











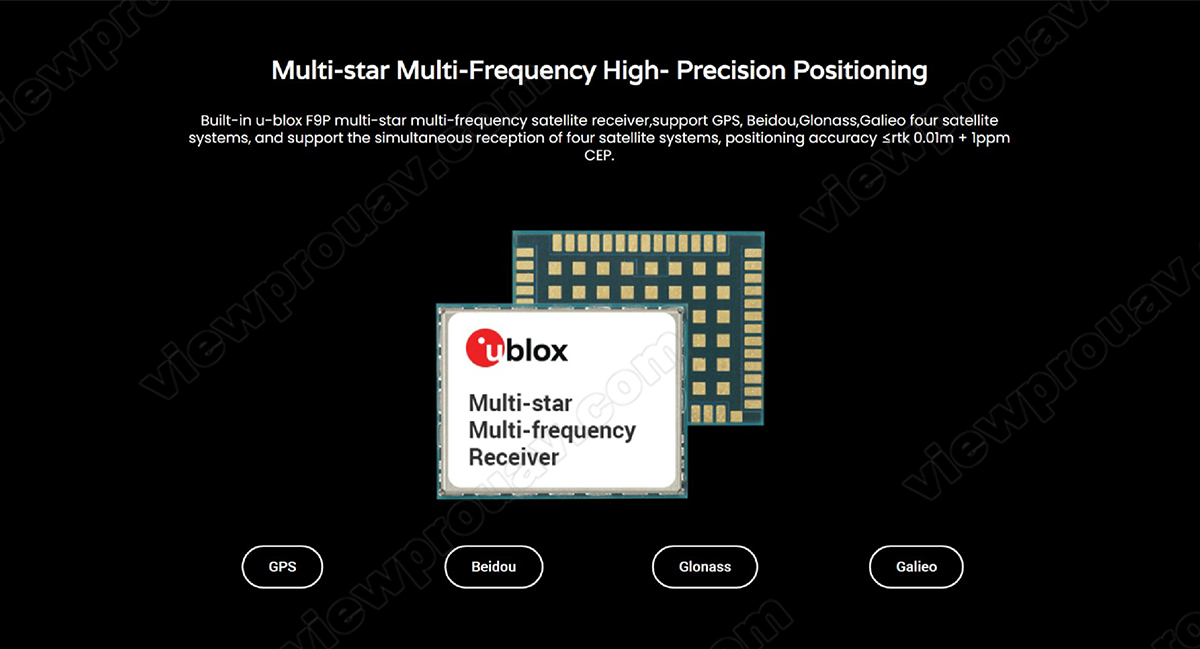










| RTK Receiver | ZED-F9P |
| Receiving channel | 184 |
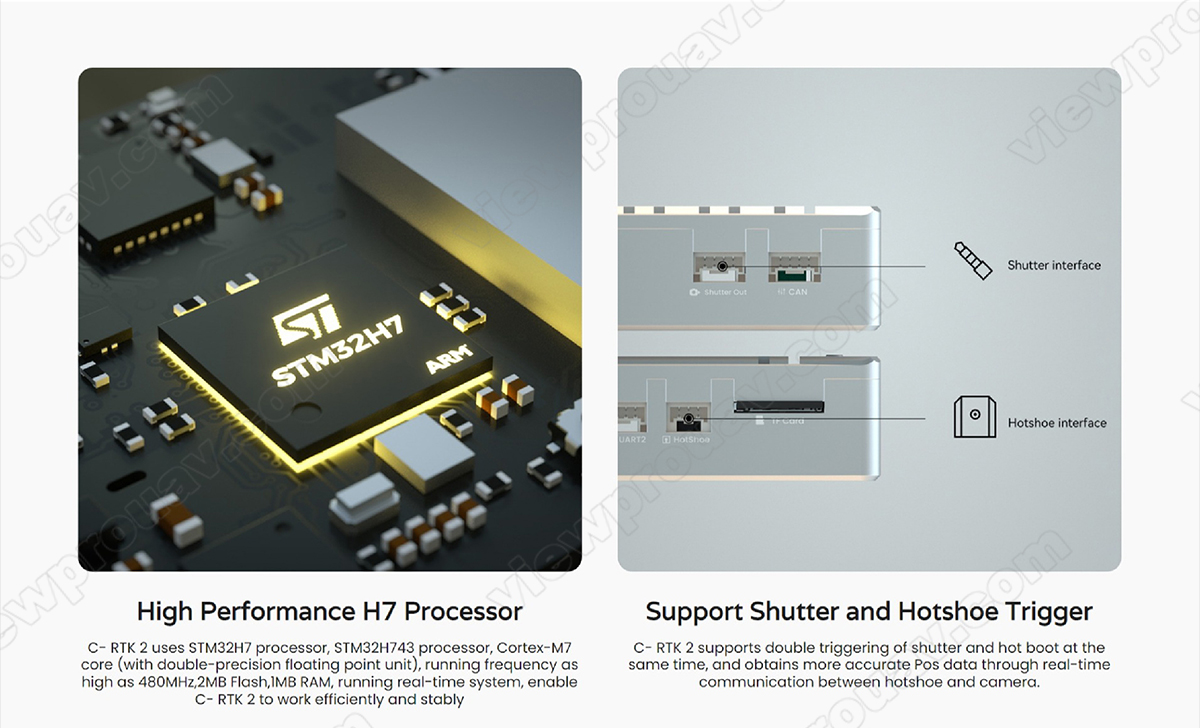
| Processor | STM32H743VIH6 |
| Flash | 2M |
| Ram | 1M |
| Accelerometor | ICM-20689 |
| Gyroscope | ICM-20689 |
| Compass | RM3100 |
| Barometer | ICP10111 |
| TF Card | 32G(Max) |
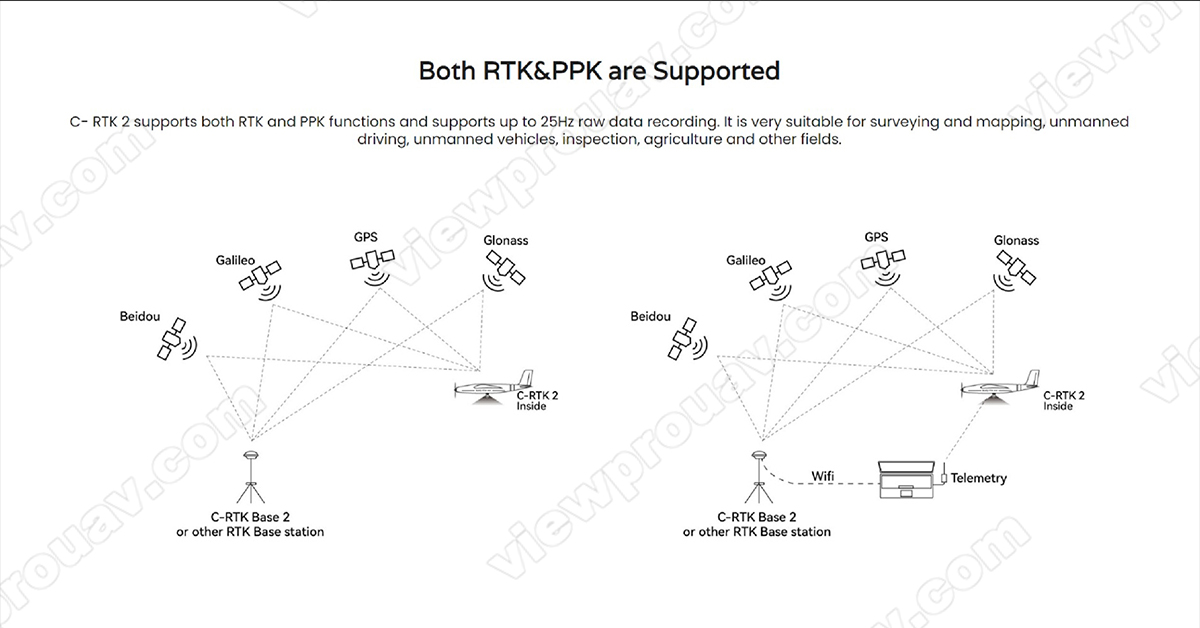
| PPK | Support |
| RTK | Support |
| GNSS system | GPS:L1C/A,L2C GLONASS:L1OF,L2OF Galieo:E1B/C,E5b Beidou:B1l,B2l |
| Enhanced system | QZSS:L1C/A,L2C,L1S SBAS:L1C/A |
| Concurrent GNSS | 4 |
| Nav Rate | RTK:20Hz(max) PPK:25HZ(max) default:5Hz |
| Convergence Time | RTK<10s |
| Accuracy(RMS) | RTK Level:0.01m+1ppm(RMS) RTK Vertical:0.02m+1ppm(RMS) GPS:1.5m(RMS) |
| Acquisition | Cold start:24s Hot start:1s Reacquisition:2s |
| Sensitivity | Tracking & Nav:-167dBm Cold starts:-148dBm Hot starts:-157dBm Reacquisitio:-160dBm |
| Anti-spoofng | Advanced anti-spoofng algorithms |
| Protocols | UAVCAN/NMEA/UBX(RAW)/RTCM3.3 |
| Time pulse | 0.25Hz~10Mhz(Configurable) |
| Anti-jamming | Active CW detection and removal Onboard band pass flter |
| Flight controller support | Compatible with flight controllers running ArduPilot/PX4 firmware |
| Coordinate system | WGS84 |
| Interface | |
| Hotshoe | 1 |
| Shutter in | 1 |
| Shutter out | 1 |
| Type C | 1(Hight speed USB) |
| F9P USB | 1 |
| F9P UART | 1 |
| CAN | 1 |
| Antenna interface Type | 1(mmcx) |
| Operating temperature | |
| Supply voltage | 4.5~6v |
| Operating temperature | -20~85℃ |
| Size | 56x33x16.5mm |
| Weight | 39g |
| الوزن | 1 كيلوجرام |
|---|
كن أول من يقيم “C-RTK2 PPK/RTK High-precise Positioning Module for Mapping”
يجب عليك تسجيل الدخول لنشر مراجعة.
منتجات ذات صلة


UAV Accessories
€279.00


€229.99


Flight Controller & GPS & RTK
€949.00


UAV Accessories
€159.00


UAV Accessories
€185.00


Flight Controller & GPS & RTK
TS-2 Singal Enhancement Antenna Tripod Stabilizer Kits for Drone GCS
€599.00


€799.90


UAV Accessories
Skyrc D100 V2 Charger Twin-Channel AC/DC LiPo 1-6s For LiPo/ LiFe/ LiIon App Control
€139.00
المراجعات
لا توجد مراجعات بعد.