
















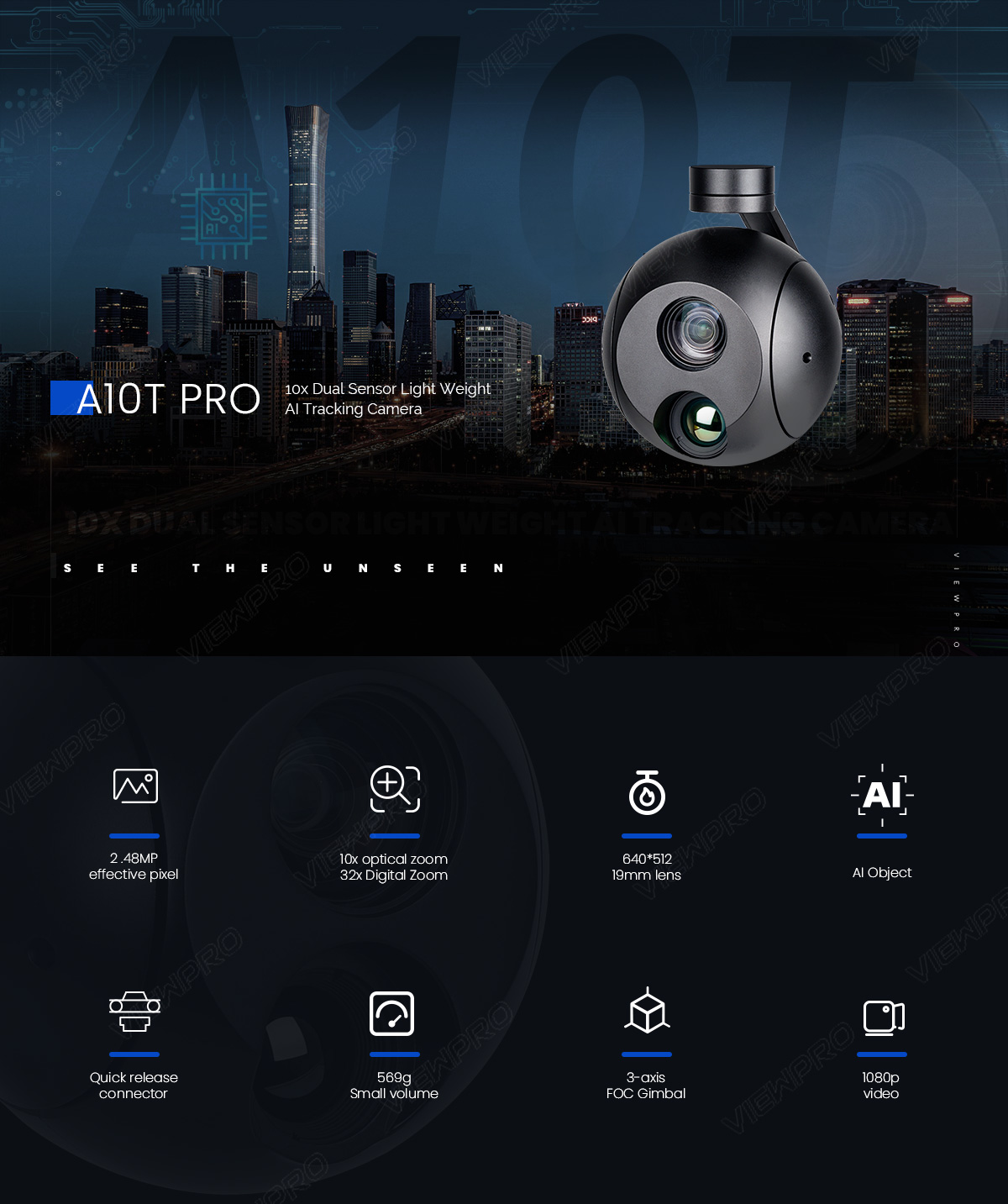
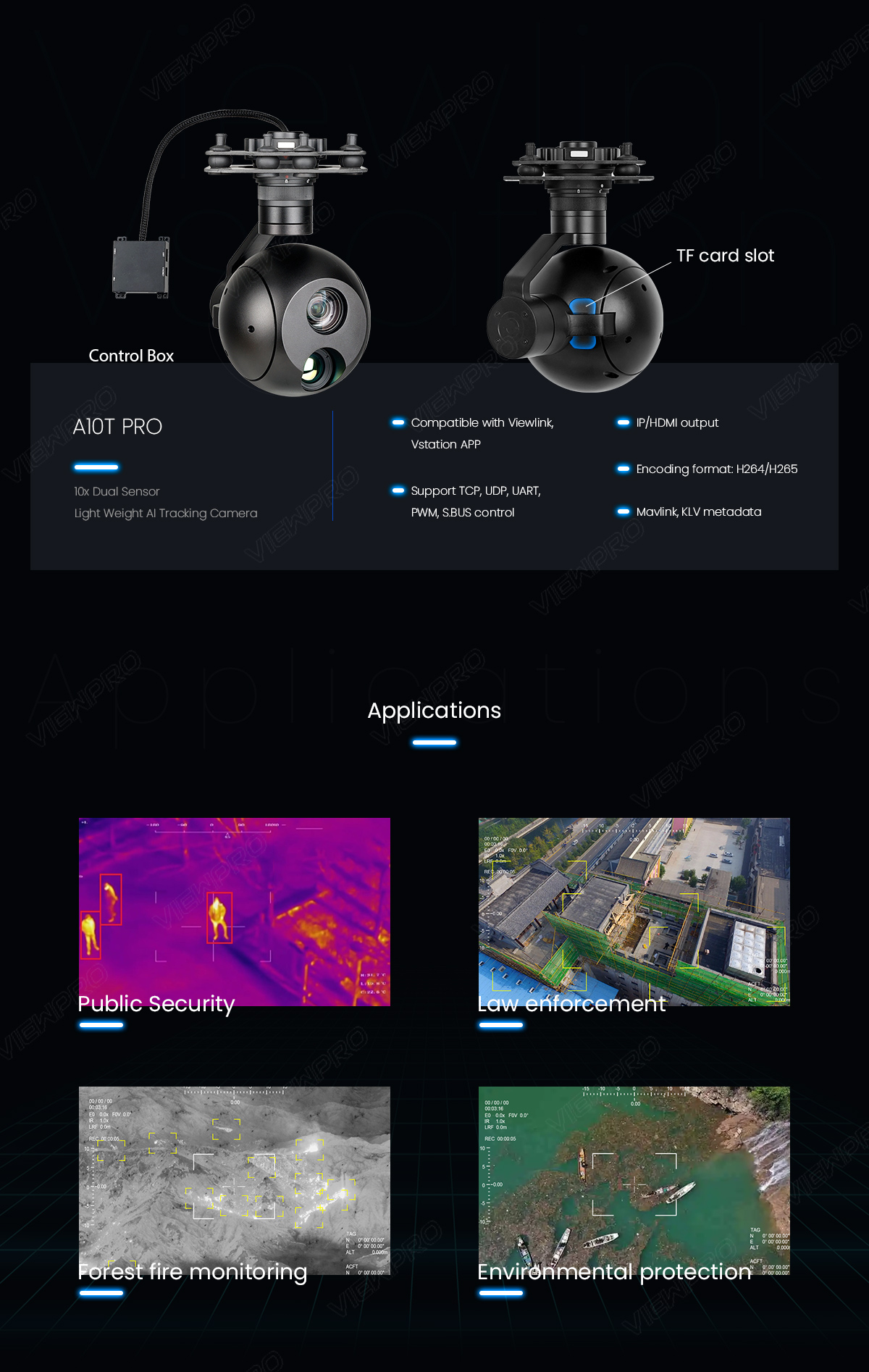
A10T Pro is a dual-sensor gimbal camera featuring 539g light net weight, small volume and compact structure, which integrates a 10x optical zoom camera and a 19mm lens 640*512 thermal camera. It with 3-axis high-precision gimbal which has advantages of better metal texture, anti-interference and better heat dissipation. It is integrated with AI object identification and tracking module, which can realize car and human automatic recognition and tracking, It widely used in UAV industries of inspection, surveillance, search and rescue and other industrial applications.




| Parámetros de hardware | |
| Tensión de trabajo | 16V |
| Tensión de entrada | 4S ~ 6S (14,8V~25,2V) |
| Tensión de salida | 5V (conectar con PWM) |
| Corriente dinámica | 700~1250mA @ 16V |
| Consumo de energía | Average 11.2W, Max 20W |
| Entorno de trabajo temp. | -20℃ ~ +50℃ |
| Salida | micro HDMI(1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Almacenamiento local | SD card (Up to 256G,class 10, FAT32) |
| Formato de almacenamiento de fotos | JPG(1920*1080) |
| Formato de almacenamiento de vídeo | MP4 (1080P 30fps) |
| Método de control | PWM / TTL / S.BUS / TCP / UDP |
| Especificaciones del cardán | |
| Ámbito angular del diseño de estructuras | Pitch/Tilt: -50°~135°, Roll: ±70°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Ámbito angular del diseño de software | Pitch/Tilt: -45°~130°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
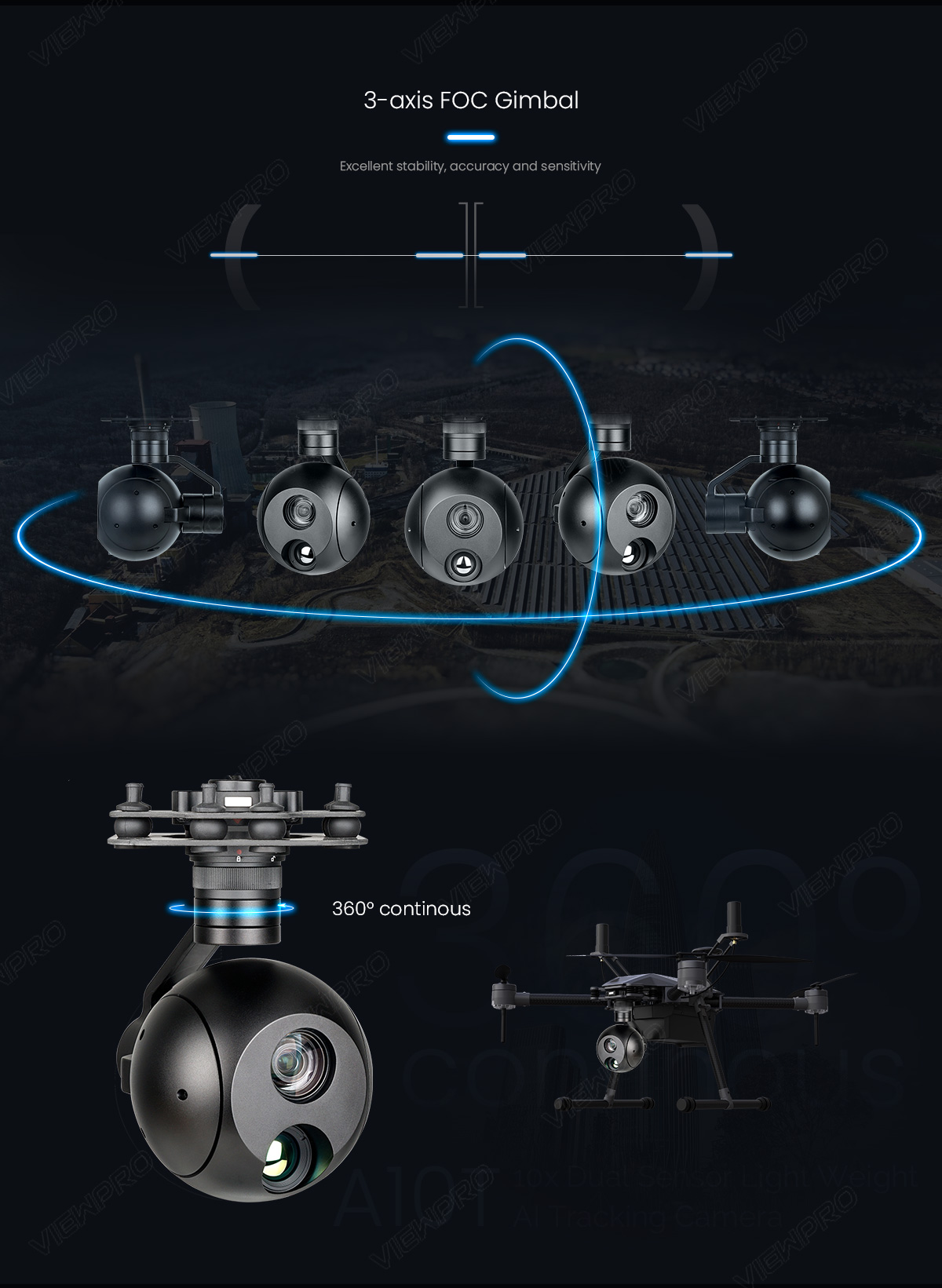
| Ángulo de vibración | Pitch/Roll/Yaw: ±0,02°. |
| Una tecla para centrar | √ |
| Especificaciones de la cámara EO | |
| Sensor de imágenes | 1/2.8″ SONY CMOS Sensor |
| Píxel total | 5.13MP |
| Calidad de imagen | Full HD 1080 (1920*1080) |
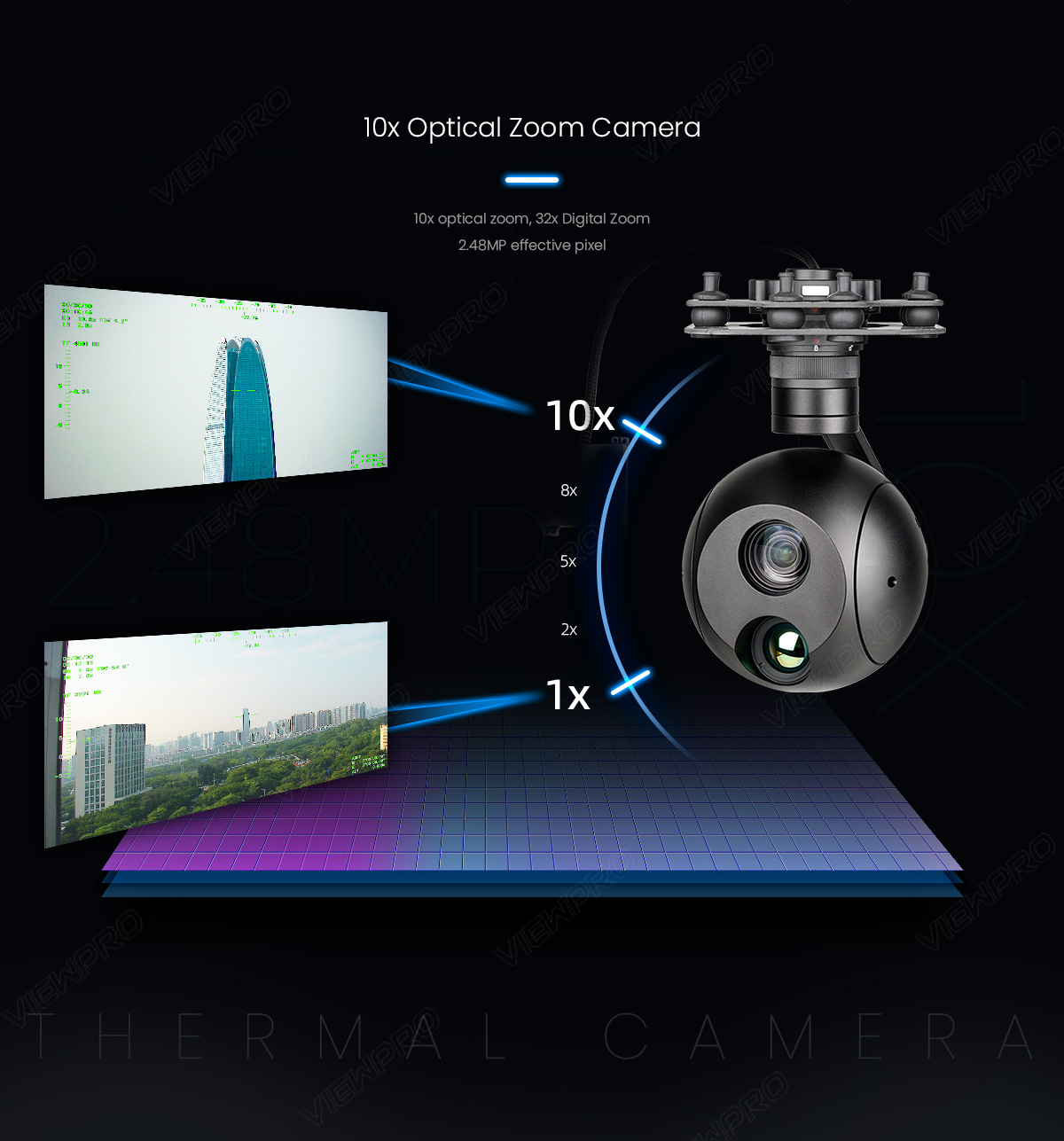
| Zoom óptico | 10x, f = 4.7mm ~ 47mm, F1.7~F3.1 |
| Zoom digital | 32x |
| Angle of View (H) | 69.9°(Wide end) ~ 8.7° (Tele end) |
| Min target distance | 0.1 / 1.5 / 3.0 / 5.0 / 10.0 m |
| Iluminación mínima | Color(1/30s, 72.0dB): 0.02 lux , BW(1/30s, 72.0dB): 0.005lux Color DSS(1/1s, 72.0dB): 0.002 lux , BW DSS(1/1s, 72.0dB): 0.0005 lux |
| Balance de blancos | Auto / One Push / Manual / Interior / Exterior |
| Velocidad de obturación | 1/1sec ~ 1/100,000 sec |
| Enfoque | Auto / One Push / Manual |
| Exposición | Auto / Manual / Priority Mode (Shutter priority & aperture priority) |
| Compensación de contraluz | Sí |
| Auto ICR | Sí |
| Image stabilization | Sí |
| Desempañar | Sí |
| Especificaciones de la cámara termográfica IR | |
| Longitud de enfoque | 19 mm |
| FOV horizontal | 22.9° |
| FOV vertical | 18.4° |
| FOV diagonal | 29.0° |
| Distancia de detección (Hombre: 1,8×0,5 m) | 792 metros |
| Reconocer distancia (Hombre: 1,8×0,5 m) | 198 metros |
| Distancia verificada (Hombre: 1,8×0,5 m) | 99 metros |
| Distancia de detección (coche: 4,2×1,8 m) | 2428 metros |
| Reconocer la distancia (Coche: 4,2×1,8 m) | 607 metros |
| Distancia verificada (coche: 4,2×1,8 m) | 303 metros |
| Modo de trabajo | Cámara termográfica VOx de onda larga no refrigerada (8μm~14μm) |
| Píxel detector | 640*512 |
| Tamaño de píxel | 12μm |
| Método de enfoque | Objetivo de focal fija atérmico |
| NETD | ≤50mK@25℃, F#1.0 (<=40mk Opcional) |
| Paleta de colores | Blanco, rojo hierro, pseudocolor |
| Zoom digital | 1x~4x continuous zoom ( step length 0.1) |
| Radiometric function(optional) | Opcional (-20℃~+150℃, +100℃~+550℃) |
| EO / IR Camera Object Tracking | |
| Tasa de actualización del píxel de desviación | 30 Hz |
| Retardo de salida del píxel de desviación | <30ms |
| Contraste mínimo del objeto | 5% |
| SNR | 4 |
| Tamaño mínimo del objeto | 16*16 píxeles |
| Tamaño máximo del objeto | 256*256 píxeles |
| Velocidad de seguimiento | ±48 píxeles/fotograma |
| Tiempo de memoria del objeto | 100 cuadros |
| Rendimiento de la IA de la cámara EO | |
| Tipo de objetivos | Coche y humano |
| Cantidad de detección simultánea | ≥ 10 objetivos |
| Relación de contraste mínima | 5% |
| Tamaño mínimo del objetivo | 5×5 píxeles |
| Índice de detección de coches | ≥85% |
| Tasa de falsas alarmas | ≤10% |
| Características | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, target ranging point GPS and altitude, date and time |
| Geotagging | Muestra la hora y las coordenadas GPS en la imagen exif |
| Lectura de cartas en línea | HTTP read pictures or videos |
| KLV (UDP) | Grabación con tarjeta o reproducción de vídeo Viewlink |
| ArduPilot / PX4 | Soporte (protocolo Mavlink) Optional: Support Ardupilot Follow me feature |
| Cosido de vídeo | EO+IR /IR+EO /EO /IR |
| Dual video stream output (optional) | Support(EO and IR two stream output, notes: unable to record once the dulal video stream output activated) |
| Información sobre el embalaje | |
| N.O. | 745±10g(Viewport version with Viewport) |
| Producto meas. | 121.5*96*161.6mm / 121.5*96*167.3mm(Viewport Version) |
| Accesorios | 1pc gimbal camera device, screws, USB to TTL cable / Hight quality box with foam cushion |
| G.W. | 1815g |
| Paquete meas. | 300*250*200mm |
| Peso | 1 kg |
|---|
Sé el primero en valorar “A10T Pro 10x Dual Sensor Light Weight AI Tracking Camera”
Debes acceder para publicar una valoración.
Productos relacionados




Cardanes y carga útil


Cardanes y carga útil


Cardanes y carga útil




Cardanes y carga útil
Q30TIRM Pro 30x Zoom EO/IR 3KM Telémetro Láser de Alto Nivel Cámara de Seguimiento de Objetos


Cardanes y carga útil
U7DER /U7DE Micro Prime Lens Dual EO/IR Cámara Gimbal de Seguimiento de Objetos para Vigilancia


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Valoraciones
No hay valoraciones aún.