














.jpeg)








.jpeg)
| Hardware-Parameter | |
| Betriebsspannung | 16V |
| Eingangsspannung | 4S ~ 6S (14.8V~25.2V) |
| Ausgangsspannung | 5V (Verbindung mit PWM) |
| Dynamischer Strom | 1000~1500mA @ 16V |
| Power consumption | Average 16W, Max 24W |
| Arbeitsumgebung temp. | -20℃ ~ +50℃ |
| Output (optional) | IP (RTSP/UDP 720p/1080p 25fps/30fps H264/H265) / SDI (1080P 30fps) |
| Lokaler Speicher | TF card (Up to 512G,class 10, FAT32 format) |
| Bildspeicherformat auf der TF-Karte | JPG(1920*1080) |
| Video-Speicherformat auf der TF-Karte | MP4(1080P 30fps) |
| Kontrollmethode | PWM / TTL / S.BUS / TCP / UDP |
| Kardanische Spezifikation | |
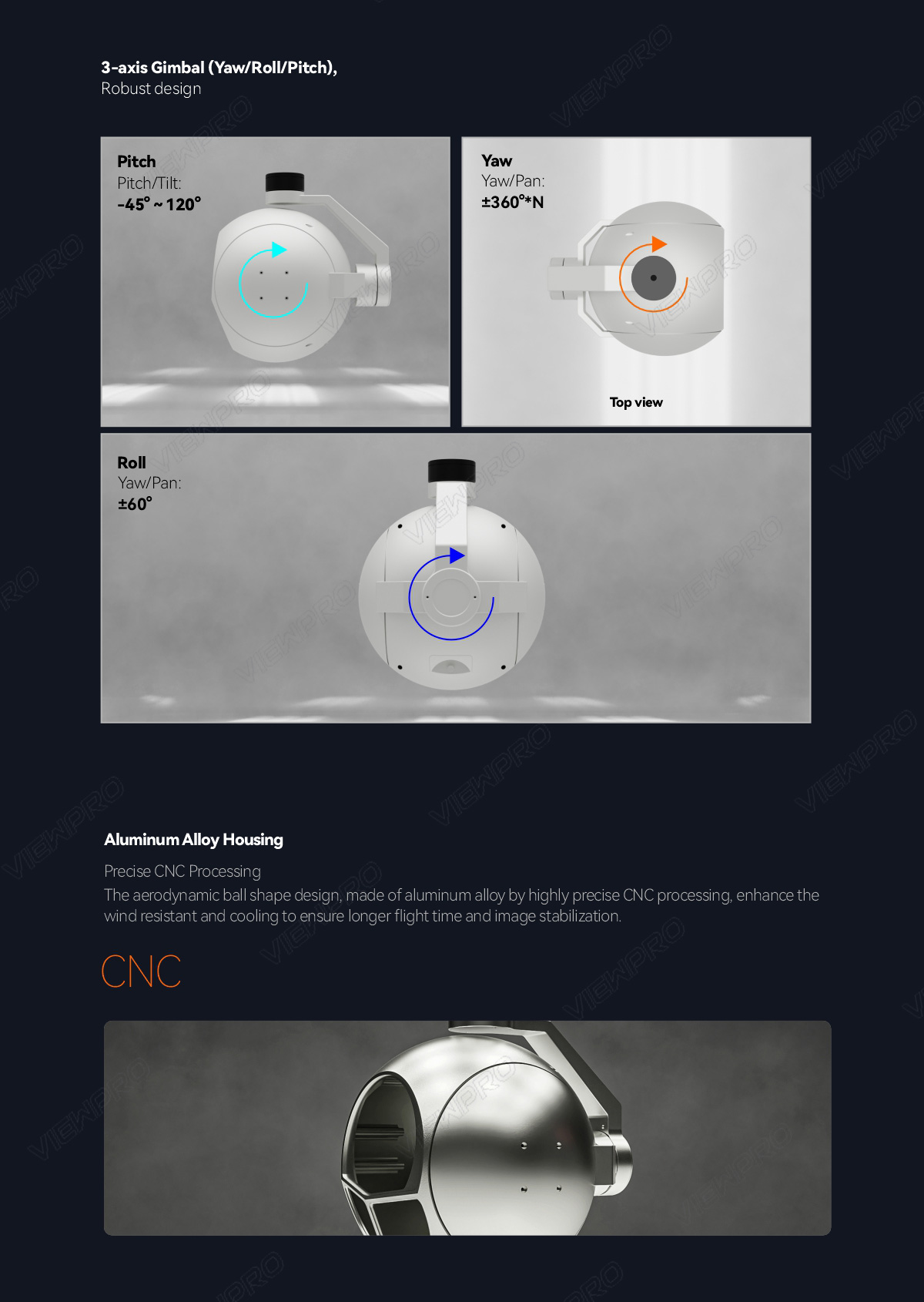
| Mechanischer Bereich | Pitch/Tilt:-55°~105°, Roll: ±60°, Yaw/Pan: ±360°*N |
| Kontrollierbarer Bereich | Pitch/Tilt: -45°~100°, Yaw/Pan: ±360°*N |
| Schwingungswinkel | Pitch/Roll/Yaw: ±0.02° |
| Ein-Schlüssel-Zentrum | √ |
| EO-Kamera-Spezifikation | |
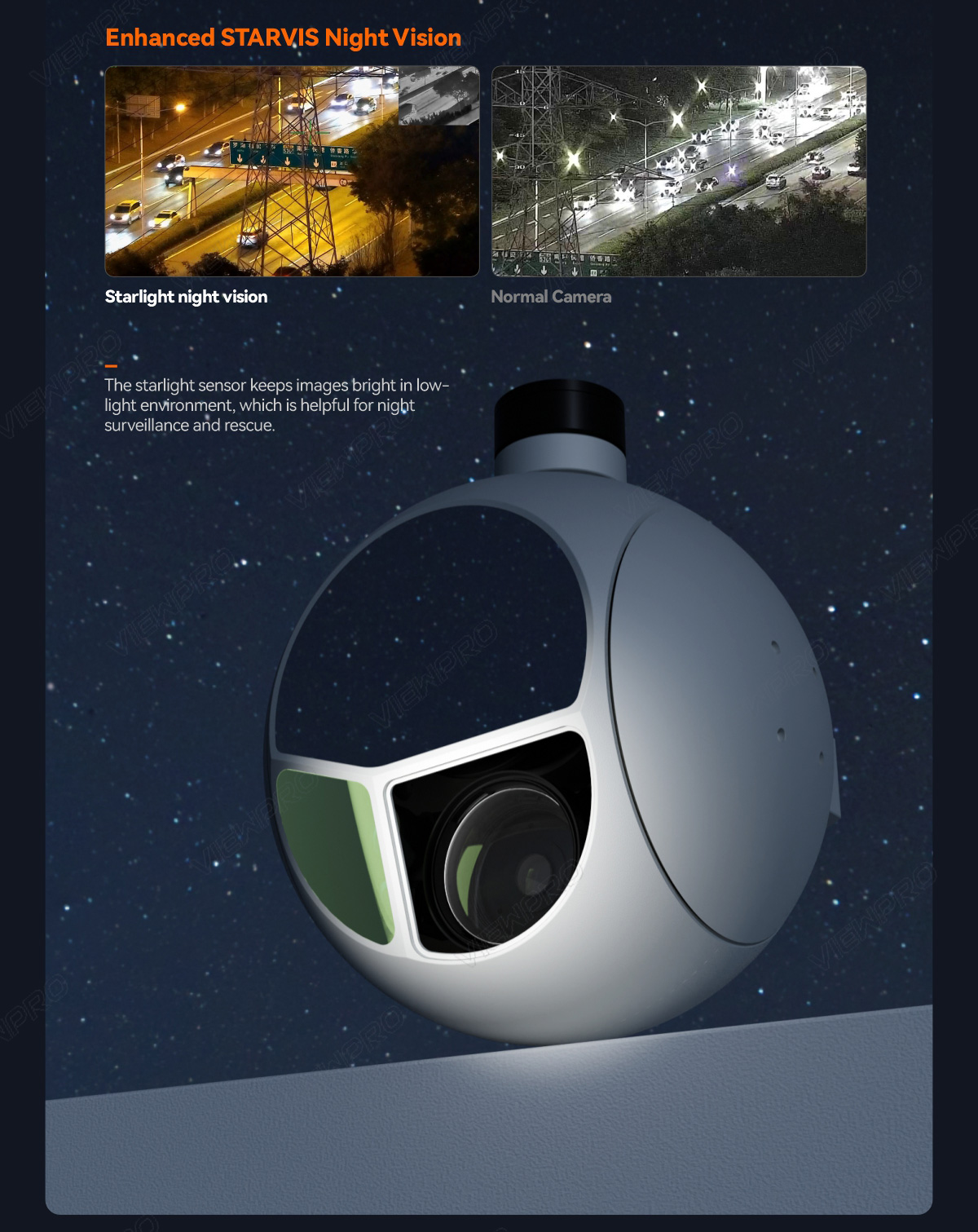
| Bildsensor | 1/1,8 Typ STARVIS CMOS-Sensor |
| Bildqualität | 4,17MP |
| Optischer Zoom des Objektivs | 30x, f=6,5~162,5mm, F1,6 bis F4,8 |
| Digitaler Zoom | 12x (max. 432x mit StableZoom) |
| Minimaler Objektabstand | 100 mm (breites Ende), 1200 mm (Tele-Ende) |
| Horizontaler Betrachtungswinkel | 58,1°(weites Ende) ~ 2,3°(Teleende) |
| Bild S/N | 50 dB (Gewicht ein) |
| Min Beleuchtungsstärke | Im Falle von ICR-Off (Typischer Wert) 0,009 lx (1/30 s, 50%, Modus Hohe Empfindlichkeit Ein) 0,09 lx (1/30 s, 50%, Modus "Hohe Empfindlichkeit" aus) 0,0012 lx (1/4 Sek., 1/3 Sek., 50%, Modus Hohe Empfindlichkeit Ein) 0,012 lx (1/4 s, 1/3 s, 50%, Modus "Hohe Empfindlichkeit" aus) Im Falle von ICR-On 0,00008 lx (1/30 s, 50%, Modus "Hohe Empfindlichkeit" eingeschaltet) 0,00063 lx (1/30 s, 50%, Modus "Hohe Empfindlichkeit" aus) 0,000005 lx (1/4 Sek., 1/3 Sek., 30%, Modus Hohe Empfindlichkeit Ein) |
| Modus "Hohe Empfindlichkeit" Ein/Aus | Aus |
| Empfohlene Beleuchtungsstärke | 100 lx bis 100.000 lx |
| Gewinnen Sie | Auto/Manuell (0 bis 50,0 dB (0 bis 28 Stufen)) Max. Verstärkungsgrenze (10,7 bis 50,0 dB (6 bis 28 Stufen)) |
| Weißabgleich | Auto, ATW, Innen, Außen, One Push WB, Manuell WB, Außen Auto, Natriumdampflampe (Fix/Auto/Außen Auto) |
| Modus mit großem Dynamikbereich | ein/aus |
| Verschlusszeit | 1/1 Sekunde bis 1/10000 Sekunde (22 Stufen) |
| Gegenlichtkompensation Ein/Aus | Aus |
| Bildstabilisator ein/aus/halten | Aus |
| ICR ein/aus | Aus |
| Rauschunterdrückung | ein/aus |
| Entnebeln | Ein/Aus (niedrig, mittel, hoch) |
| IR-Wärmebildkamera Spezifikation | |
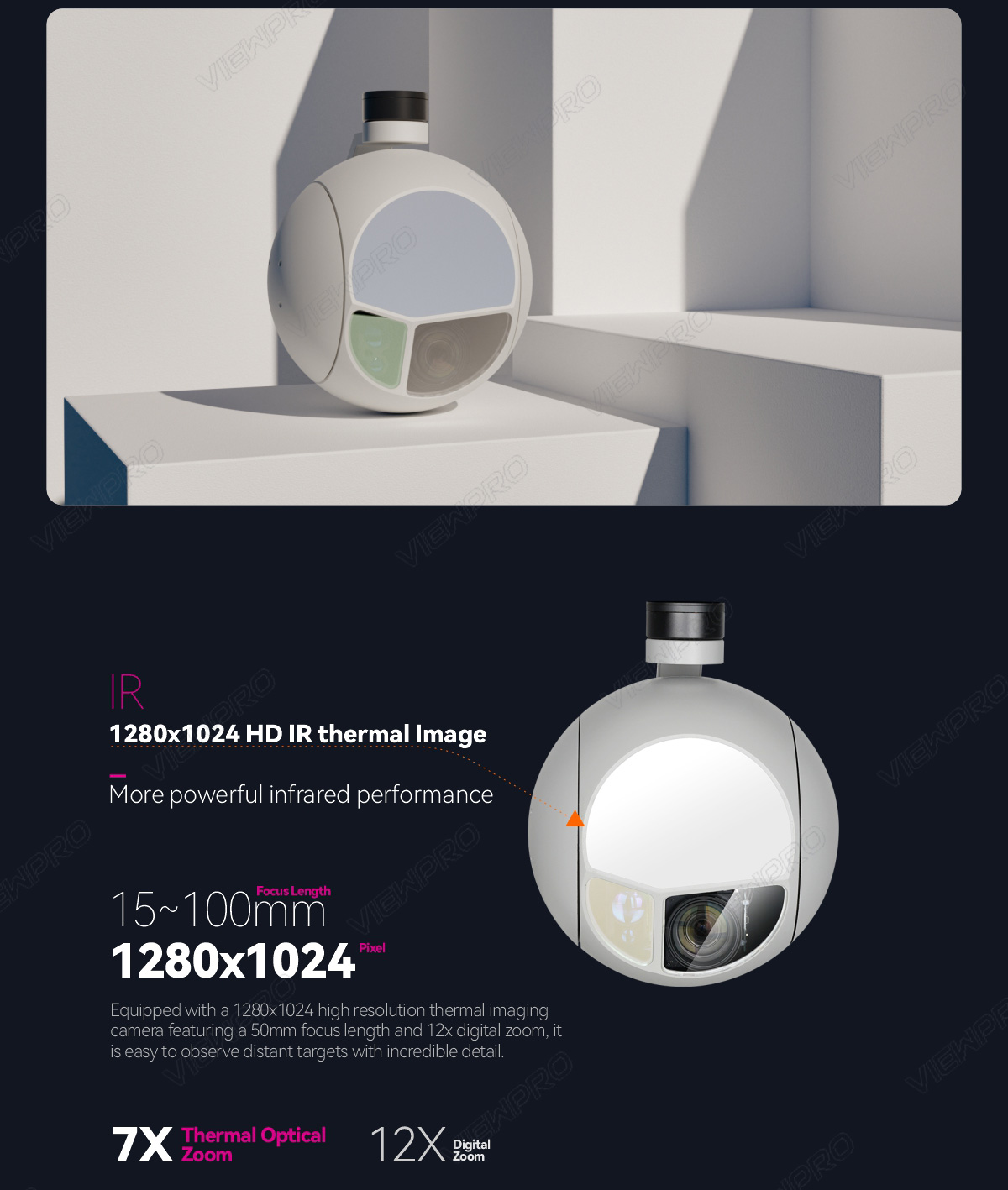
| Fokus Länge | 15~100mm |
| Horizontales FOV | 54.2°~8.8° |
| Vertikales FOV | 44.5°~7.0° |
| 15~100mm Detective Distance (Man: 1.8×0.5m) | 625~4167 meters |
| 15~100mm Recognize Distance (Man: 1.8×0.5m) | 156~1042 meters |
| 15~100mm Verified Distance (Man: 1.8×0.5m) | 78~521 meters |
| 15~100mm Detective Distance (Car: 4.2×1.8m) | 1917~12778 meters |
| 15~100mm Recognize Distance (Car: 4.2×1.8m) | 479~3194 meters |
| 15~100mm Verified Distance (Car: 4.2×1.8m) | 240~1597 meters |
| Arbeitsmodus | Ungekühlte VOx-Langwellen-Wärmebildkamera (8μm~14μm) |
| Detektor-Pixel | 1280*1024 |
| Pixelgröße | 12μm |
| Methode der Fokussierung | Athermal Prime Objektiv |
| NETD | ≤40mK@25℃,F #1.0 |
| Farbpalette | Weiß heiß, schwarz heiß, Pseudofarbe |
| Digitaler Zoom | 1x ~ 8x |
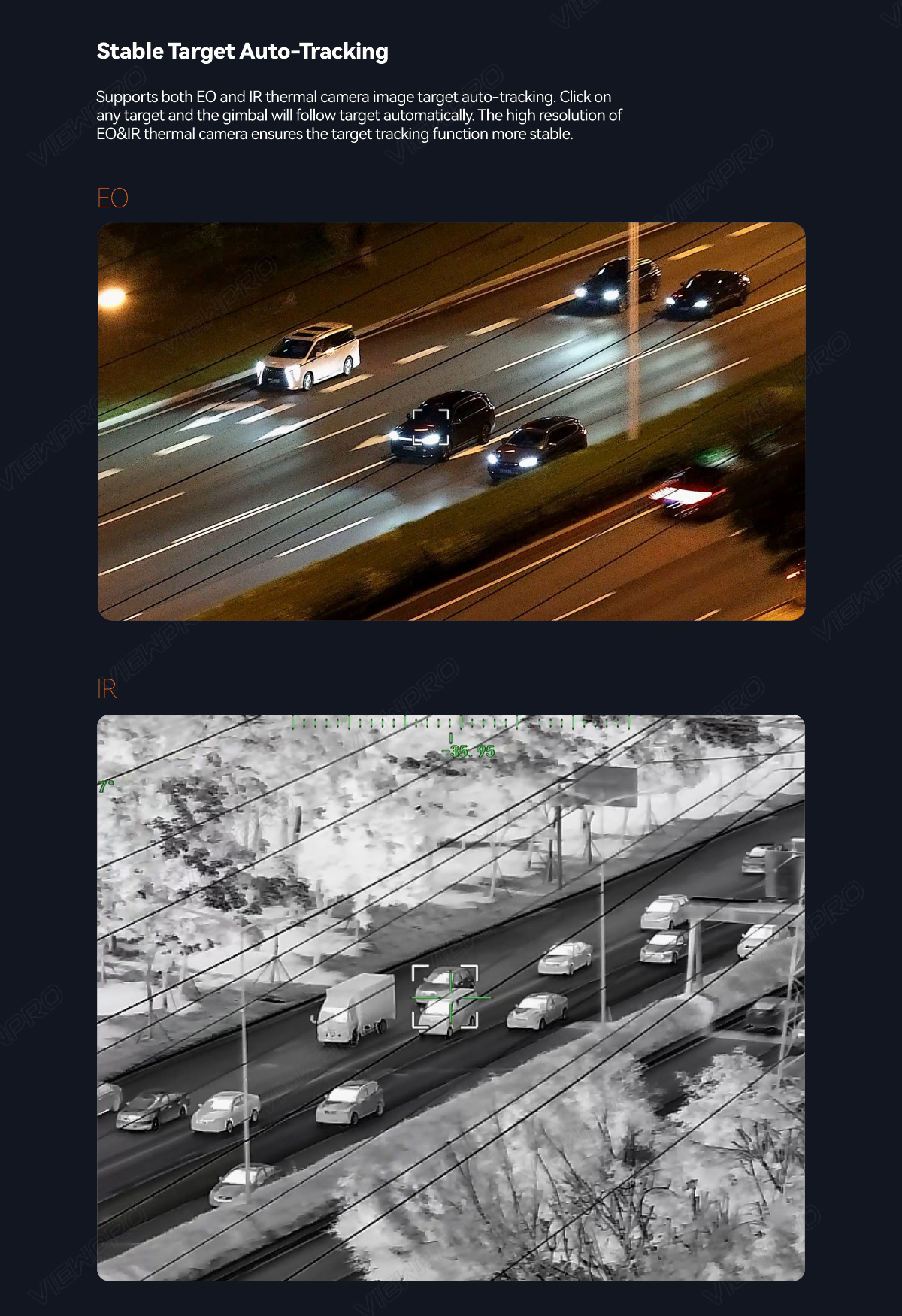
| EO / IR Kamera Objektverfolgung | |
| Aktualisierungsrate des Abweichungspixels | 50Hz |
| Ausgangsverzögerung des Abweichungspixels | 5ms |
| Minimaler Objektkontrast | 5% |
| SNR | 4 |
| Minimale Objektgröße | 32*32 Pixel |
| Maximale Objektgröße | 128*128 Pixel |
| Verfolgungsgeschwindigkeit | ±48 Pixel/Bild |
| Objektspeicherzeit | 100 Bilder (4s) |
| Die mittleren Quadratwurzelwerte des Impulsrauschens in der Objektposition | < 0,5 Pixel |
| Laser-Entfernungsmesser | |
| Bereich | 10km for big target (eg. building) ≥6km for car (2.3m×2.3m) ≥2.5km for people (1.75m×0.75m) (Based on typical value: |
| Genauigkeit | ≤2m (RMS) |
| Lichtstrahl | 1535±5nm pulse laser |
| Divergenzwinkel | ≤0.5mrad |
| Frequenz der Laserpulse | 1~10Hz |
| Min measuring range | ≤30m |
| Standort auflösen | Breitengrad und Längengrad des Ziels |
| Rangefinder | Measure the distance between the object at the center of screen and the laser rangefinder |
| Eigenschaften | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, ranging value, card recording duration, aircraft GPS and altitude or target ranging point GPS and altitude (choose one of them, and target ranging point GPS and altitude), date and time |
| Geotagging | Display time and GPS coordinate in picture exif |
| Kartenlegen online | SMB read pictures or videos / HTTP read pictures or videos |
| KLV (UDP) | Card recording or Viewlink video playback |
| ArduPilot / PX4 | Support(Mavlink protocol ) Optional: Support Ardupilot Follow me feature |
| Video switching | EO+IR /IR+EO /EO /IR |
| Dual video stream output | Not support(EO and IR two stream output) |
| Informationen zum Verpacken | |
| N.W. | 5370±20g(Viewport version with Viewport) |
| Produktbezeichnung. | 266.7*236*335.1mm(Viewport version with Viewport) |
| Zubehör | 1pc Gimbal-Kameravorrichtung, Schrauben, Kupferzylinder, Dämpfungskugeln, Dämpfungsplatten, 1pc USB zu TTL Kabel / Hochwertige Kunststoffbox mit Schaumstoffpolster |
| Gewicht | 1 kg |
|---|
Schreibe die erste Bewertung für „Q30TIRM-15100 Superior Triple Sensors 7X Optical Zoom 1280 IR Thermal STARVIS EO with 10km LRF Gimbal Camera“
Du musst angemeldet sein, um eine Bewertung abgeben zu können.
Ähnliche Produkte


Kardanische Aufhängung & Nutzlast


Kardanische Aufhängung & Nutzlast
VO-120S 3D-Schrägbildkamera für Kartierung und Vermessung mit Geo-Tagging-Funktion


Kardanische Aufhängung & Nutzlast
U30T optimiertes 2-Achsen-Kamera-Gimbal-Flugzeug VTOL und Multirotor-UAV-Nutzlast


Kardanische Aufhängung & Nutzlast
Q20KTIR 4K Kamera 20x kontinuierlicher optischer Zoom EO-IR Dual-Sensor Nachführkamera Nutzlast


Kardanische Aufhängung & Nutzlast
VOM-42 42MP Mapping Kamera für großflächige Luftbildaufnahmen


Kardanische Aufhängung & Nutzlast
Q30TM 30x Objekt-GPS-Koordinatenauflösung und LRF-Kardanische Kamera


Kardanische Aufhängung & Nutzlast
U2 Ultra Light Weight Micro Prime LensDual EO Sensors FHD 1080P Object Tracking Gimbal Kamera


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Kardanische Aufhängung & Nutzlast
Q30T Pro II Kardanische Kamera mit 30fachem optischem Zoom und Objektverfolgung
Bewertungen
Es gibt noch keine Bewertungen.