


















| معلمة الجهاز | |
| جهد العمل | 16V |
| جهد الإدخال | 4 ثوانٍ ~ 6 ثوانٍ (14.8 فولت ~ 25.2 فولت) |
| جهد الخرج | 5 فولت (توصيل مع PWM) |
| التيار الديناميكي | 750~1500mA @16V |
| استهلاك الطاقة | Average 12W, Max 24W |
| درجة حرارة بيئة العمل المؤقتة. | -20℃ ~ +50℃ |
| الإخراج (اختياري) | micro HDMI(1080P 60fps) / IP (RTSP/UDP 720p/1080p 25fps/30fps H264/H265) / SDI (1080P 30fps) |
| التخزين المحلي | SD card (Up to 512G,class 10, FAT32 format) |
| تنسيق تخزين الصور في بطاقة TF | JPG(1920*1080) |
| تنسيق تخزين الفيديو في بطاقة TF | MP4 (1080P 30 إطاراً في الثانية) |
| قراءة البطاقات عبر الإنترنت | قراءة SMB للصور أو مقاطع الفيديو / قراءة HTTP للصور أو مقاطع الفيديو |
| طريقة التحكم | pwm / ttl / s.bus / tcp / udp |
| وضع العلامات الجغرافية | دعم، عرض الوقت وإحداثيات GPS في الصورة exif |
| مواصفات المحرك المحوري | |
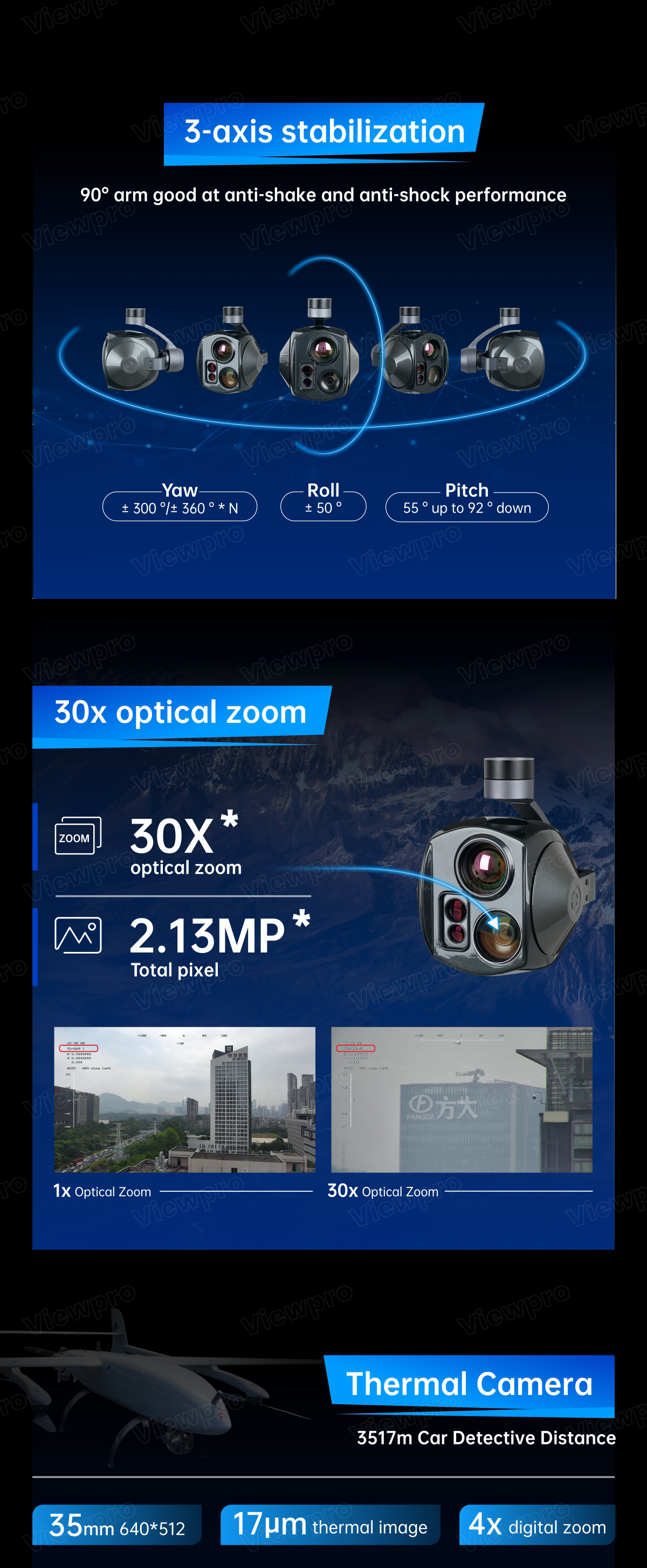
| النطاق الميكانيكي | Pitch/Tilt: -55°~92°, Roll: ±50°, Yaw/Pan: ±300° / ±360°*N (IP / SDI output version) |
| نطاق يمكن التحكم فيه | Pitch/Tilt: -45°~90°, Yaw/Pan: ±290° / ±360°*N (IP / SDI output version) |
| زاوية الاهتزاز | الانحراف/الدوران/الانعراج: ± 0.02 درجة |
| مفتاح واحد إلى المركز | √ |
| مواصفات كاميرا EO | |
| مستشعر التصوير | 1/2.8 Type STARVIS2 CMOS Sensor |
| جودة الصورة | الوضوح العالي الكامل 1080 (1920*1080) |
| بكسل فعال | 2.13 ميجابكسل |
| عدسة التكبير/التصغير البصري | 30x، F=4.3 ~ 129 مم |
| تقريب رقمي | 12 ضعفًا (360 ضعفًا مع التكبير/التصغير البصري) |
| الحد الأدنى لمسافة الجسم | 10mm(wide end) to 1200mm(tele end) |
| زاوية الرؤية الأفقية | 64.0°(wide end) ~ 2.4°(tele end) |
| نظام المزامنة | داخلي |
| نسبة S/N | أكثر من 50 ديسيبل |
| الحد الأدنى من الإضاءة | Color 0.009 lux (1/30 sec, 50%, High Sensitivity mode On) |
| Color 0.09 lux (1/30 sec, 50%, High Sensitivity mode Off ) | |
| التحكم في التعرض | Auto, Manual, Priority mode(shutter priority & iris priority), EV compensation, Slow AE |
| المكاسب | Auto/Manual 0dB to 50.0dB(0 to 28 steps) Max.Gain Limit 10.7 dB to 50.0dB (6 to 28 steps) |
| توازن اللون الأبيض | أوتوماتيكي، ATW، داخلي، خارجي، خارجي، خارجي بضغطة واحدة، WB، WB يدوي، خارجي أوتوماتيكي، مصباح بخار الصوديوم (ثابت/خارجي/أوتوماتيكي) |
| سرعة الغالق | 1/1 إلى 1/1 إلى 1/10،000، 22 خطوة |
| تعويض الإضاءة الخلفية | نعم |
| إزالة الضباب | نعم |
| مواصفات جهاز التصوير الحراري بالأشعة تحت الحمراء | |
| طول التركيز | 35 مم |
| مجال الرؤية الأفقية (درجة) | 12.5° |
| مجال الرؤية العمودي (درجة) | 10.0° |
| مجال الرؤية القطري (درجة) | 16.0° |
| مسافة المحقق (رجل: 1.8 × 0.5 متر) | 1458 متراً |
| التعرف على المسافة (رجل: 1.8 × 0.5 متر) | 365 meters |
| المسافة التي تم التحقق منها (رجل: 1.8 × 0.5 م) | 182 متراً |
| مسافة المحقق (السيارة: 4.2 × 1.8 م) | 4472 متراً |
| التعرف على المسافة (السيارة: 4.2 × 1.8 م) | 1118 متراً |
| المسافة التي تم التحقق منها (السيارة: 4.2 × 1.8 م) | 559 متراً |
| وضع العمل | جهاز تصوير حراري طويل الموجة غير مبرد (8 ميكرومتر إلى 14 ميكرومتر) |
| بكسل الكاشف | 640*512 |
| درجة البكسل | 12 ميكرومتر |
| طريقة التركيز | العدسة الأساسية الأثيرية |
| تصحيح الانبعاثية | 0.01~1 |
| NETD | ≤50mK (≤25 ℃) |
| MRTD | ≤650mK (التردد المعهود) |
| تحسين الصورة | ضبط سطوع الصورة ونسبة التباين تلقائياً |
| لوحة الألوان | أبيض، أحمر حديدي، لون زائف |
| التصحيح التلقائي غير المنتظم | نعم (بدون مصراع) |
| تقريب رقمي | 1x ~ 4x |
| نوع قياس الحرارة | غير مدعوم |
| جهاز تحديد المدى بالليزر | |
| أطوال موجات الليزر | 1550 نانومتر |
| الفتحة البصرية | Transmit 13mm / Receive17 mm |
| القرار | 0.75m |
| قياس القدرة على القياس | 3000m (Typical value 1: Object size: the target surface is larger than the laser spot area Reflectivity: 60% Accuracy rate: 90% Visibility: 10 km Environment temperature: 20℃ Atmospheric pressure: 1013 mbar) |
| قياس هدف المركبة المستهدفة | 2300m (Typical value 2: Object size: 2.3*2.3 m Emissivity: 30% Others same as Typcial value 1) |
| أمان للعين | الفئة 1 【المعيار IEC 60825-1، الإصدار الثاني (2007-03)】 |
| زاوية شعاع الليزر (القيمة النموذجية) | 1.0 مارد |
| Accuracy (Typical value) | ± 0.75m |
| الدقة (في الظروف القاسية) | ± 2m |
| تردد القياس | 2 هرتز |
| دقة الكائن (القيمة النموذجية) | 30m |
| تتبع الأجسام بكاميرا EO/كاميرا الأشعة تحت الحمراء | |
| معدل تحديث بكسل الانحراف | 50 هرتز |
| تأخير إخراج بكسل الانحراف | 5 مللي ثانية |
| الحد الأدنى من تباين الأجسام | 5% |
| SNR | 4 |
| الحد الأدنى لحجم الجسم | 32*32 بكسل |
| الحد الأقصى لحجم الجسم | 128*128 بكسل |
| سرعة التتبع | ±48 بكسل/إطار ± 48 |
| وقت ذاكرة الكائن | 100 إطار (4 ثوانٍ) |
| متوسط الجذر التربيعي لقيم الجذر التربيعي لضوضاء النبض في موضع الجسم | < 0.5 بكسل |
| الميزات | |
| قسم دعم العمليات | عرض زاوية الانعراج وزاوية الانحراف والميل، والتكبير، وقيمة المدى، ومدة تسجيل البطاقة، ونظام تحديد المواقع والارتفاع للطائرة أو نظام تحديد المواقع والارتفاع للطائرة أو نظام تحديد المواقع والارتفاع لنقطة تحديد المواقع والارتفاع للهدف (اختر أحدهما، ونظام تحديد المواقع والارتفاع لنقطة تحديد المواقع والارتفاع للهدف)، والتاريخ والوقت |
| وضع العلامات الجغرافية | عرض الوقت وإحداثيات نظام تحديد المواقع العالمي (GPS) في الصورة exif |
| قراءة البطاقات عبر الإنترنت | قراءة SMB للصور أو مقاطع الفيديو / قراءة HTTP للصور أو مقاطع الفيديو |
| KLV (UDP) | تسجيل البطاقة أو تشغيل فيديو Viewlink |
| ArduPilot / PX4 | Support(Mavlink protocol ) Optional: Support Ardupilot Follow me feature |
| خياطة الفيديو | إيو+إير+إير/إير+إيو/إيو/إير |
| إخراج دفق فيديو مزدوج | غير مدعوم (إخراج دفقين من EO و IR) |
| معلومات التعبئة والتغليف | |
| ن.و | 1116g / 1163g(Viewport version with Viewport) |
| قياس المنتج. | 165.1*130.6*203.2mm / 165.1*130.6*208.9mm(Viewport version with Viewport) |
| الإكسسوارات | 1pc gimbal camera device, screws, copper cylinders, damping balls,1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| ج. و. | 3518g |
| قياس العبوة. | 360*300*250 مم |
| الوزن | 1 كيلوجرام |
|---|
كن أول من يقيم “Q30TIRM Pro 30x Zoom EO/IR 3KM High-level Laser Rangefinder Object Tracking Camera”
يجب عليك تسجيل الدخول لنشر مراجعة.
منتجات ذات صلة




المحركات ذات المحورين والحمولة
€0.00




المحركات ذات المحورين والحمولة
كاميرا رسم الخرائط VOM-42 بدقة 42 ميجابكسل للمسح الجوي للمناطق الكبيرة
€0.00


المحركات ذات المحورين والحمولة
€8,999.00


المحركات ذات المحورين والحمولة
€6,199.00


المحركات ذات المحورين والحمولة
كاميرا QIR50T 50 مم ذات المحورين الحراري للطائرة بدون طيار QIR50T
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
المحركات ذات المحورين والحمولة
€14,999.00
المراجعات
لا توجد مراجعات بعد.