






















| معلمة الجهاز | |
| جهد العمل | 16V |
| جهد الإدخال | 4S ~ 6S |
| جهد الخرج | 5 فولت (توصيل مع PWM) |
| التيار الديناميكي | 310mA~1600mA @ 16V |
| درجة حرارة بيئة العمل المؤقتة. | -20℃ ~ +60℃ |
| IP rating | IP44 |
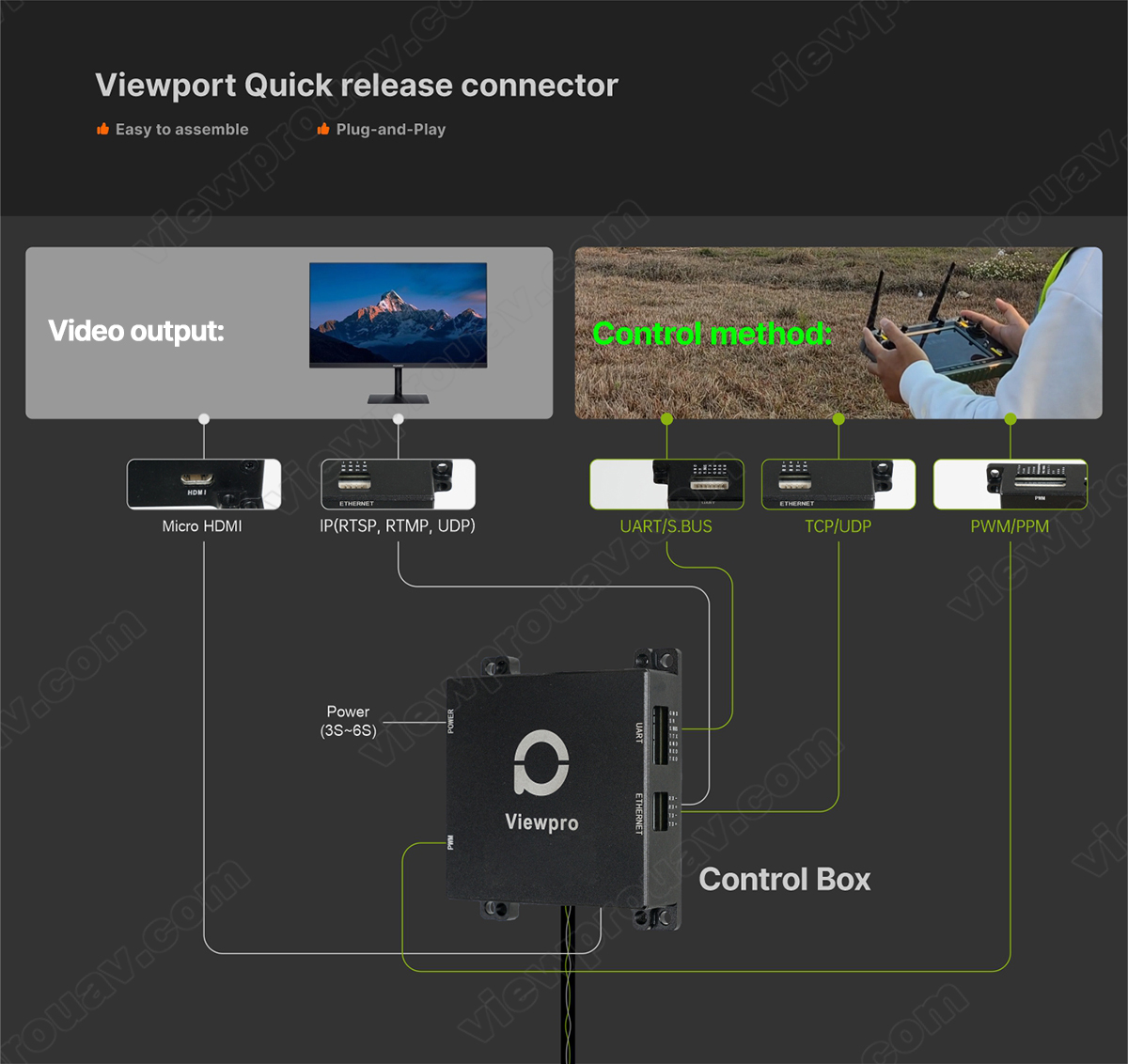
| المخرجات | ميكرو HDMI (1080P 30 إطارًا في الثانية/60 إطارًا في الثانية) / IP (RTSP/UDP 720p/1080p 30 إطارًا في الثانية) |
| التخزين المحلي | بطاقة TF (حتى 128 جيجابايت، فئة 10، بتنسيق FAT32 أو FAT سابقًا) |
| تنسيق تخزين الصور | JPG(1920*1080) |
| تنسيق تخزين الفيديو | MP4 (1080P 30 إطاراً في الثانية) |
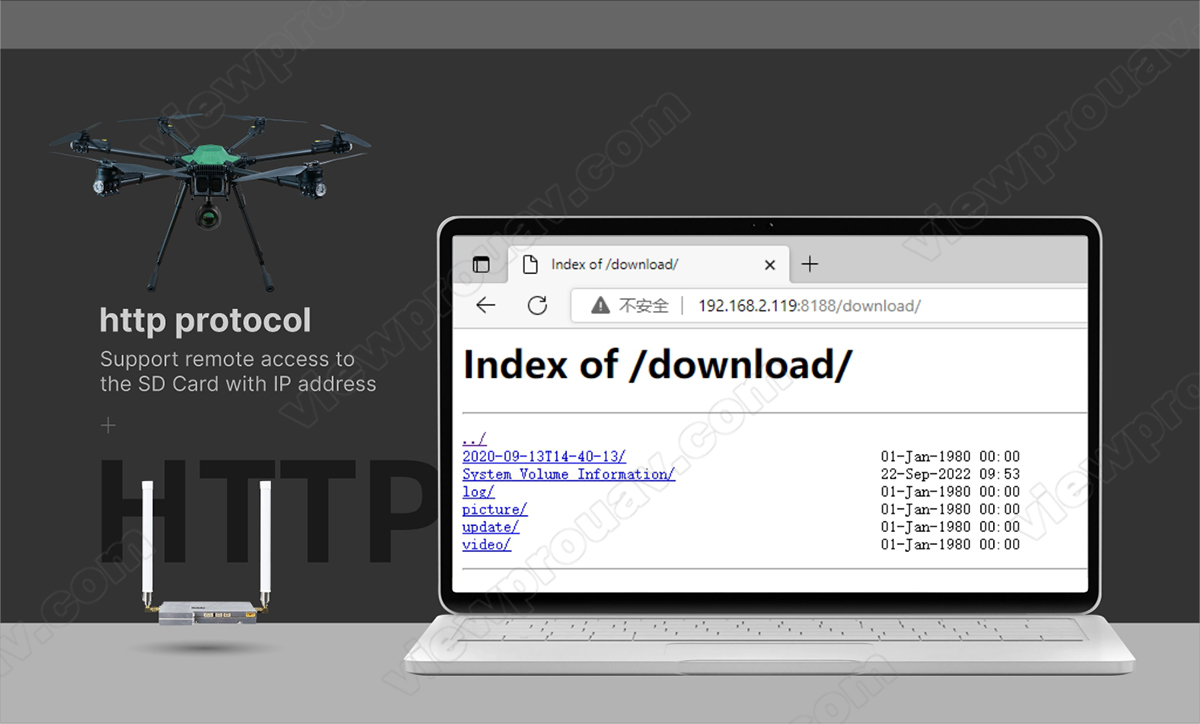
| قراءة البطاقات عبر الإنترنت | قراءة صور قراءة HTTP |
| طريقة التحكم | PWM / TTLTL / S.BUS / TCP (إخراج IP)/UDP (إصدار إخراج IP) |
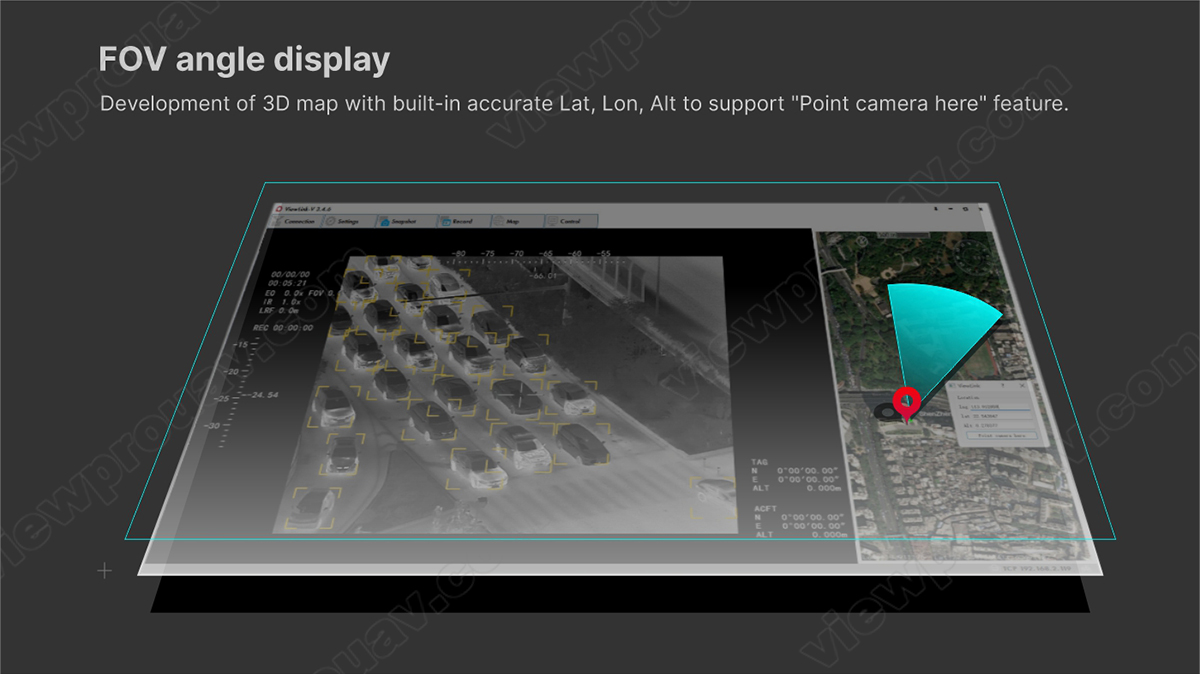
| وضع العلامات الجغرافية | دعم، عرض الوقت وإحداثيات GPS في الصورة exif |
| مواصفات المحرك المحوري | |
| النطاق الميكانيكي | Pitch/Tilt: -40°~100°, Roll: ±70°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| نطاق يمكن التحكم فيه | الميل/الإمالة: -35 درجة ~ 95 درجة، الانعراج/التدوير: ± 290 درجة / ± 360 درجة *N (إصدار إخراج IP) |
| زاوية الاهتزاز | الانحراف/الدوران: ± 0.02 درجة، الانعراج ± 0.02 درجة |
| مفتاح واحد إلى المركز | √ |
| مواصفات جهاز التصوير الحراري بالأشعة تحت الحمراء | |
| طول التركيز | 50 مم |
| غشاء الطلاء | DLC |
| مجال الرؤية الأفقية | 8.8° |
| مجال الرؤية الرأسي | 7.0° |
| مجال الرؤية القطرية | 11.2° |
| مسافة المحقق (رجل: 1.8 × 0.5 متر) | 2083 meters |
| التعرف على المسافة (رجل: 1.8 × 0.5 متر) | 521 meters |
| المسافة التي تم التحقق منها (رجل: 1.8 × 0.5 م) | 260 meters |
| مسافة المحقق (السيارة: 4.2 × 1.8 م) | 6389 meters |
| التعرف على المسافة (السيارة: 4.2 × 1.8 م) | 1597 meters |
| المسافة التي تم التحقق منها (السيارة: 4.2 × 1.8 م) | 799 meters |
| وضع العمل | جهاز تصوير حراري بموجة طويلة VOx غير مبرد (8 ميكرومتر إلى 14 ميكرومتر) |
| بكسل الكاشف | 640*512 |
| درجة البكسل | 12 ميكرومتر |
| طريقة التركيز | العدسة الأساسية الأثيرية |
| NETD | ≤[email protected] @25 ℃ |
| لوحة الألوان | الأبيض الساخن، والأسود الساخن، والأسود الساخن، واللون الزائف |
| تقريب رقمي | 1x ~ 8x |
| مزامنة الوقت الصحيح | نعم |
| IR Camera Object Tracking | |
| معدل تحديث بكسل الانحراف | 30 هرتز |
| تأخير إخراج بكسل الانحراف | <أقل من 30 مللي ثانية |
| الحد الأدنى من تباين الأجسام | 5% |
| SNR | 4 |
| الحد الأدنى لحجم الجسم | 16*16 بكسل |
| الحد الأقصى لحجم الجسم | 256*256 بكسل |
| سرعة التتبع | ±48 بكسل/إطار ± 48 |
| وقت ذاكرة الكائن | 100 إطار |
| AI Performance | |
| نوع الأهداف | السيارة والإنسان |
| كمية الكشف المتزامن | ≥ 10 أهداف |
| الحد الأدنى لنسبة التباين | 5% |
| الحد الأدنى لحجم الهدف | 5×5 بكسل |
| معدل اكتشاف السيارات | ≥85% |
| معدل الإنذار الكاذب | ≤10% |
| معلومات التعبئة والتغليف | |
| ن.و | 860g (Viewport version) |
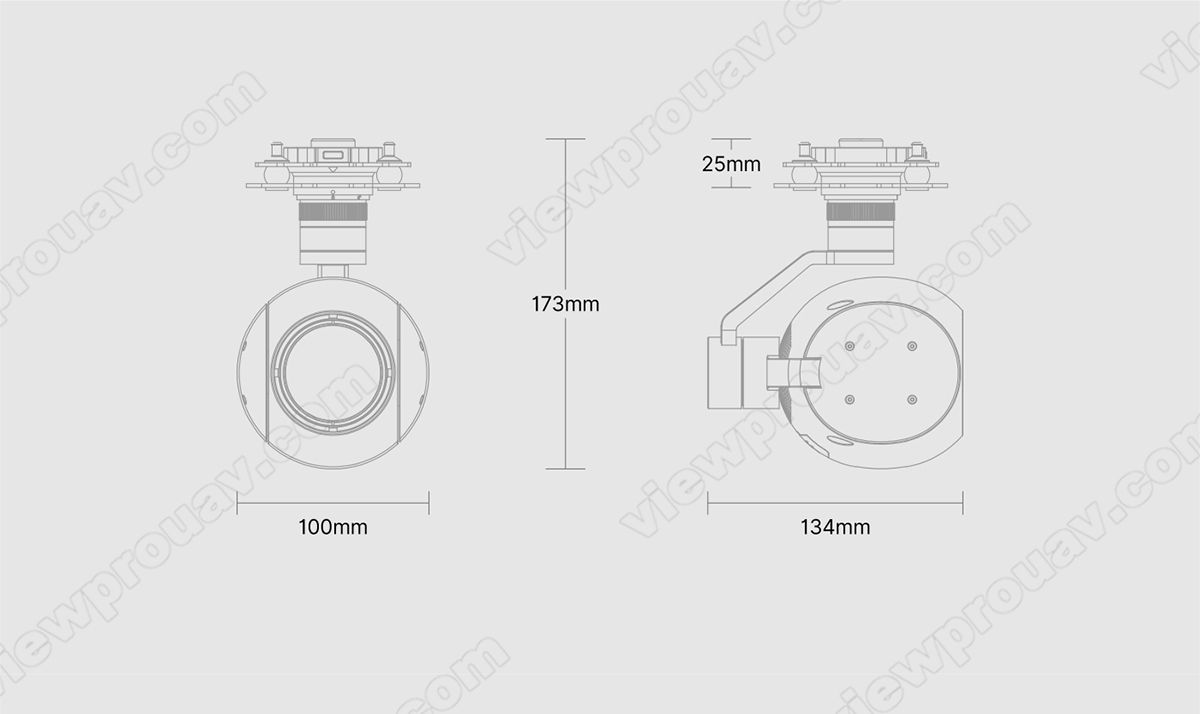
| قياس المنتج. | 134*100.8*167.5mm (Standard version) /134*100.8*173.2mm (Viewport version) |
| الإكسسوارات | 1pc gimbal camera device, screws, copper cylinders, damping balls,1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| ج. و. | 1969g |
| قياس العبوة. | 350*300*250 مم |
| الوزن | 1 كيلوجرام |
|---|
كن أول من يقيم “AT50 50mm 640*512 IR Thermal Camera with AI Automatic Tracking and 3-Axis Gimbal”
يجب عليك تسجيل الدخول لنشر مراجعة.
منتجات ذات صلة


المحركات ذات المحورين والحمولة
برنامج ZIR1352T احترافي ثلاثي المحاور عالي الدقة مع كاميرا تكبير حرارية مزدوجة عالية الدقة
€12,799.00


المحركات ذات المحورين والحمولة
كاميرا رسم الخرائط VOM-42 بدقة 42 ميجابكسل للمسح الجوي للمناطق الكبيرة
€0.00


المحركات ذات المحورين والحمولة
€0.00




المحركات ذات المحورين والحمولة
كاميرا Q40TIR عالية الدقة 40x تكبير 40x 50 ملم ذات مستشعر حراري مزدوج التتبع بالأشعة تحت الحمراء 4K
€0.00


المحركات ذات المحورين والحمولة
كاميرا QIR50T 50 مم ذات المحورين الحراري للطائرة بدون طيار QIR50T
€0.00


المحركات ذات المحورين والحمولة
€4,499.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
المراجعات
لا توجد مراجعات بعد.