
















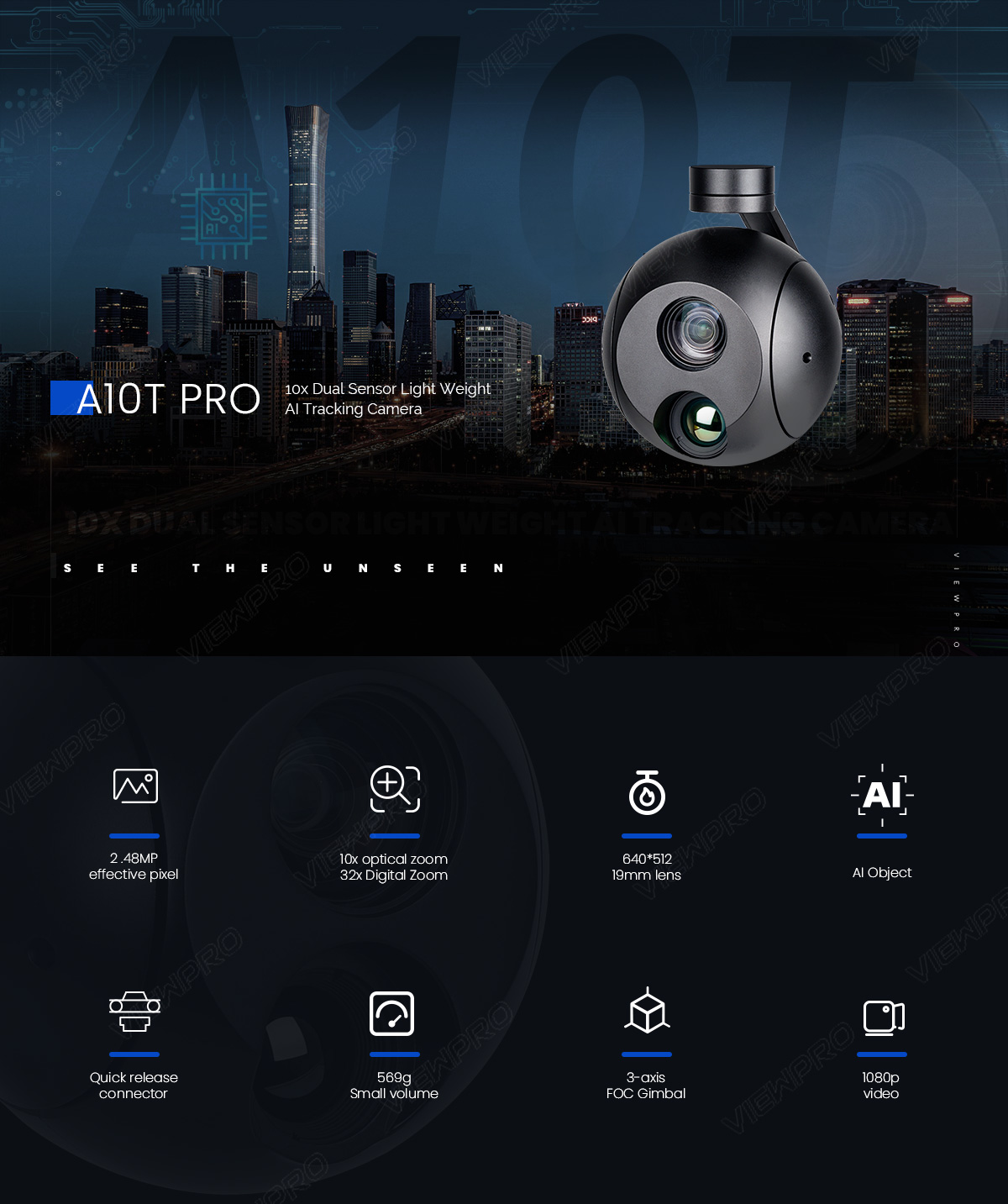
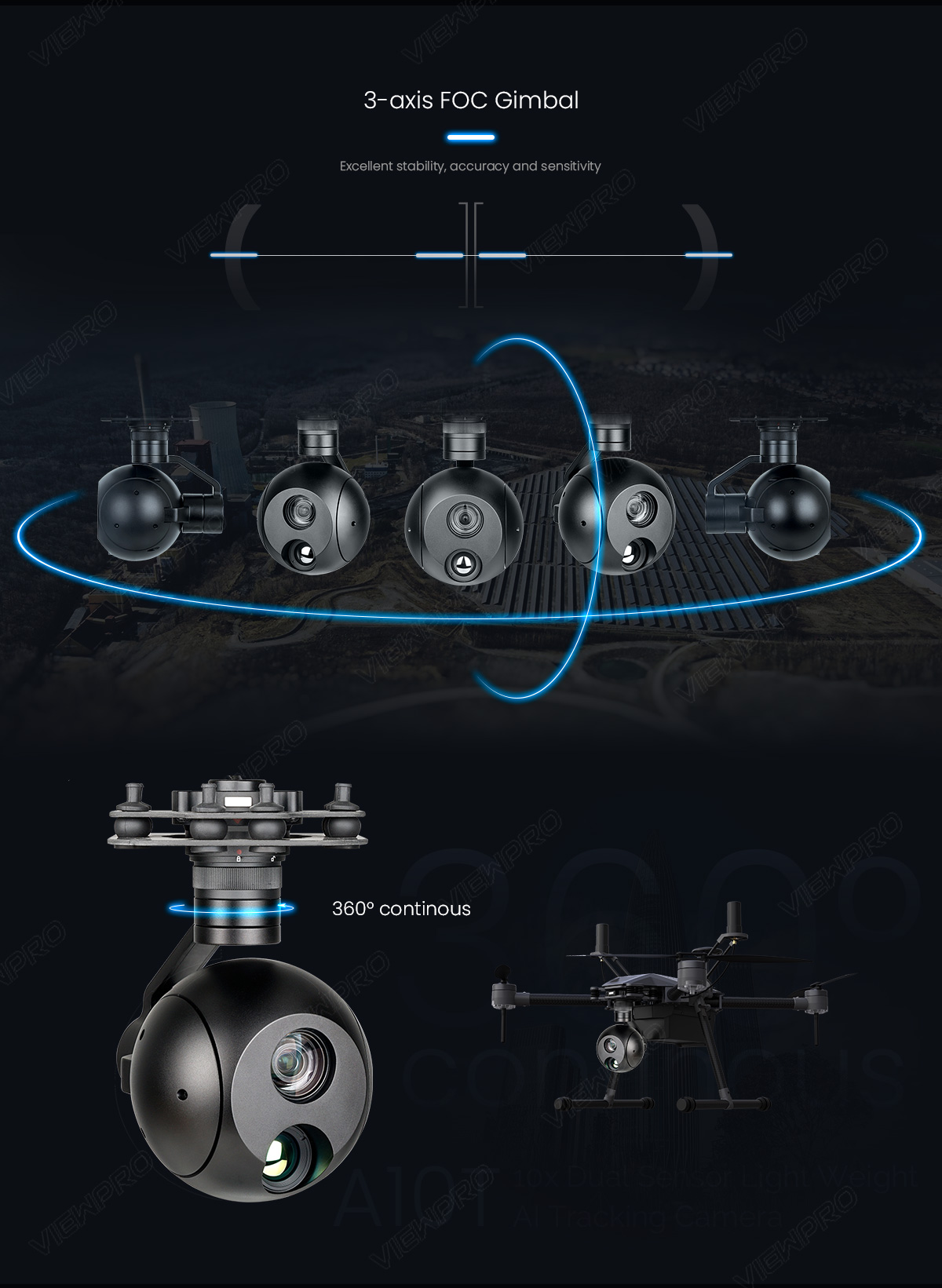
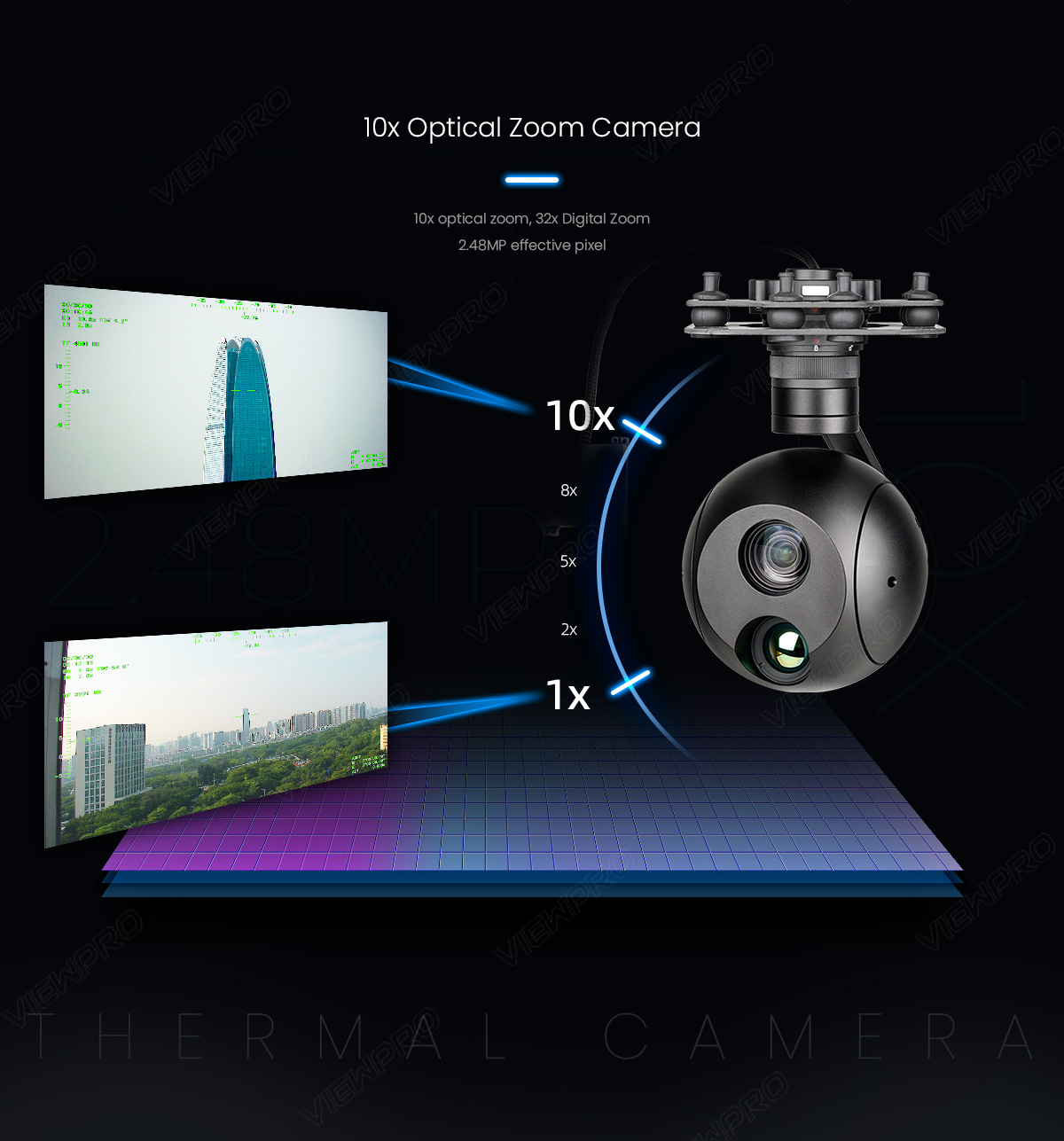
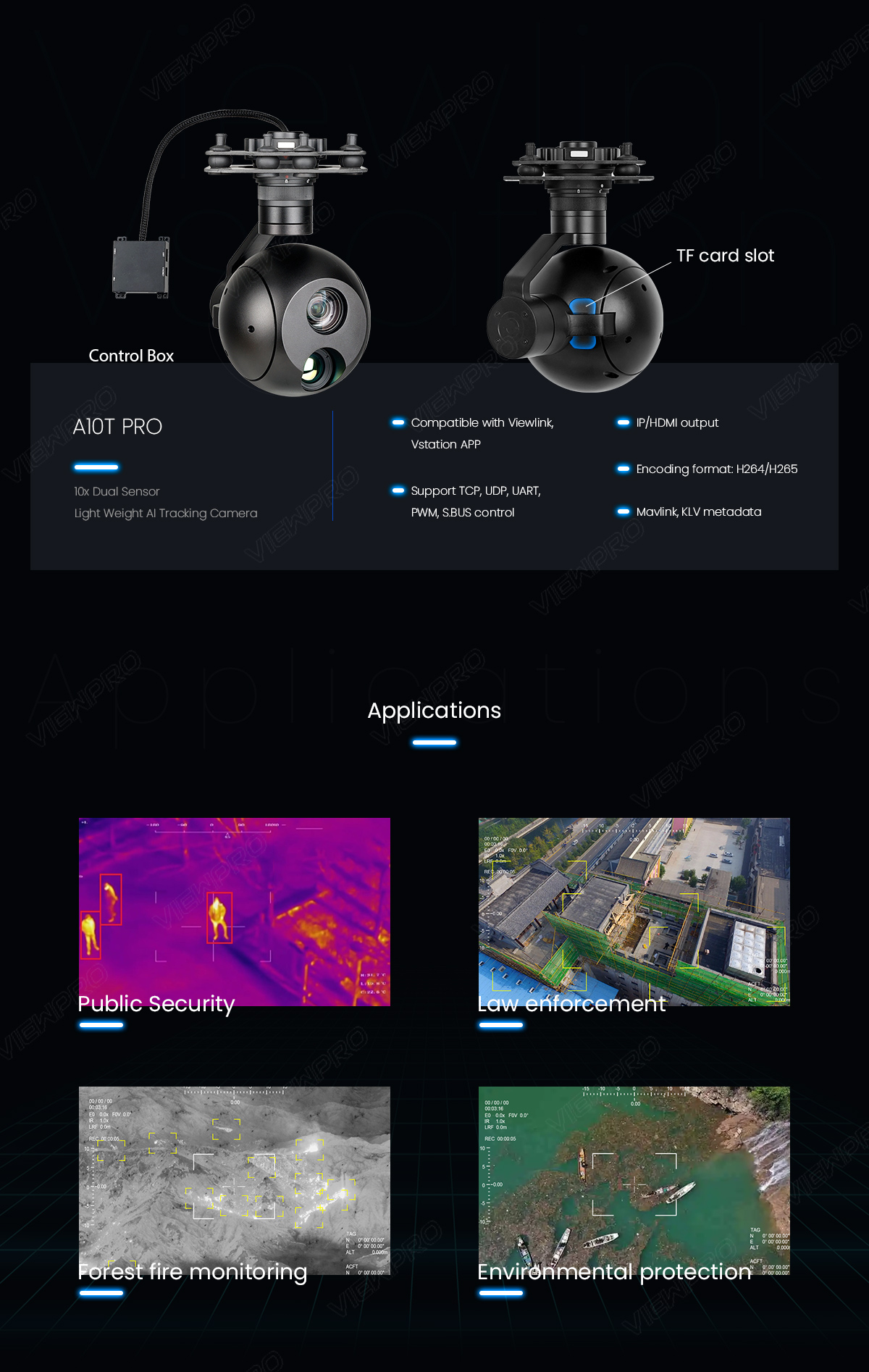
كاميرا A10T Pro عبارة عن كاميرا ذات جهاز استشعار مزدوج ذات محورين تتميز بوزن صافٍ خفيف يبلغ 539 جرامًا وحجم صغير وهيكل مدمج، وهي تدمج كاميرا تقريب بصري 10x وكاميرا حرارية بعدسة 19 مم 640*512. وهي مزوّدة بجيمبال ثلاثي المحاور عالي الدقة يتميز بنسيج معدني أفضل، ومضاد للتداخل وتبديد أفضل للحرارة. وهي مدمجة مع وحدة تحديد وتتبع الكائنات بالذكاء الاصطناعي، والتي يمكنها تحقيق التعرف على السيارات والبشر والتتبع التلقائي، وتستخدم على نطاق واسع في صناعات الطائرات بدون طيار للتفتيش والمراقبة والبحث والإنقاذ والتطبيقات الصناعية الأخرى.




| معلمة الجهاز | |
| جهد العمل | 16V |
| جهد الإدخال | 4 ثوانٍ ~ 6 ثوانٍ (14.8 فولت ~ 25.2 فولت) |
| جهد الخرج | 5 فولت (توصيل مع PWM) |
| التيار الديناميكي | 700 ~ 1250 مللي أمبير @ 16 فولت |
| استهلاك الطاقة | متوسط 11.2 واط في المتوسط، 20 واط كحد أقصى |
| درجة حرارة بيئة العمل المؤقتة. | -20℃ ~ +50℃ |
| المخرجات | ميكرو HDMI (1080P 30 إطارًا في الثانية/60 إطارًا في الثانية) / IP (RTSP/UDP 720p/1080p 30 إطارًا في الثانية H264/H265) |
| التخزين المحلي | بطاقة SD (حتى 256 جيجابايت، فئة 10، FAT32) |
| تنسيق تخزين الصور | JPG(1920*1080) |
| تنسيق تخزين الفيديو | MP4 (1080P 30 إطاراً في الثانية) |
| طريقة التحكم | pwm / ttl / s.bus / tcp / udp |
| مواصفات المحرك المحوري | |
| نطاق زاوية تصميم الهيكل | الميل/الإمالة: -50 درجة 135 درجة، الدوران: ± 70 درجة، الانعراج/التدوير: ± 300 درجة / ± 360 درجة *N (إصدار إخراج IP) |
| نطاق زاوية تصميم البرامج | الانحراف/الميل: -45 درجة ~130 درجة، الانعراج/الميلان: ± 290 درجة / ± 360 درجة *N (إصدار إخراج IP) |
| زاوية الاهتزاز | الانحراف/الدوران/الانعراج: ± 0.02 درجة |
| مفتاح واحد إلى المركز | √ |
| مواصفات كاميرا EO | |
| مستشعر التصوير | مستشعر SONY CMOS مقاس 1/2.8 بوصة |
| إجمالي البكسل | 5.13 ميجابكسل |
| جودة الصورة | الوضوح العالي الكامل 1080 (1920*1080) |
| التكبير/التصغير البصري | 10 أضعاف، f = 4.7 مم ~ 47 مم، F1.7 ~ F3.1 |
| تقريب رقمي | 32x |
| زاوية الرؤية (H) | 69.9 درجة (طرف عريض) ~ 8.7 درجة (طرف مقرب) |
| الحد الأدنى للمسافة المستهدفة | 0.1 / 1.5 / 3.0 / 5.0 / 10.0 m |
| الحد الأدنى من الإضاءة | اللون (1/30 ثانية، 72.0 ديسيبل): 0.02 لوكس، BW (1/30 ثانية، 72.0 ديسيبل): 0.005 لوكس DSS DSS ملون (1/1 ثانية، 72.0 ديسيبل): 0.002 لوكس، DSS BW (1/1 ثانية، 72.0 ديسيبل): 0.0005 لوكس |
| توازن اللون الأبيض | تلقائي / بضغطة واحدة / يدوي / داخلي / خارجي |
| سرعة الغالق | 1/1 ثانية ~ 1/100,000 ثانية |
| التركيز | تلقائي / دفعة واحدة / يدوي |
| التعرض | تلقائي / يدوي / وضع الأولوية (أولوية الغالق وأولوية فتحة العدسة) |
| تعويض الإضاءة الخلفية | نعم |
| ICR التلقائي | نعم |
| تثبيت الصورة | نعم |
| إزالة الضباب | نعم |
| مواصفات جهاز التصوير الحراري بالأشعة تحت الحمراء | |
| طول التركيز | 19 مم |
| مجال الرؤية الأفقية | 22.9° |
| مجال الرؤية الرأسي | 18.4° |
| مجال الرؤية القطرية | 29.0° |
| مسافة المحقق (رجل: 1.8 × 0.5 متر) | 792 متراً |
| التعرف على المسافة (رجل: 1.8 × 0.5 متر) | 198 متراً |
| المسافة التي تم التحقق منها (رجل: 1.8 × 0.5 م) | 99 متراً |
| مسافة المحقق (السيارة: 4.2 × 1.8 م) | 2428 متراً |
| التعرف على المسافة (السيارة: 4.2 × 1.8 م) | 607 أمتار |
| المسافة التي تم التحقق منها (السيارة: 4.2 × 1.8 م) | 303 أمتار |
| وضع العمل | جهاز تصوير حراري بموجة طويلة VOx غير مبرد (8 ميكرومتر إلى 14 ميكرومتر) |
| بكسل الكاشف | 640*512 |
| حجم البكسل | 12 ميكرومتر |
| طريقة التركيز | العدسة الأساسية الأثيرية |
| NETD | ≤50mK@25 ℃، F#1.0 (<=40mk اختياري) |
| لوحة الألوان | أبيض، أحمر حديدي، لون زائف |
| تقريب رقمي | تكبير/تصغير مستمر 1x ~ 4x (طول الخطوة 0.1) |
| وظيفة القياس الإشعاعي (اختياري) | اختياري (- 20 ℃ ~ + 150 ℃، + 100 ℃ ~ + 550 ℃) |
| EO/كاميرا تتبع الأجسام بالأشعة تحت الحمراء | |
| معدل تحديث بكسل الانحراف | 30 هرتز |
| تأخير إخراج بكسل الانحراف | <أقل من 30 مللي ثانية |
| الحد الأدنى من تباين الأجسام | 5% |
| SNR | 4 |
| الحد الأدنى لحجم الجسم | 16*16 بكسل |
| الحد الأقصى لحجم الجسم | 256*256 بكسل |
| سرعة التتبع | ±48 بكسل/إطار ± 48 |
| وقت ذاكرة الكائن | 100 إطار |
| أداء الذكاء الاصطناعي لكاميرا EO Camera AI | |
| نوع الأهداف | السيارة والإنسان |
| كمية الكشف المتزامن | ≥ 10 أهداف |
| الحد الأدنى لنسبة التباين | 5% |
| الحد الأدنى لحجم الهدف | 5×5 بكسل |
| معدل اكتشاف السيارات | ≥85% |
| معدل الإنذار الكاذب | ≤10% |
| الميزات | |
| قسم دعم العمليات | عرض زاوية الانحراف وزاوية الانحراف، والتكبير، ومدة تسجيل البطاقة، ونظام تحديد المواقع والارتفاع للطائرة، ونظام تحديد المواقع والارتفاع لنقطة تحديد المدى المستهدفة والتاريخ والوقت |
| وضع العلامات الجغرافية | عرض الوقت وإحداثيات نظام تحديد المواقع العالمي (GPS) في الصورة exif |
| قراءة البطاقات عبر الإنترنت | HTTP قراءة الصور أو مقاطع الفيديو |
| KLV (UDP) | تسجيل البطاقة أو تشغيل فيديو Viewlink |
| ArduPilot / PX4 | الدعم (بروتوكول Mavlink) اختياري: دعم ميزة Ardupilot اتبعني |
| خياطة الفيديو | إيو+إير+إير/إير+إيو/إيو/إير |
| إخراج دفق فيديو مزدوج (اختياري) | دعم (إخراج دفقين من EO و IR، ملاحظات: يتعذر التسجيل بمجرد تنشيط إخراج دفق الفيديو الدولالي) |
| معلومات التعبئة والتغليف | |
| ن.و | 745 ± 10 جم (إصدار منفذ عرض مع منفذ عرض) |
| قياس المنتج. | 121.5*96*96*161.6 مم / 121.5*96*96*167.3 مم (إصدار منفذ العرض) |
| الإكسسوارات | 1 قطعة جهاز كاميرا ذات محور، ومسامير، وكابل USB إلى TTL / صندوق عالي الجودة مع وسادة رغوية |
| ج. و. | 1815g |
| قياس العبوة. | 300*250*200 مم |
| الوزن | 1 كيلوجرام |
|---|
كن أول من يقيم “A10T Pro 10x Dual Sensor Light Weight AI Tracking Camera”
يجب عليك تسجيل الدخول لنشر مراجعة.
منتجات ذات صلة


المحركات ذات المحورين والحمولة
كاميرا Q30TIRM Pro بتقريب 30x EO/IR 3KM عالية المستوى لتحديد المدى بالليزر لتتبع الأجسام


المحركات ذات المحورين والحمولة


المحركات ذات المحورين والحمولة
كاميرا QIR50T 50 مم ذات المحورين الحراري للطائرة بدون طيار QIR50T




المحركات ذات المحورين والحمولة


المحركات ذات المحورين والحمولة
سلسلة Hawkeye U818 سلسلة كاميرا التتبع ذات العدسة الرئيسية الدقيقة ذات المستشعر المزدوج للمراقبة


المحركات ذات المحورين والحمولة
كاميرا Q40TIR عالية الدقة 40x تكبير 40x 50 ملم ذات مستشعر حراري مزدوج التتبع بالأشعة تحت الحمراء 4K


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
المحركات ذات المحورين والحمولة
المراجعات
لا توجد مراجعات بعد.