


















| معلمة الجهاز | |
| جهد العمل | 16V |
| جهد الإدخال | 4 ثوانٍ ~ 6 ثوانٍ (14.8 فولت ~ 25.2 فولت) |
| التيار الديناميكي | 530~1000mA @ 16V |
| استهلاك الطاقة | 8.5W ~ 16W |
| درجة حرارة بيئة العمل المؤقتة. | -20℃ ~ +60℃ |
| IP Rate | IP43 |
| المخرجات | IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| التخزين المحلي | بطاقة SD (حتى 256 جيجابايت، فئة 10، FAT32) |
| تنسيق تخزين الصور في بطاقة TF | JPG(1920*1080) |
| تنسيق تخزين الفيديو في بطاقة TF | MP4 (1080P 30 إطاراً في الثانية) |
| طريقة التحكم | TTL or S.BUS (choose one of them, and TTL by default), and TCP/UDP |
| مواصفات المحرك المحوري | |
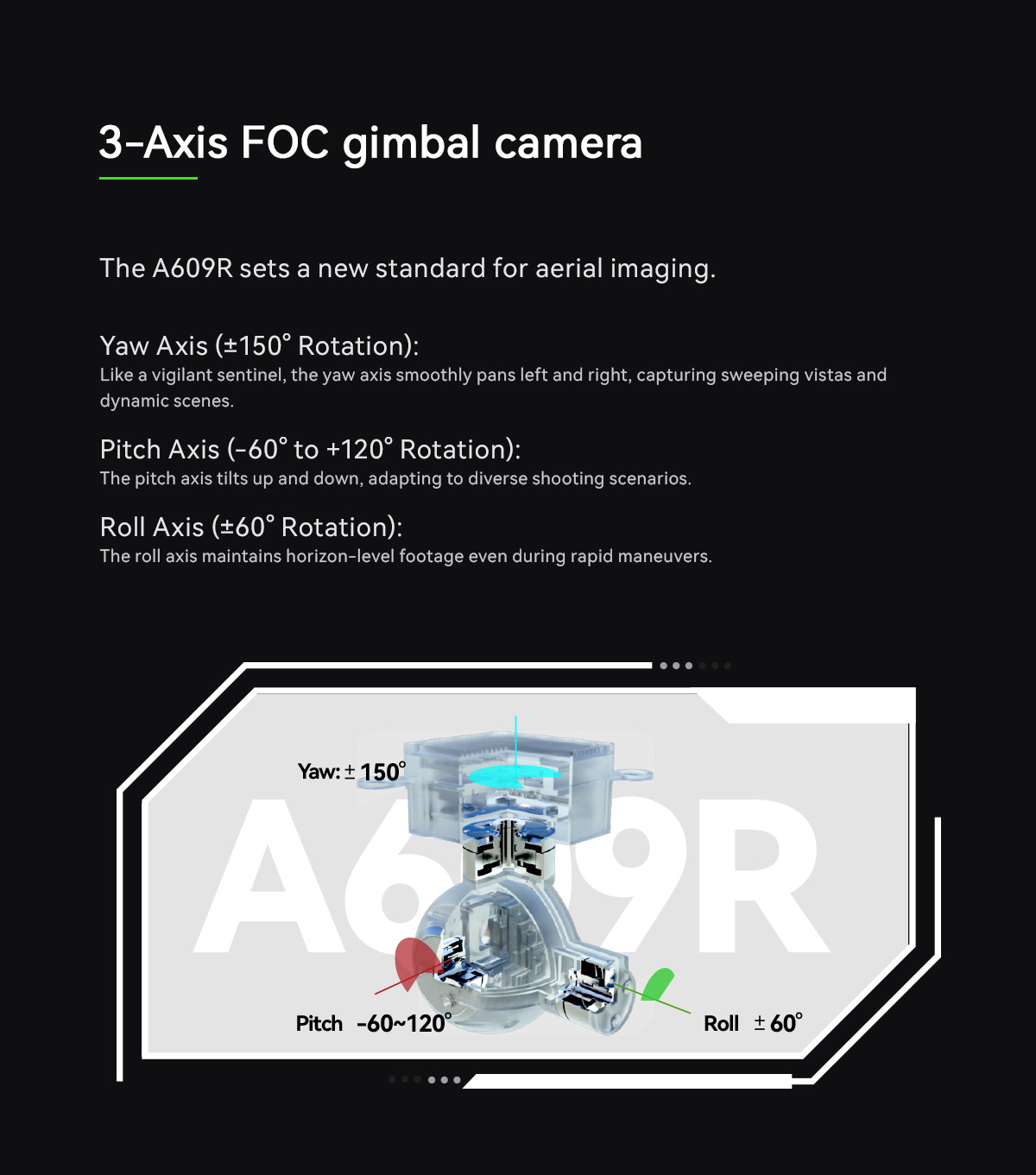
| النطاق الميكانيكي | Pitch/Tilt: -45°~130°, Roll: ±60°, Yaw/Pan: ±150° |
| نطاق يمكن التحكم فيه | Pitch/Tilt: -40°~125°, Yaw/Pan: ±145° |
| زاوية الاهتزاز | الانحراف/الدوران/الانعراج: ± 0.02 درجة |
| مفتاح واحد إلى المركز | √ |
| مواصفات كاميرا EO | |
| مستشعر التصوير | 1/2.9″ CMOS Sensor |
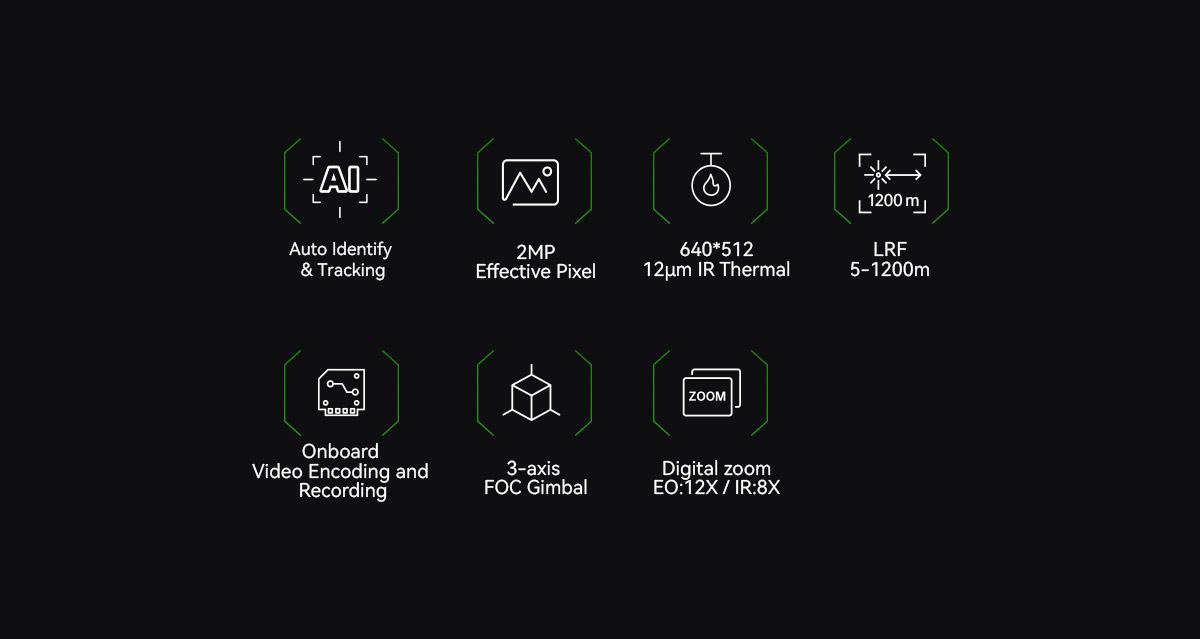
| Image pixel | 2MP |
| جودة الصورة | الوضوح العالي الكامل 1080 (1920*1080) |
| طول التركيز | 6mm |
| تقريب رقمي | 1x~12x |
| Angle of View (D,H,V) | FOV:D 60° H 50° V 28° |
| مواصفات جهاز التصوير الحراري بالأشعة تحت الحمراء | |
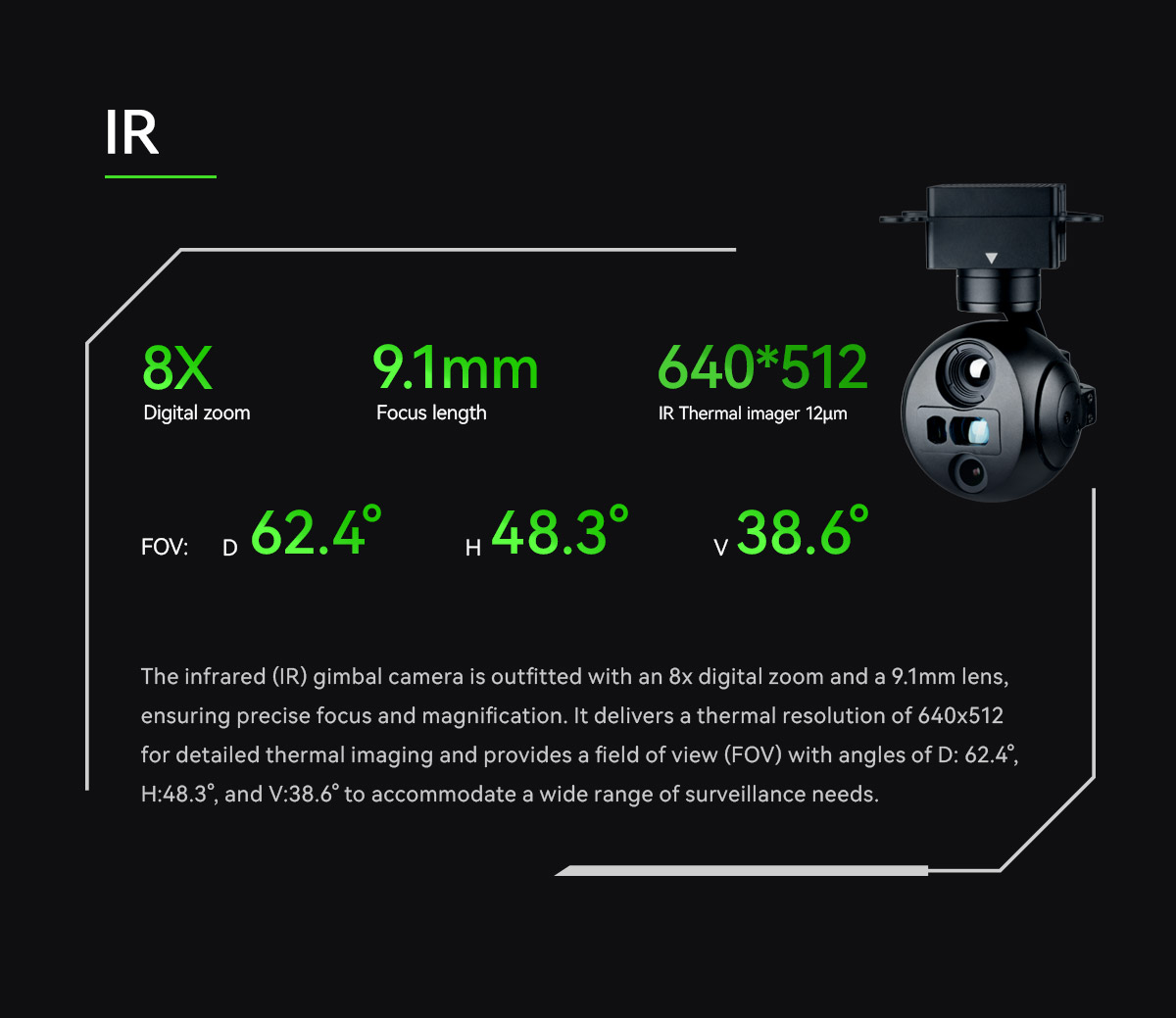
| طول التركيز | 9.1mm |
| مجال الرؤية الأفقية | 48.3° |
| مجال الرؤية الرأسي | 38.6° |
| مجال الرؤية القطرية | 62.4° |
| وضع العمل | جهاز تصوير حراري بموجة طويلة VOx غير مبرد (8 ميكرومتر إلى 14 ميكرومتر) |
| بكسل الكاشف | 640*512 |
| حجم البكسل | 12 ميكرومتر |
| تقريب رقمي | 1x~8x |
| طريقة التركيز | العدسة الأساسية الأثيرية |
| NETD | ≤40mK (@25℃,@F1.0) |
| لوحة الألوان | White,black,pseudo color |
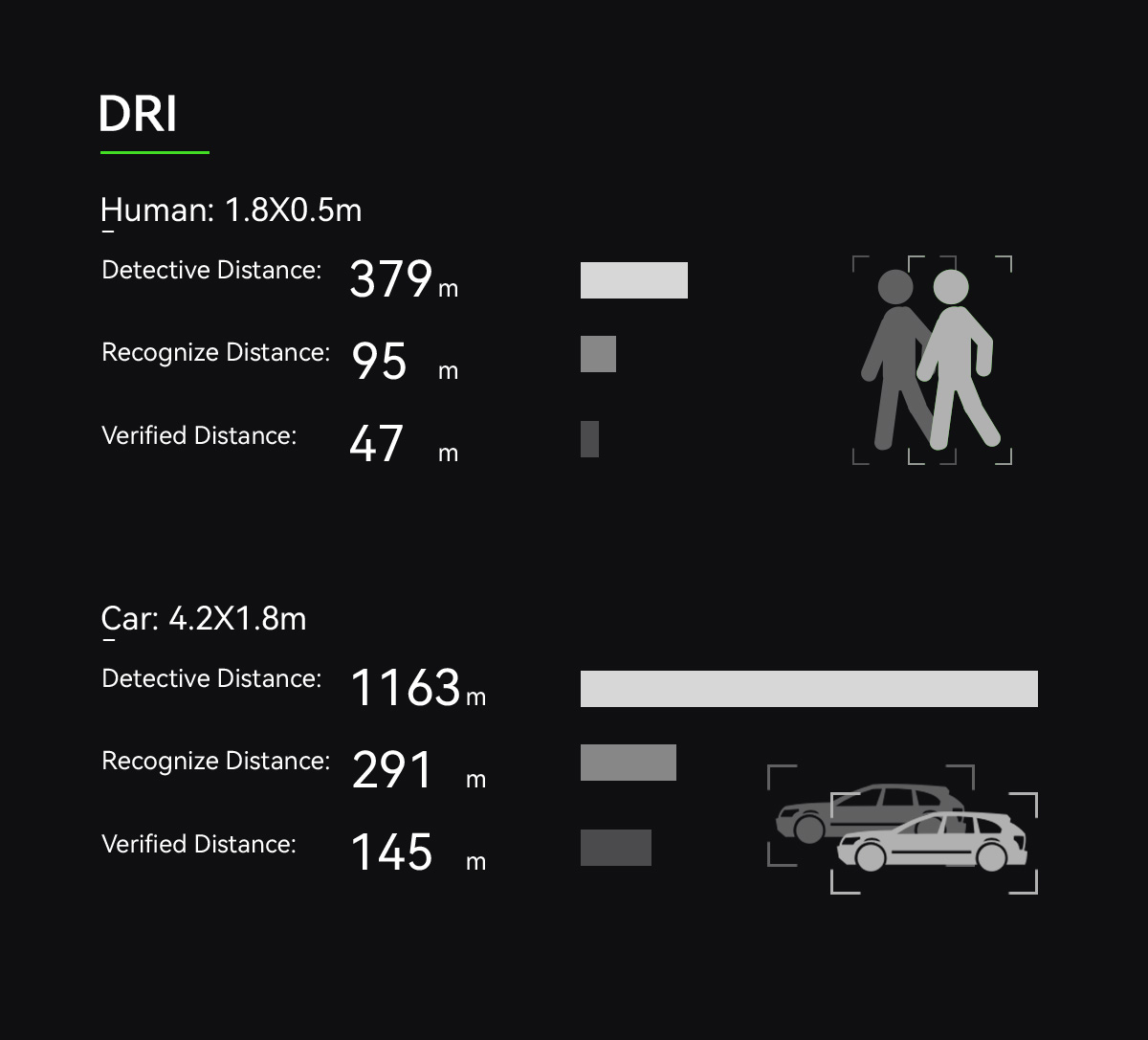
| مسافة المحقق (رجل: 1.8 × 0.5 متر) | 379 meters |
| التعرف على المسافة (رجل: 1.8 × 0.5 متر) | 95 meters |
| المسافة التي تم التحقق منها (رجل: 1.8 × 0.5 م) | 47 meters |
| مسافة المحقق (السيارة: 4.2 × 1.8 م) | 1163 meters |
| التعرف على المسافة (السيارة: 4.2 × 1.8 م) | 291 meters |
| المسافة التي تم التحقق منها (السيارة: 4.2 × 1.8 م) | 145 meters |
| Radiometric function(Optional) | Support full-screen temperature data output |
| Optional range(-20℃~+150℃, +100℃~+550℃) | |
| ±2℃ or ±2% of the reading (whichever is greater). | |
| تتبع الأجسام بكاميرا EO/كاميرا الأشعة تحت الحمراء | |
| معدل تحديث بكسل الانحراف | 30 هرتز |
| تأخير إخراج بكسل الانحراف | <أقل من 30 مللي ثانية |
| الحد الأدنى من تباين الأجسام | 5% |
| SNR | 4 |
| الحد الأدنى لحجم الجسم | 16*16 بكسل |
| الحد الأقصى لحجم الجسم | 256*256 بكسل |
| سرعة التتبع | ±48 بكسل/إطار ± 48 |
| وقت ذاكرة الكائن | 100 إطار |
| EO/IR Camera AI Performance | |
| نوع الأهداف | السيارة والإنسان |
| كمية الكشف المتزامن | ≥ 10 أهداف |
| الحد الأدنى لنسبة التباين | 5% |
| الحد الأدنى لحجم الهدف | 5×5 بكسل |
| معدل اكتشاف السيارات | ≥85% |
| معدل الإنذار الكاذب | ≤10% |
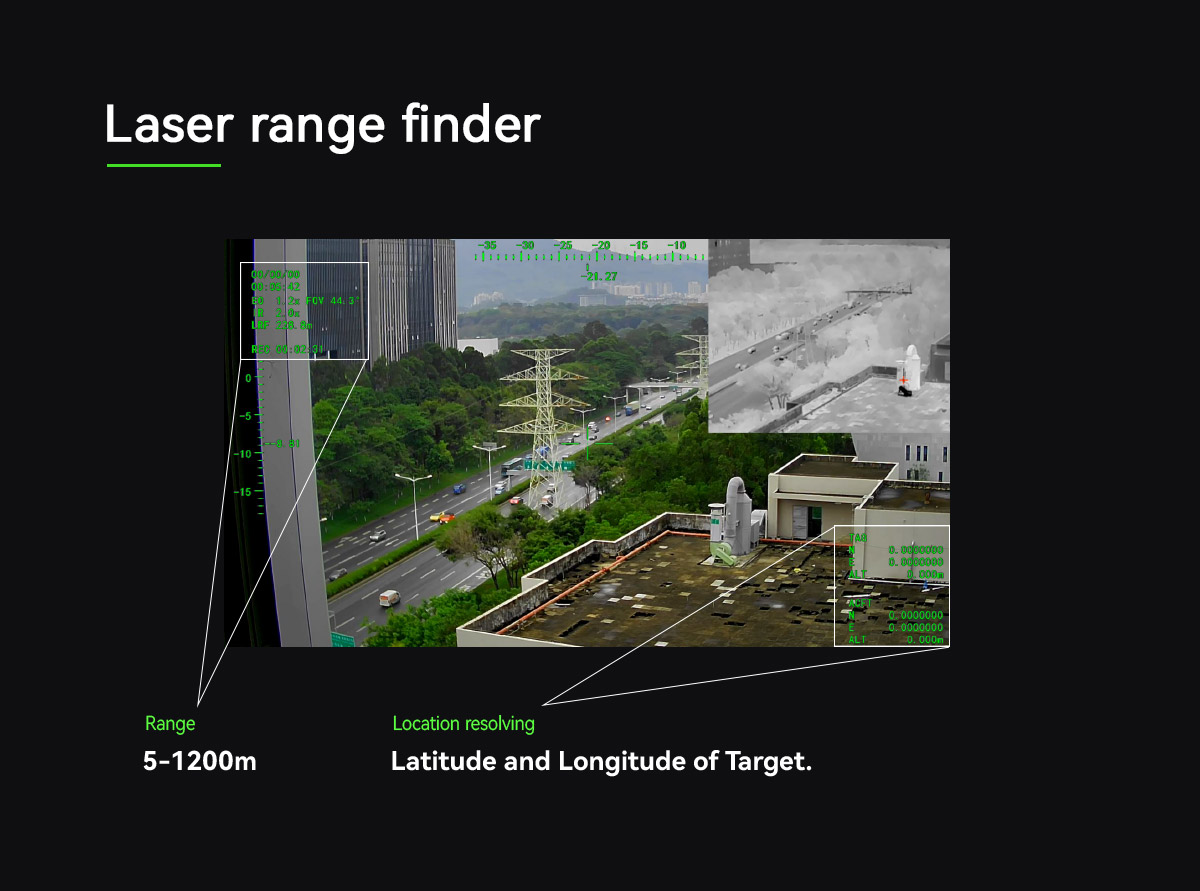
| جهاز تحديد المدى بالليزر بالأشعة تحت الحمراء | |
| النطاق | 5~1200 meters |
| الدقة | 1m |
| الشعاع الضوئي | ليزر نبضي 905 نانومتر |
| زاوية التباين | ~6 mrad |
| تردد نبضة الليزر | 1~4Hz |
| حل الموقع | خط العرض وخط الطول للهدف |
| جهاز تحديد المدى | قياس المسافة بين الجسم في مركز الشاشة وجهاز تحديد المدى بالليزر |
| الميزات | |
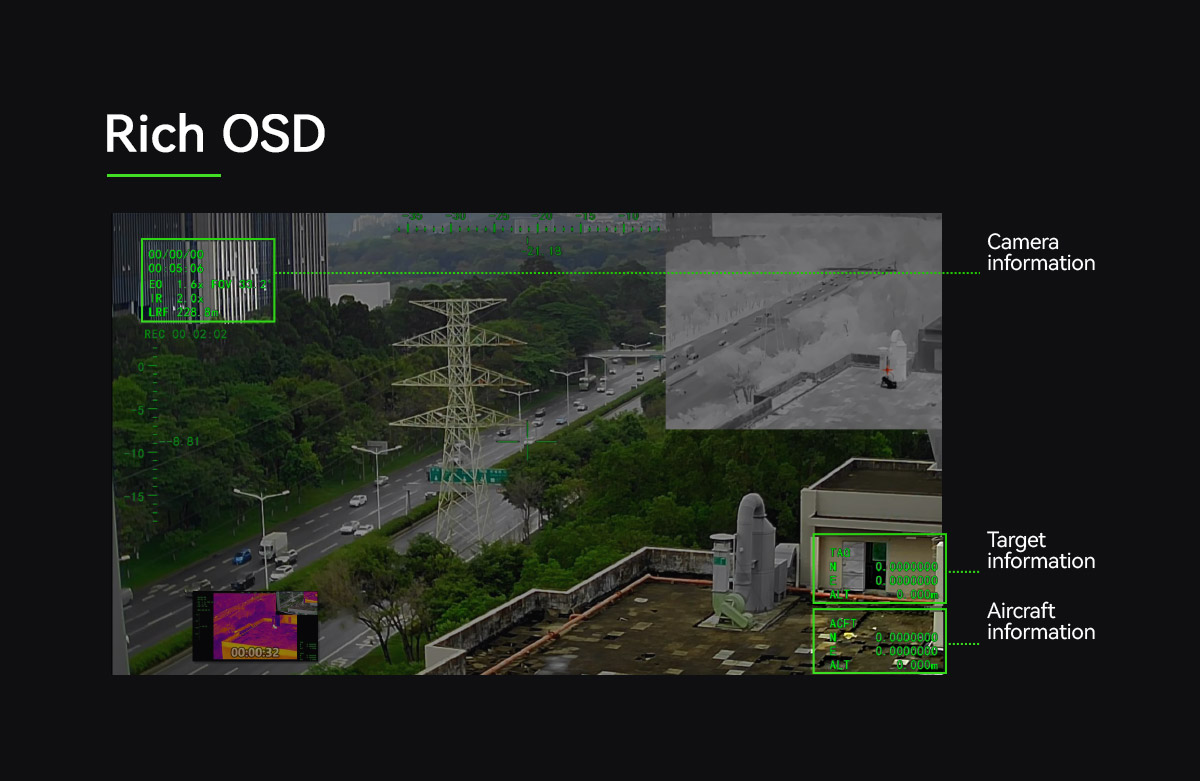
| قسم دعم العمليات | Display the gimbal’s yaw and pitch angle, magnification, ranging value, card recording duration, aircraft GPS and altitude, target ranging point GPS and altitude, date and time |
| وضع العلامات الجغرافية | عرض الوقت وإحداثيات نظام تحديد المواقع العالمي (GPS) في الصورة exif |
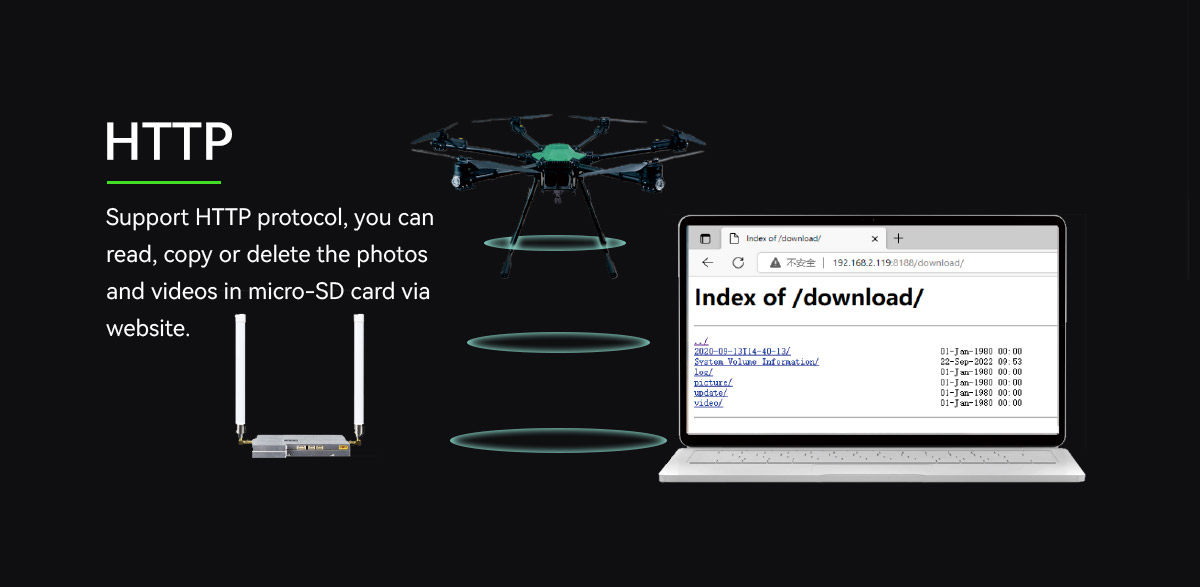
| قراءة البطاقات عبر الإنترنت | HTTP قراءة الصور أو مقاطع الفيديو |
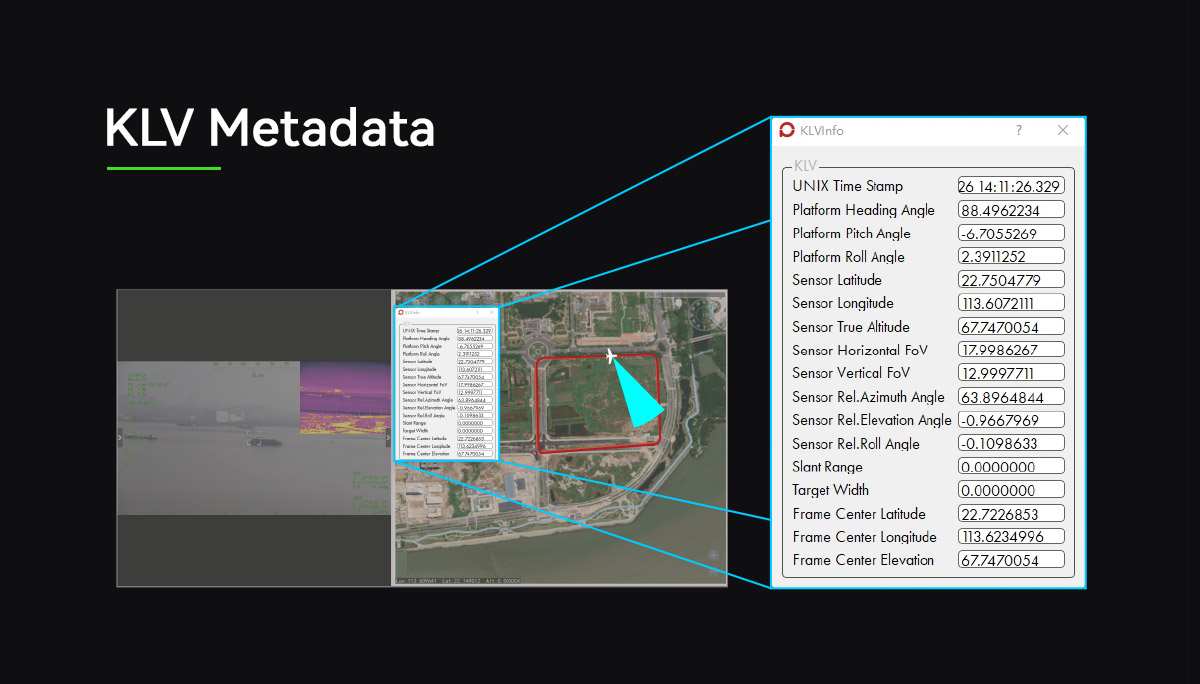
| KLV (UDP) | تسجيل البطاقة أو تشغيل فيديو Viewlink |
| ArduPilot / PX4 | الدعم (بروتوكول Mavlink) اختياري: دعم ميزة Ardupilot اتبعني |
| خياطة الفيديو | إيو+إير+إير/إير+إيو/إيو/إير |
| إخراج دفق فيديو مزدوج (اختياري) | دعم (إخراج دفقين من EO و IR، ملاحظات: يتعذر التسجيل بمجرد تنشيط إخراج دفق الفيديو الدولالي) |
| معلومات التعبئة والتغليف | |
| ن.و | 235±10g |
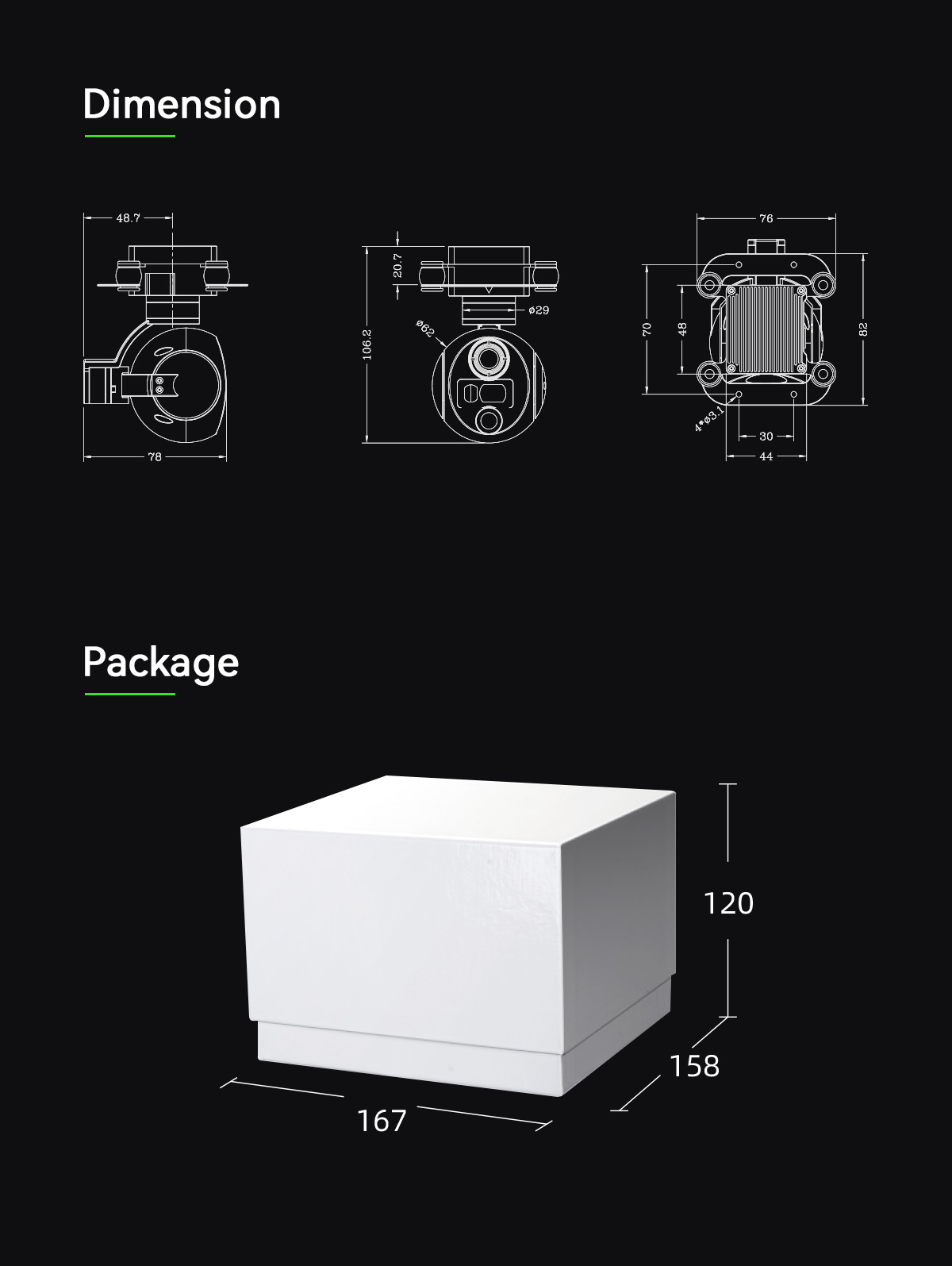
| قياس المنتج. | 78*62*106.2mm |
| الإكسسوارات | screws, USB to TTL cable,power cable,Multi-function cable,Ethernet cable, Hight quality box with foam cushion |
| الوزن | 1 كيلوجرام |
|---|
كن أول من يقيم “A609R Ultra-Compact Triple-Sensor 3-Axis EO/IR & LRF Gimbal Camera”
يجب عليك تسجيل الدخول لنشر مراجعة.
منتجات ذات صلة


المحركات ذات المحورين والحمولة
سلسلة Hawkeye U818 سلسلة كاميرا التتبع ذات العدسة الرئيسية الدقيقة ذات المستشعر المزدوج للمراقبة
€0.00


رسم الخرائط والمساحة
€6,199.00


المحركات ذات المحورين والحمولة
€4,499.00


المحركات ذات المحورين والحمولة
€0.00






المحركات ذات المحورين والحمولة
€8,999.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
المحركات ذات المحورين والحمولة
برنامج ZIR1352T احترافي ثلاثي المحاور عالي الدقة مع كاميرا تكبير حرارية مزدوجة عالية الدقة
€12,799.00
المراجعات
لا توجد مراجعات بعد.