

























| معلمة الجهاز | |
| جهد العمل | 16V |
| جهد الإدخال | 4 ثوانٍ ~ 6 ثوانٍ (14.8 فولت ~ 25.2 فولت) |
| جهد الخرج | 5 فولت (توصيل مع PWM) |
| التيار الديناميكي | 1200~1700mA @ 16V |
| استهلاك الطاقة | Average 19.2W, Max 27.2W |
| درجة حرارة بيئة العمل المؤقتة. | -20℃ ~ +50℃ |
| المخرجات | Micro HDMI(1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264) |
| التخزين المحلي | TF card (Up to 256G,class 10, FAT32) |
| تنسيق تخزين الصور في بطاقة TF | JPG(1920*1080) |
| تنسيق تخزين الفيديو في بطاقة TF | MP4 (1080P 30 إطاراً في الثانية) |
| طريقة التحكم | pwm / ttl / s.bus / tcp / udp |
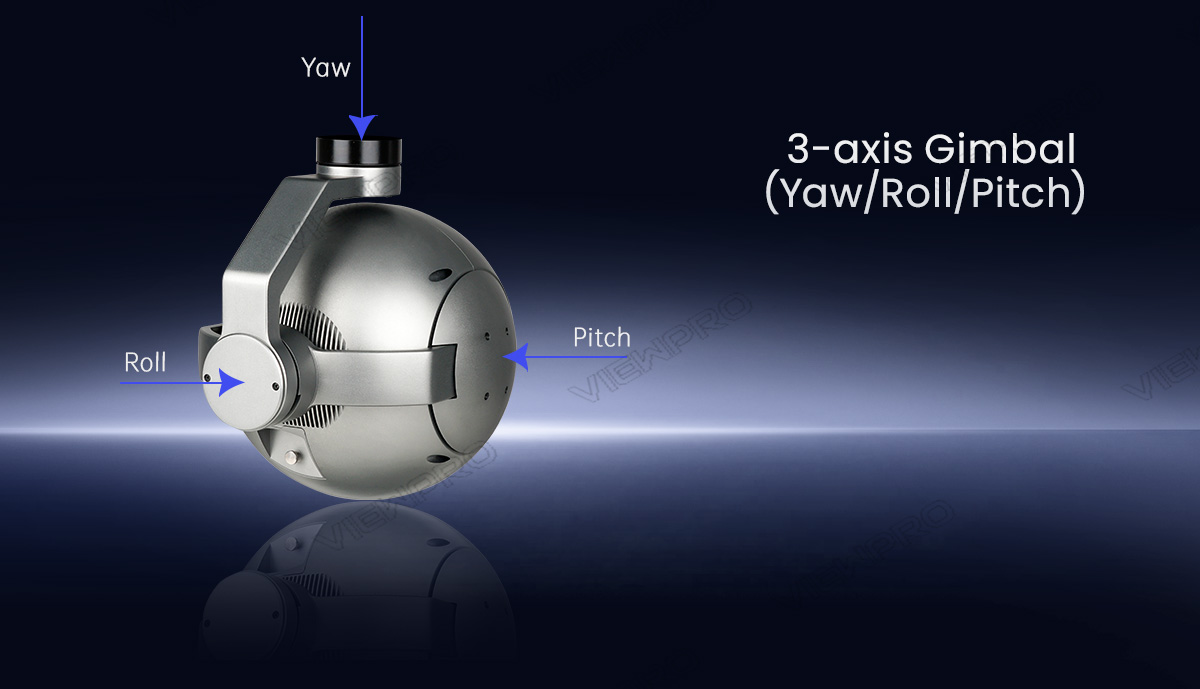
| مواصفات المحرك المحوري | |
| النطاق الميكانيكي | Pitch/Tilt: -60°(Up)~105°(Down), Roll: ±60°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| نطاق يمكن التحكم فيه | Pitch/Tilt: -45°~100°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| زاوية الاهتزاز | الانحراف/الدوران/الانعراج: ± 0.02 درجة |
| مفتاح واحد إلى المركز | √ |
| مواصفات كاميرا EO | |
| مستشعر التصوير | مستشعر STARVIS CMOS من نوع 1/1.8/1.8 |
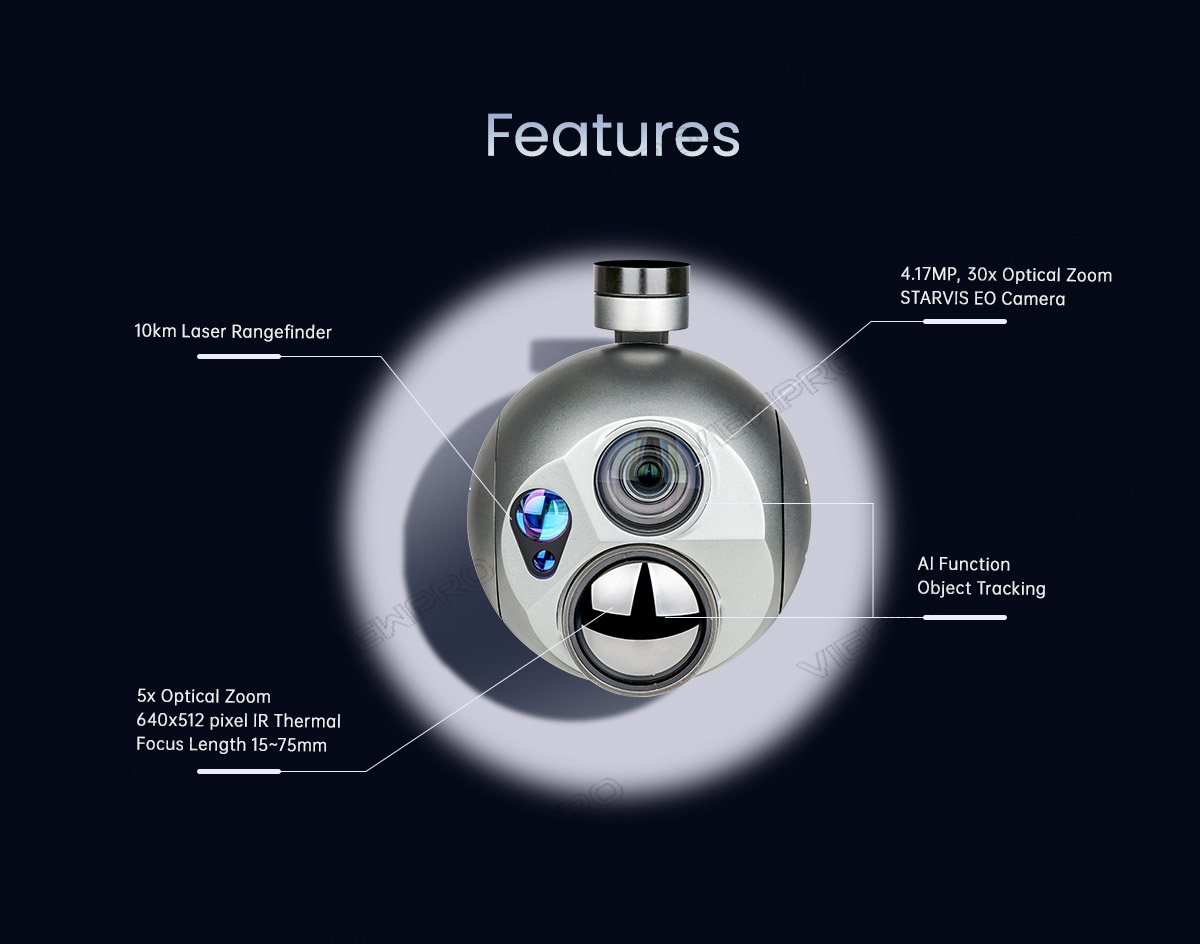
| جودة الصورة | 4.17 ميجابكسل |
| عدسة التكبير/التصغير البصري | 30 ضعفًا، f=6.5 ~ 162.5 مم، F1.6 إلى F4.8 |
| تقريب رقمي | 12 ضعفًا (432 ضعفًا كحد أقصى مع StableZoom) |
| الحد الأدنى لمسافة الجسم | 100 مم (طرف عريض)، 1200 مم (طرف مقرب) |
| زاوية الرؤية الأفقية | 58.1 درجة (طرف عريض) ~ 2.3 درجة (طرف مقرب) |
| الصورة S/N | 50 ديسيبل (الوزن في وضع التشغيل) |
| الحد الأدنى من الإضاءة | في حالة ICR-Off (القيمة النموذجية) 0.009 لكس (1/30 ثانية، 50%، تشغيل وضع الحساسية العالية) 0.09 لكس (1/30 ثانية، 50%، إيقاف تشغيل وضع الحساسية العالية) 0.0012 lx (1/4 ثانية، 1/3 ثانية، 50%، تشغيل وضع الحساسية العالية) 0.012 lx (1/4 ثانية، 1/3 ثانية، 50%، إيقاف تشغيل وضع الحساسية العالية) في حالة ICR-On 0.00008 لكسل (1/30 ثانية، 50%، تشغيل وضع الحساسية العالية) 0.00063 lx (1/30 ثانية، 50%، إيقاف تشغيل وضع الحساسية العالية) 0.000005 لكس (1/4 ثانية، 1/3 ثانية، 30%، تشغيل وضع الحساسية العالية) |
| وضع الحساسية العالية تشغيل/إيقاف التشغيل | إيقاف التشغيل |
| الإضاءة الموصى بها | 100 لوكس إلى 100,000 لوكس |
| المكاسب | تلقائي/يدوي (من 0 إلى 50.0 ديسيبل (من 0 إلى 28 خطوة)) الحد الأقصى. حد الكسب الأقصى (10.7 إلى 50.0 ديسيبل (6 إلى 28 خطوة)) |
| توازن اللون الأبيض | أوتوماتيكي، ATW، داخلي، خارجي، خارجي، خارجي بضغطة واحدة، WB، WB يدوي، خارجي أوتوماتيكي، مصباح بخار الصوديوم (ثابت/خارجي/أوتوماتيكي) |
| وضع النطاق الديناميكي العريض | تشغيل/إيقاف تشغيل |
| سرعة الغالق | 1/1 ثانية إلى 1/10000 ثانية (22 خطوة) |
| تشغيل/إيقاف تشغيل/تعويض الإضاءة الخلفية | إيقاف التشغيل |
| تشغيل/إيقاف/تشغيل/إيقاف/إيقاف تشغيل مثبت الصور | إيقاف التشغيل |
| تشغيل/إيقاف تشغيل ICR | إيقاف التشغيل |
| تقليل الضوضاء | تشغيل/إيقاف تشغيل |
| إزالة الضباب | تشغيل/إيقاف تشغيل (منخفض، متوسط، مرتفع) |
| مواصفات جهاز التصوير الحراري بالأشعة تحت الحمراء | |
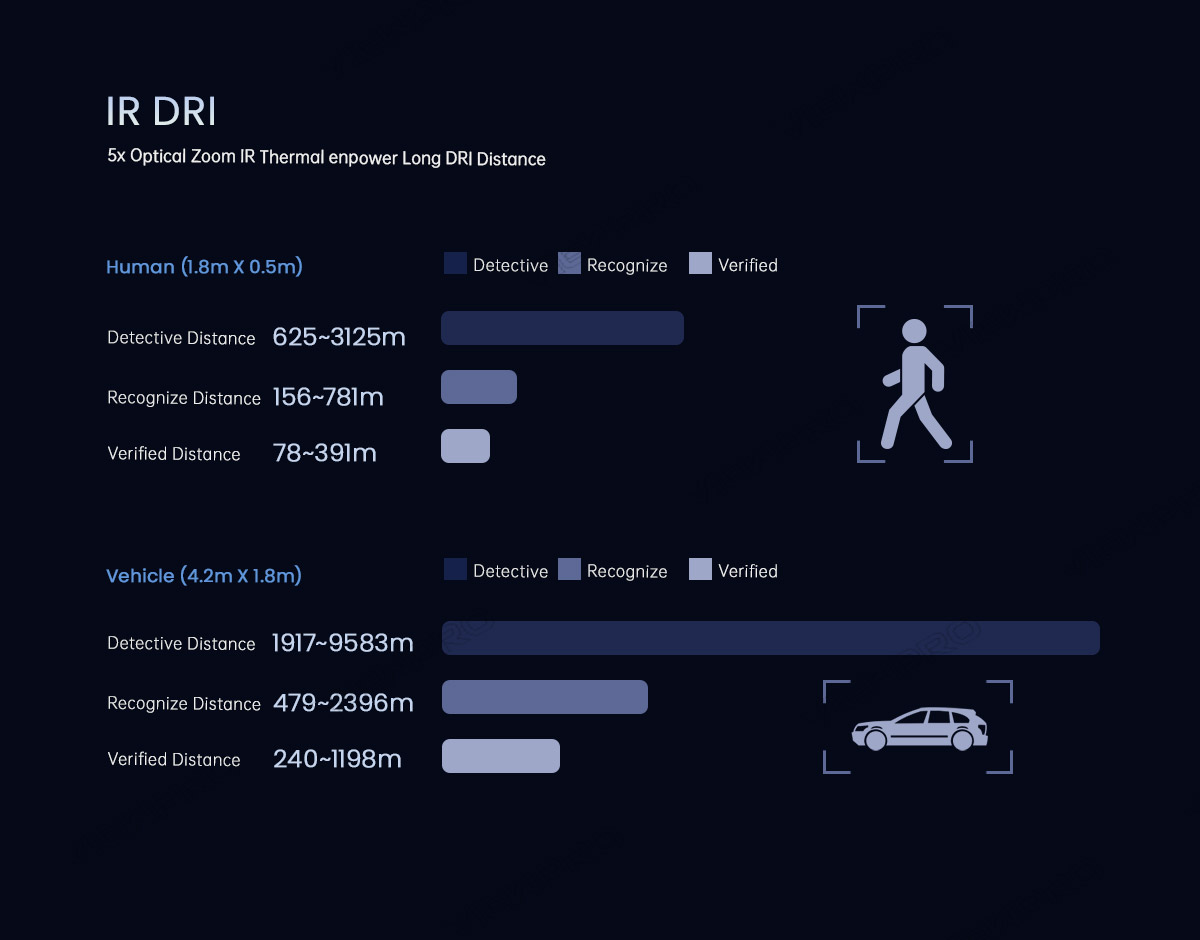
| طول التركيز | 15~75mm |
| optical zoom | 1x ~ 5x |
| مجال الرؤية الأفقية | 28.7°~5.86° |
| مجال الرؤية الرأسي | 23.1°~4.69° |
| 15~75mm Detective Distance (Man: 1.8×0.5m) | 625~3125 meters |
| 15~75mm Recognize Distance (Man: 1.8×0.5m) | 156~781 meters |
| 15~75mm Verified Distance (Man: 1.8×0.5m) | 78~391 meters |
| 15~75mm Detective Distance (Car: 4.2×1.8m) | 1917~9583 meters |
| 15~75mm Recognize Distance (Car: 4.2×1.8m) | 479~2396 meters |
| 15~75mm Verified Distance (Car: 4.2×1.8m) | 240~1198 meters |
| وضع العمل | جهاز تصوير حراري بموجة طويلة VOx غير مبرد (8 ميكرومتر إلى 14 ميكرومتر) |
| بكسل الكاشف | 640*512 |
| درجة البكسل | 12 ميكرومتر |
| طريقة التركيز | العدسة الأساسية الأثيرية |
| NETD | ≤40mK@25 ℃،F #1.0 |
| لوحة الألوان | white hot, black hot, Iron Red |
| تتبع الأجسام بكاميرا EO/كاميرا الأشعة تحت الحمراء | |
| معدل تحديث بكسل الانحراف | 30 هرتز |
| تأخير إخراج بكسل الانحراف | <أقل من 30 مللي ثانية |
| الحد الأدنى من تباين الأجسام | 5% |
| SNR | 4 |
| الحد الأدنى لحجم الجسم | 16*16 بكسل |
| الحد الأقصى لحجم الجسم | 256*256 بكسل |
| سرعة التتبع | ±48 بكسل/إطار ± 48 |
| وقت ذاكرة الكائن | 100 إطار |
| أداء الذكاء الاصطناعي لكاميرا EO Camera AI | |
| نوع الأهداف | السيارة والإنسان |
| كمية الكشف المتزامن | ≥ 10 أهداف |
| الحد الأدنى لنسبة التباين | 5% |
| الحد الأدنى لحجم الهدف | 5×5 بكسل |
| معدل اكتشاف السيارات | ≥85% |
| معدل الإنذار الكاذب | ≤10% |
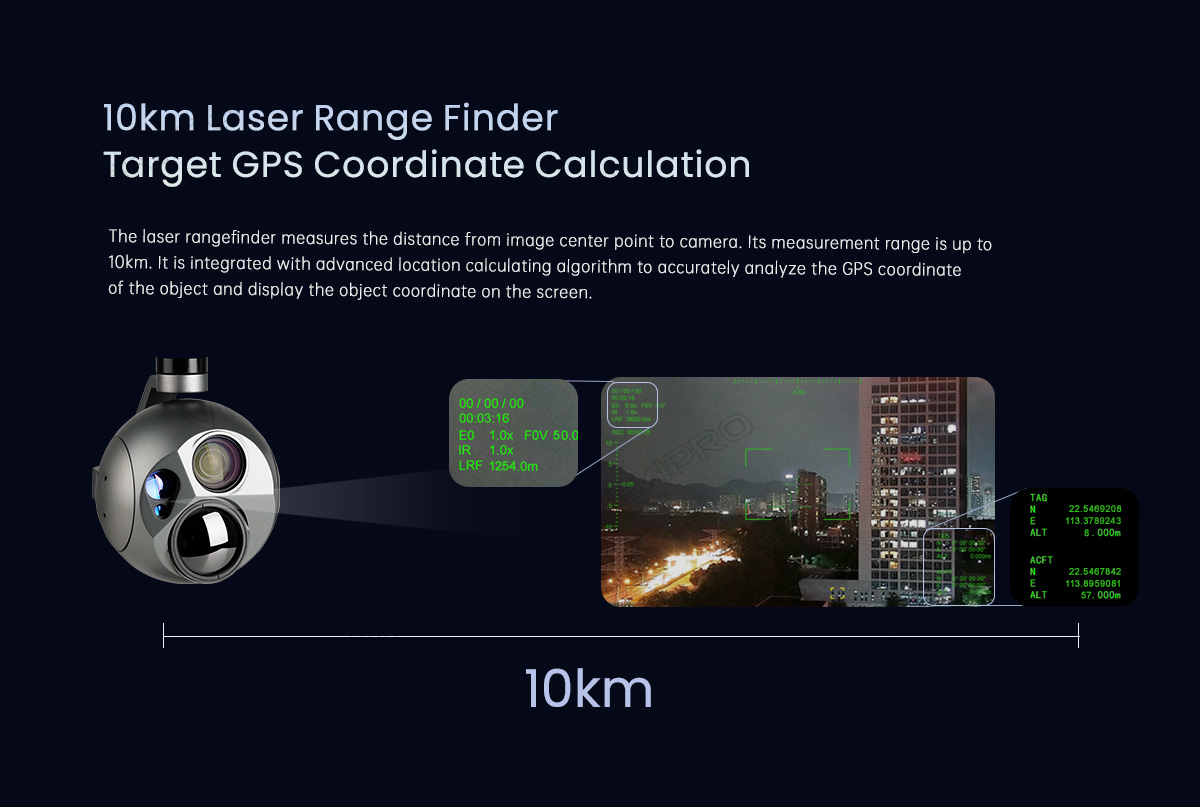
| جهاز تحديد المدى بالليزر بالأشعة تحت الحمراء | |
| النطاق | 10 كم للهدف الكبير (مثل المبنى) ≥ 6 كم للسيارة (2.3م × 2.3م) ≥ 2.5 كم للأشخاص (1.75 م × 0.75 م) (بناءً على القيمة النموذجية: |
| الدقة | ≤2م2م (RMS) |
| الشعاع الضوئي | ليزر نبضي 1535 ± 5 نانومتر |
| زاوية التباين | ≤0.5مراد |
| تردد نبضة الليزر | 1 ~ 10 هرتز |
| الحد الأدنى لنطاق القياس | ≤30m |
| حل الموقع | خط العرض وخط الطول للهدف |
| جهاز تحديد المدى | قياس المسافة بين الجسم في مركز الشاشة وجهاز تحديد المدى بالليزر |
| الميزات | |
| قسم دعم العمليات | عرض زاوية الانعراج وزاوية الانحراف والميل، والتكبير، وقيمة المدى، ومدة تسجيل البطاقة، ونظام تحديد المواقع والارتفاع للطائرة، ونظام تحديد المواقع والارتفاع لنقطة تحديد المواقع والارتفاع المستهدفة، والتاريخ والوقت |
| وضع العلامات الجغرافية | عرض الوقت وإحداثيات نظام تحديد المواقع العالمي (GPS) في الصورة exif |
| قراءة البطاقات عبر الإنترنت | HTTP قراءة الصور أو مقاطع الفيديو |
| KLV (UDP) | تسجيل البطاقة أو تشغيل فيديو Viewlink |
| ArduPilot / PX4 | الدعم (بروتوكول Mavlink) Optional: Support Ardupilot Follow me feature |
| تبديل الفيديو | إيو+إير+إير/إير+إيو/إيو/إير |
| إخراج دفق فيديو مزدوج (اختياري) | دعم (إخراج دفقين من EO و IR، ملاحظات: يتعذر التسجيل بمجرد تنشيط إخراج دفق الفيديو الدولالي) |
| معلومات التعبئة والتغليف | |
| ن.و | 2582±50g(Viewport version with Viewport) |
| قياس المنتج. | 200*175*258mm(Viewport version with Viewport) |
| الإكسسوارات | 1pc gimbal camera device, screws, aluminum cylinders, damping balls, damping boards, 1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| الوزن | 1 كيلوجرام |
|---|
كن أول من يقيم “A30TR-1575 5x Optical zoom IR Thermal 30x Optical zoom Starlight EO camera Triple Sensors Al Object Tracking and 10KM LRF Gimbal Camera”
يجب عليك تسجيل الدخول لنشر مراجعة.
منتجات ذات صلة


المحركات ذات المحورين والحمولة
€12,999.00


المحركات ذات المحورين والحمولة
€14,999.00


المحركات ذات المحورين والحمولة
سلسلة Hawkeye U818 سلسلة كاميرا التتبع ذات العدسة الرئيسية الدقيقة ذات المستشعر المزدوج للمراقبة
€0.00


المحركات ذات المحورين والحمولة
كاميرا QIR50T 50 مم ذات المحورين الحراري للطائرة بدون طيار QIR50T
€0.00




المحركات ذات المحورين والحمولة
برنامج ZIR1352T احترافي ثلاثي المحاور عالي الدقة مع كاميرا تكبير حرارية مزدوجة عالية الدقة
€12,799.00


المحركات ذات المحورين والحمولة
كاميرا U7DER / U7DE Micro Prime Lens Dual EO/IR Gimbal Gimbal لتتبع الأجسام للمراقبة
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
المحركات ذات المحورين والحمولة
€0.00
المراجعات
لا توجد مراجعات بعد.