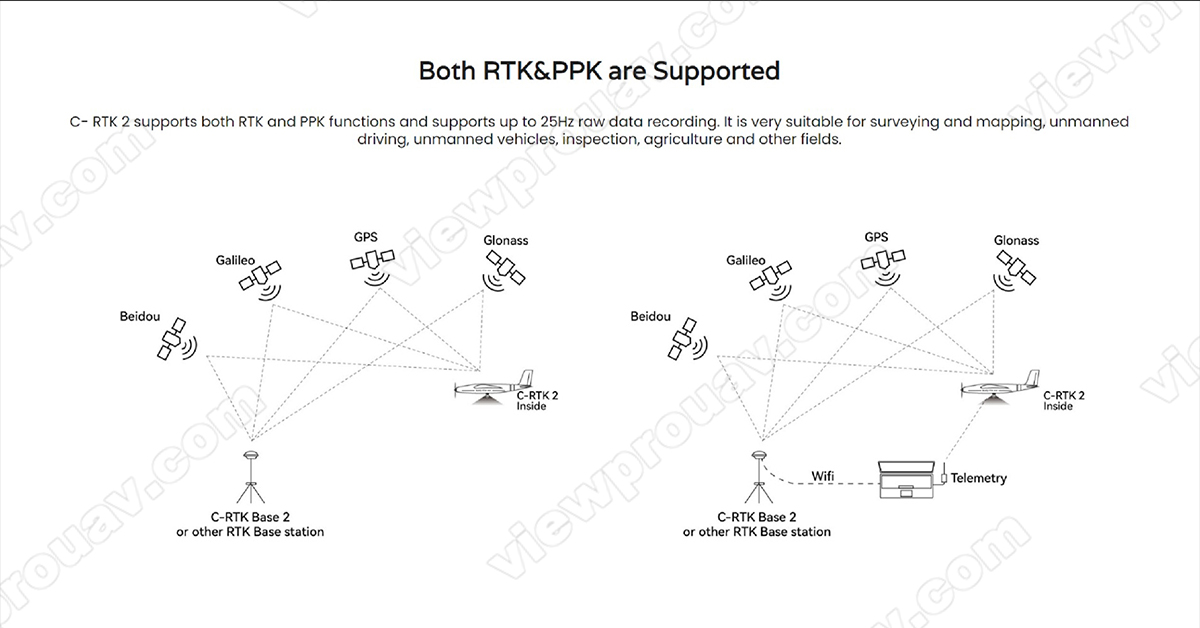
| PPK | Support |
| RTK | Support |
| GNSS system | GPS:L1C/A,L2C GLONASS:L1OF,L2OF Galieo:E1B/C,E5b Beidou:B1l,B2l |
| Enhanced system | QZSS:L1C/A,L2C,L1S SBAS:L1C/A |
| Concurrent GNSS | 4 |
| Nav Rate | RTK:20Hz(max) PPK:25HZ(max) default:5Hz |
| Convergence Time | RTK<10s |
| Accuracy(RMS) | RTK Level:0.01m+1ppm(RMS) RTK Vertical:0.02m+1ppm(RMS) GPS:1.5m(RMS) |
| Acquisition | Cold start:24s Hot start:1s Reacquisition:2s |
| Sensitivity | Tracking & Nav:-167dBm Cold starts:-148dBm Hot starts:-157dBm Reacquisitio:-160dBm |
| Anti-spoofng | Advanced anti-spoofng algorithms |
| Protocols | UAVCAN/NMEA/UBX(RAW)/RTCM3.3 |
| Time pulse | 0.25Hz~10Mhz(Configurable) |
| Anti-jamming | Active CW detection and removal Onboard band pass flter |
| Flight controller support | Compatible with flight controllers running ArduPilot/PX4 firmware |
| Coordinate system | WGS84 |
| الواجهة | |
| Hotshoe | 1 |
| Shutter in | 1 |
| Shutter out | 1 |
| Type C | 1(Hight speed USB) |
| F9P USB | 1 |
| F9P UART | 1 |
| CAN | 1 |
| Antenna interface Type | 1(mmcx) |
| درجة حرارة التشغيل | |
| جهد الإمداد | 4.5~6v |
| درجة حرارة التشغيل | -20~85℃ |
| الحجم | 56x33x16.5mm |
| الوزن | 39g |
| الوزن | 1 كيلوجرام |
|---|
كن أول من يقيم “C-RTK2 PPK/RTK High-precise Positioning Module for Mapping”
يجب عليك تسجيل الدخول لنشر مراجعة.
منتجات ذات صلة


المنسق المقيم والمحطة الأرضية
محطة أرضية VTX30 للطائرات بدون طيار VTX30 RC للتحكم عن بُعد في الطائرات والمحور
€0.00



وحدة التحكم في الطيران وGPS وRTK
أطقم مثبت الهوائي ثلاثي القوائم المعزز TS-2 للطائرات بدون طيار GCS
€599.00


المنسق المقيم والمحطة الأرضية
€0.00


وحدة التحكم في الطيران وGPS وRTK
طيار آلي عالي المستوى/التحكم في الطيران V7 Pro للطائرات بدون طيار USV UGV UGV
€0.00

وحدة التحكم في الطيران وGPS وRTK
VPS-381 PPK PPK جهاز استقبال GNSS المحمول جواً للمسح الجوي ورسم الخرائط RTK PPK 2 في 1
€2,780.00




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
المراجعات
لا توجد مراجعات بعد.