
























| Parámetros de hardware | |
| Tensión de trabajo | 16V |
| Tensión de entrada | 4S ~ 6S (14,8V~25,2V) |
| Tensión de salida | 5V (conectar con PWM) |
| Corriente dinámica | 800~1500mA @16V |
| Consumo de energía | Media 12,8 W, máxima 24 W |
| Entorno de trabajo temp. | -20℃ ~ +50℃ |
| Salida (opcional) | IP (RTSP/UDP 720p/1080p 25fps/30fps H264/H265) / SDI (1080P 30fps) |
| Almacenamiento local | Tarjeta TF (hasta 512 G, clase 10, formato FAT32) |
| Formato de almacenamiento de imágenes en tarjeta TF | JPG(1920*1080) |
| Formato de almacenamiento de vídeo en tarjeta TF | MP4(1080P 30fps) |
| Método de control | PWM / TTL / S.BUS / TCP / UDP |
| Especificaciones del cardán | |
| Gama mecánica | Pitch/Tilt: -60°(Arriba)~130°(Abajo), Roll: ±70°, Yaw/Pan: ±360°*N |
| Alcance controlable | Pitch/Tilt: -45°~125°, Yaw/Pan: ±360°*N |
| Ángulo de vibración | Pitch/Roll/Yaw: ±0,02°. |
| Una tecla para centrar | √ |
| Especificaciones de la cámara EO | |
| Sensor de imágenes | Sensor CMOS Sony de 1/2,8 |
| Calidad de imagen | Full HD 1080 (1920*1080) |
| Píxel efectivo | 2,13 MP |
| Zoom óptico del objetivo | 40x, F=4,25~170mm |
| Zoom digital | Apagado / MAX x2 ~ x32 |
| Distancia mínima del objeto | 0.1 / 1.5 / 3.0 / 5.0 / 10.0 m |
| Ángulo de visión (D, H, V) | Ancho: 73,80° / 66,35° / 39,98°. |
| Tele: 2,16° / 1,90° / 1,11° | |
| Modo AF | Auto / One Push / Manual |
| Iris | Cerrar ~ F1.6 |
| Velocidad de obturación | 1/1 ~ 1/30.000 seg. |
| Sistema Sync | Interno |
| Relación S/N | más de 50 dB |
| Iluminación mínima | Color(1/30s, 79,5dB) : 0,01 lux , BW(1/30s, 79,5dB) : 0,002 lux |
| Color DSS(1/1s, 79.5dB) : 0,001 lux , BW DSS(1/1s, 79,5dB) : 0,0002 lux | |
| Control de la exposición | Auto / Iris. Prioridad / Cerrar. Prioridad / Manual |
| Control de ganancia (AGC) | 0 ~ 10 pasos |
| Balance de blancos | Auto / One Push / Manual / Interior / Exterior |
| Luz de fondo | Apagado / BLC / HLC / WDR |
| Desempañar | Apagado / Manual / Auto |
| Especificaciones de la cámara termográfica IR | |
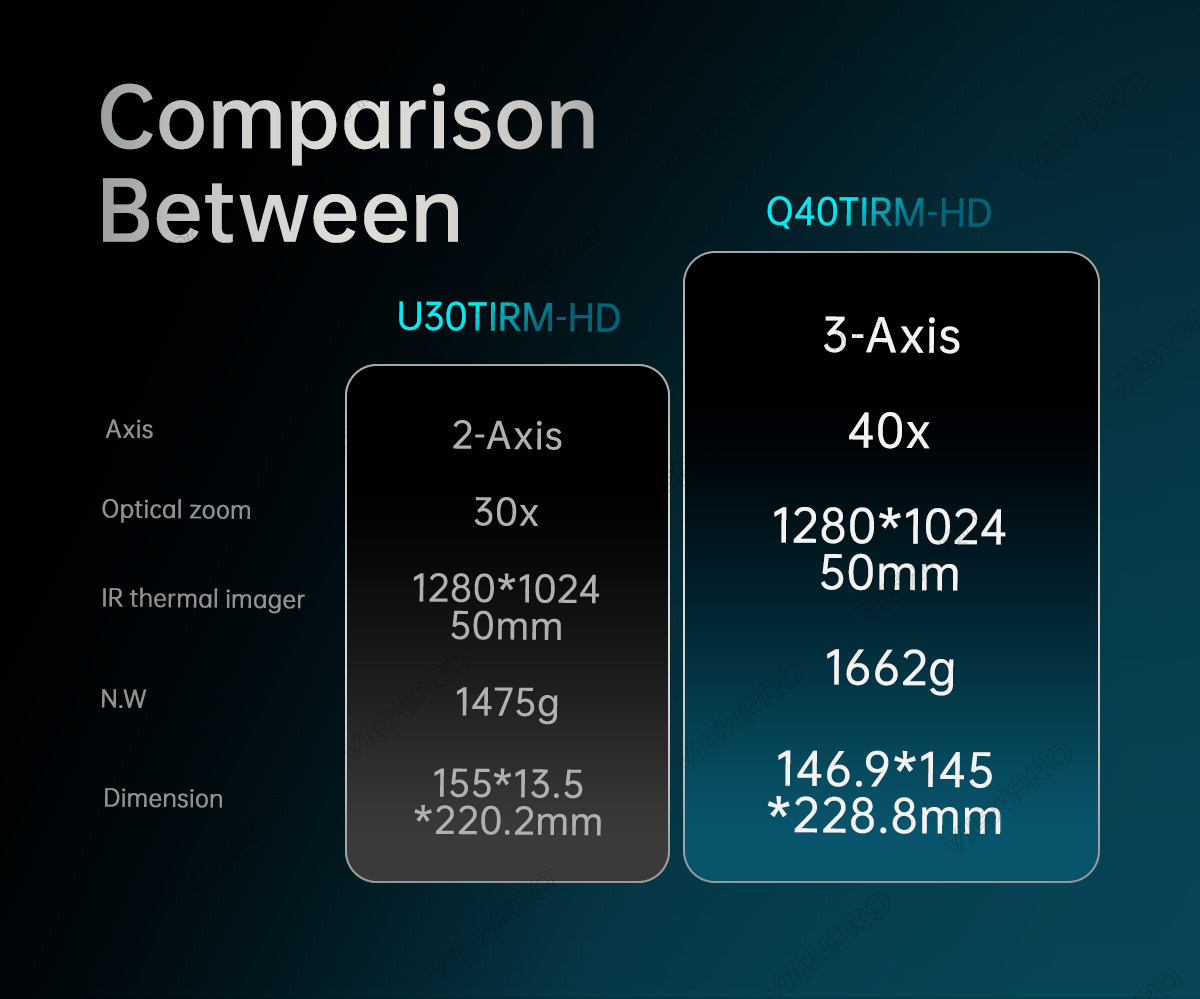
| Longitud de enfoque | 50 mm |
| FOV horizontal | 17.5° |
| FOV vertical | 14.0° |
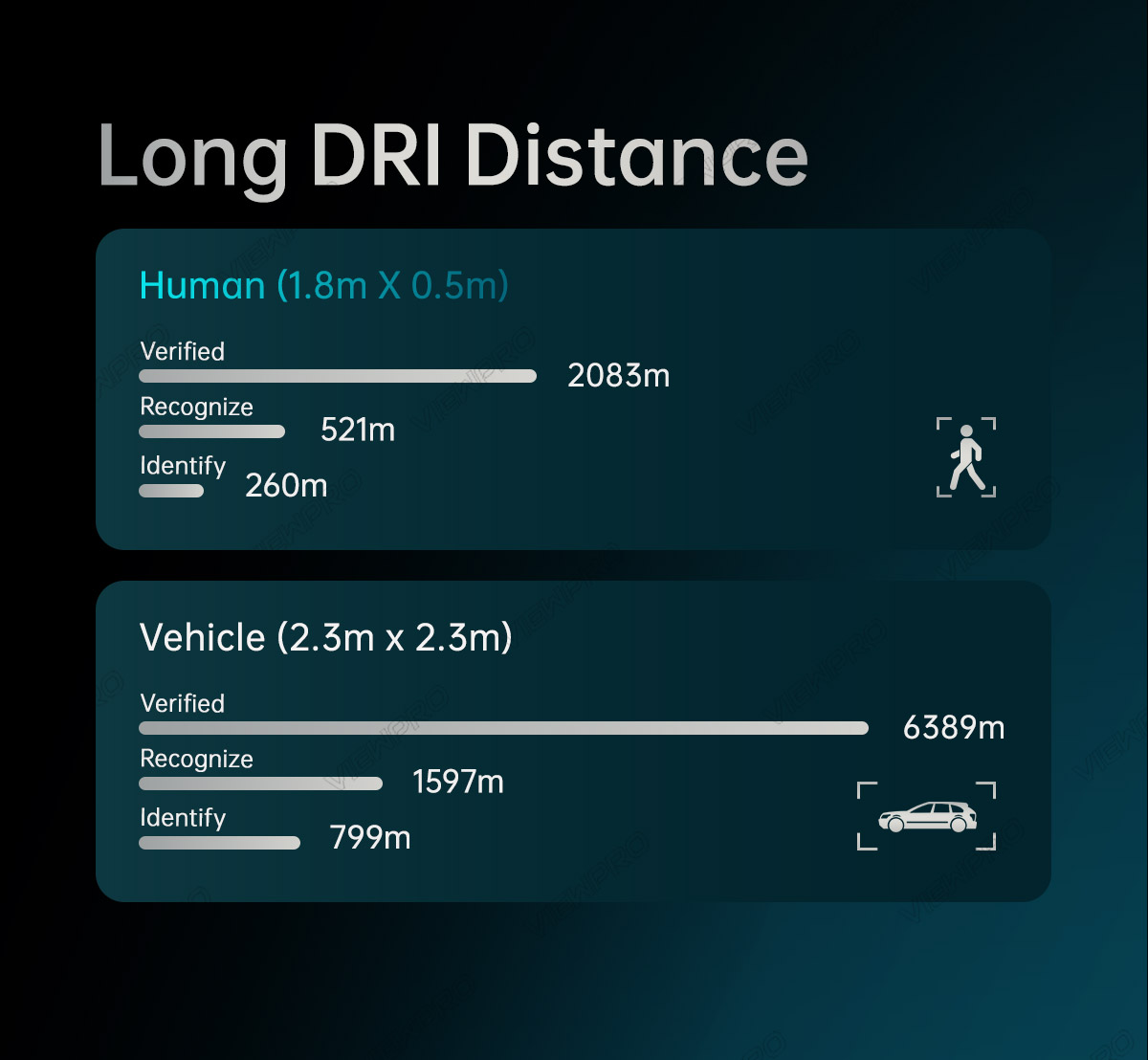
| Distancia de detección (Hombre: 1,8×0,5 m) | 2083 metros |
| Reconocer distancia (Hombre: 1,8×0,5 m) | 521 metros |
| Distancia verificada (Hombre: 1,8×0,5 m) | 260 metros |
| Distancia de detección (coche: 4,2×1,8 m) | 6389 metros |
| Reconocer la distancia (Coche: 4,2×1,8 m) | 1597 metros |
| Distancia verificada (coche: 4,2×1,8 m) | 799 metros |
| Modo de trabajo | Cámara termográfica de onda larga no refrigerada (8μm~14μm) |
| Píxel detector | 1280*1024 |
| Paso de píxeles | 12μm |
| Método de enfoque | Objetivo de focal fija atérmico |
| NETD | ≤40mK@25℃,F #1.0 |
| MRTD | ≤400mK@25℃,F #1.0 |
| Persiana | Persiana biestable |
| Paleta de colores | Blanco, negro, pseudocolor |
| Zoom digital | 1x ~ 4x |
| Tipo de termometría | No se admite |
| Cámara EO / IR Seguimiento de objetos | |
| Tasa de actualización del píxel de desviación | 50 Hz |
| Retardo de salida del píxel de desviación | 5 ms |
| Contraste mínimo del objeto | 5% |
| SNR | 4 |
| Tamaño mínimo del objeto | 32*32 píxeles |
| Tamaño máximo del objeto | 128*128 píxeles |
| Velocidad de seguimiento | ±48 píxeles/fotograma |
| Tiempo de memoria del objeto | 100 fotogramas (4s) |
| Los valores de la raíz cuadrada media del ruido de impulsos en la posición del objeto | < 0,5 píxel |
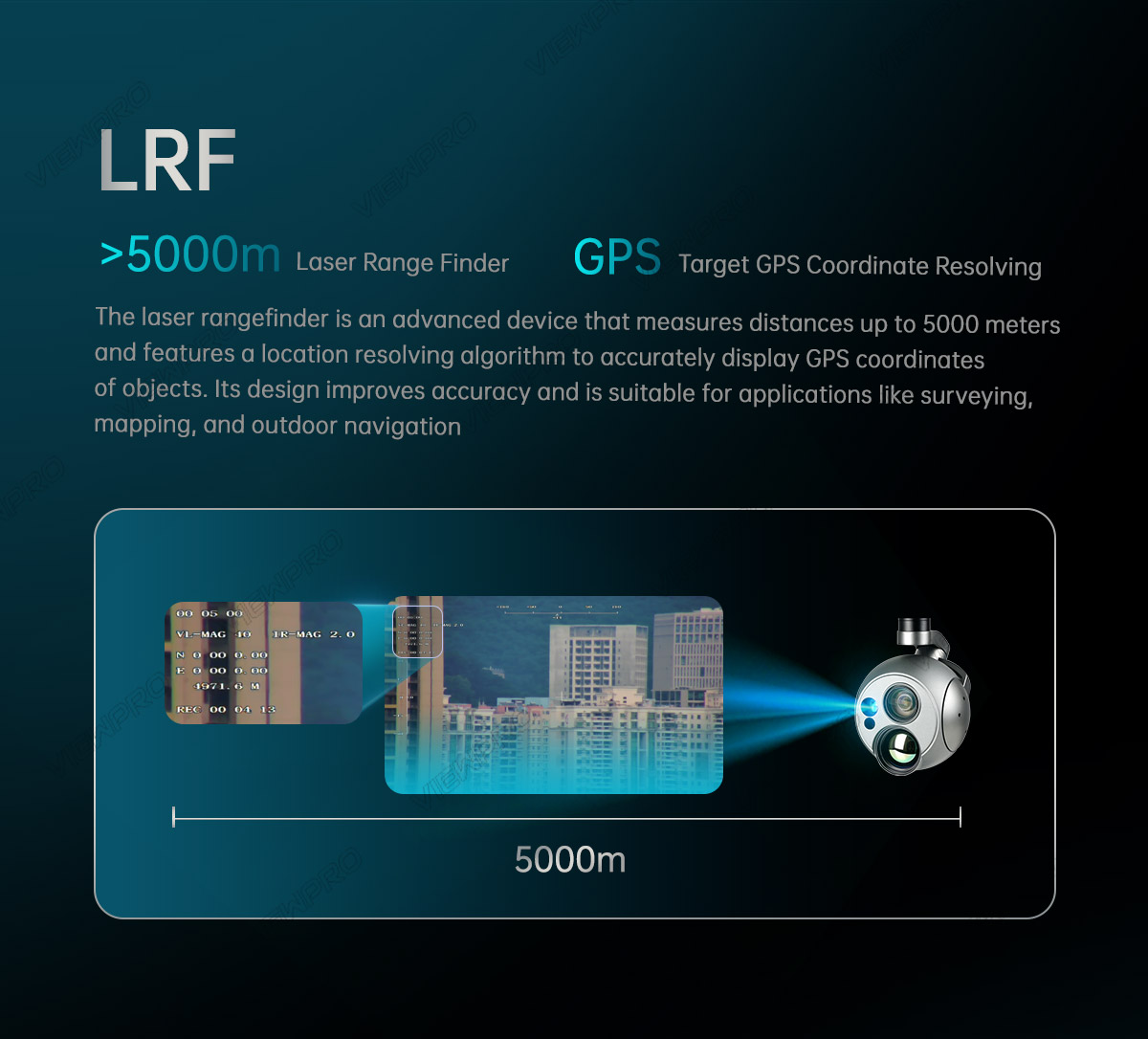
| Telémetro láser IR | |
| Medir la capacidad | ≥5km para objetivos grandes (ej. edificios) ≥3km para coche(2,3m×2,3m ) ≥1,5km para personas(1,75m×0,75m ) (Basado en el valor típico: |
| Precisión (valor típico) | ≤ ±1m (RMS) |
| Longitud de onda | Láser de pulso de 1535 nm |
| Ángulo divergente | ≤ 0,5mrad |
| Frecuencia de medición | 1~10HZ |
| Rango de medición mínimo | ≤20m |
| Localización Resolución | Latitud y longitud del objetivo |
| Ranefinder | Medir la distancia entre el objeto en el centro de la pantalla y el telémetro láser |
| Características | |
| OSD | Muestra el ángulo de guiñada y cabeceo del cardán, el aumento, el valor de alcance, la duración de la grabación de la tarjeta, el GPS y la altitud de la aeronave o el GPS y la altitud del punto de alcance del objetivo (elige uno de ellos, y el GPS y la altitud del punto de alcance del objetivo), la fecha y la hora. |
| Geotagging | Muestra la hora y las coordenadas GPS en la imagen exif |
| Lectura de cartas en línea | SMB leer imágenes o vídeos / HTTP leer imágenes o vídeos |
| KLV (UDP) | Grabación con tarjeta o reproducción de vídeo Viewlink |
| ArduPilot / PX4 | Soporte (protocolo Mavlink) Opcional: Compatible con la función Sígueme de Ardupilot |
| Cosido de vídeo | EO+IR /IR+EO /EO /IR |
| Salida de doble flujo de vídeo | No compatible (salida de dos flujos EO e IR) |
| Información sobre el embalaje | |
| N.O. | 1662±10g(versión con Viewport) |
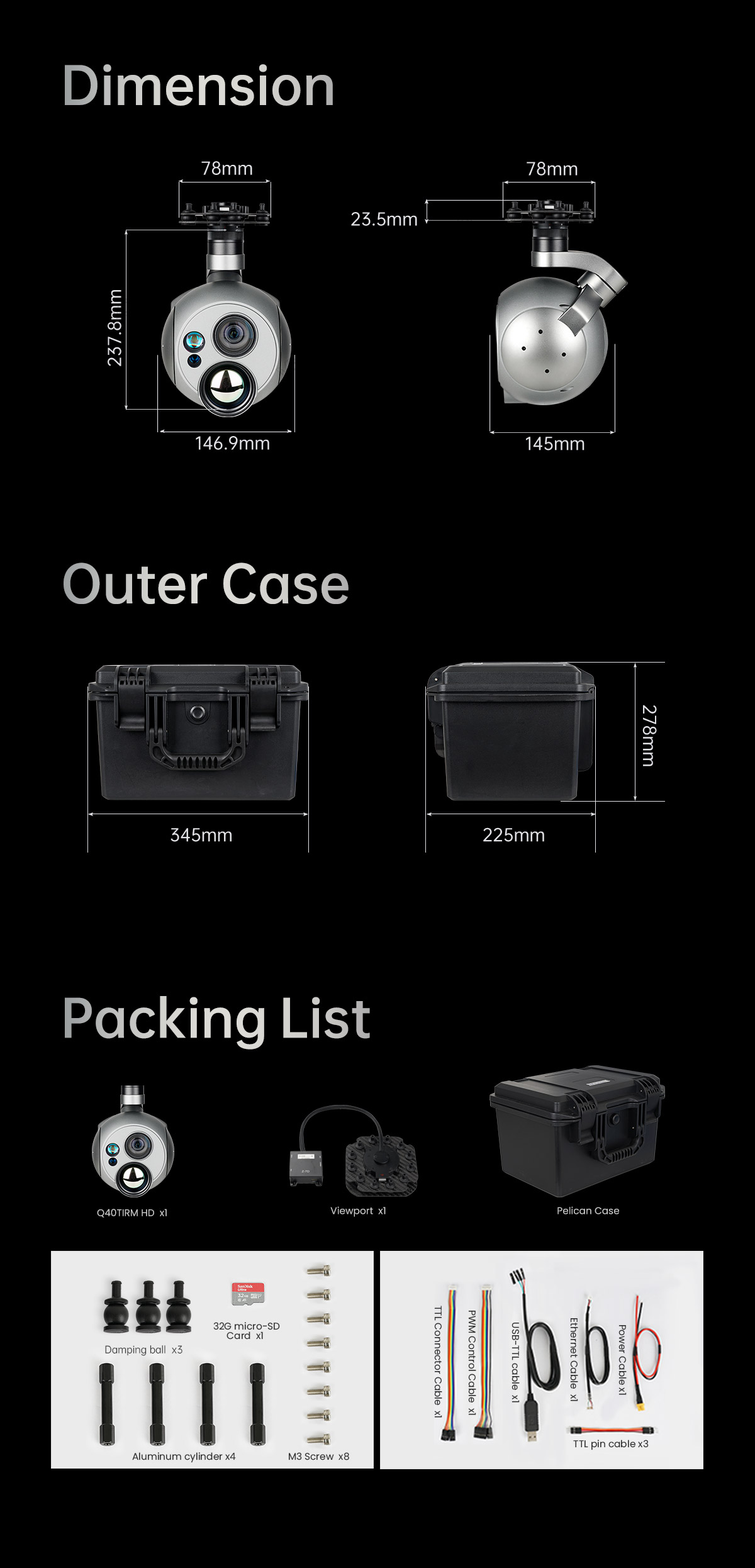
| Producto meas. | 146,9*145*228,8 mm (versión estándar) / 146,9*145*237,8 mm (versión con Viewport) |
| Accesorios | 1 dispositivo de cámara cardán, tornillos, cilindros de aluminio, bolas de amortiguación, 1 cable USB a TTL / Caja de plástico de alta calidad con almohadilla de espuma |
| G.W. | Acerca de 3389g |
| Paquete meas. | 350*300*250mm |
| Peso | 1 kg |
|---|
Sé el primero en valorar “Q40TIRM-HD Gimbal Camera 40X Optical Zoom Triple Sensors High Resolution Super Visible Thermal 5km LRF”
Debes acceder para publicar una valoración.
Productos relacionados


Cardanes y carga útil
€0.00


Cardanes y carga útil
€4,499.00




Cardanes y carga útil
Q20KTIR Pro Cámara giroestabilizada de alta resolución IR EO de doble sensor y 3 ejes
€0.00


Cardanes y carga útil
VO305 UH Definición Cámara oblicua 3D UAV Cartografía y topografía aérea
€44,599.99




Cardanes y carga útil
Q40TIR Cámara térmica de seguimiento 4K de alta resolución con zoom 40x y 50 mm y sensor IR doble
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cardanes y carga útil
Hawkeye serie U818 Micro Prime Lens Cámara de seguimiento de doble sensor para la vigilancia
€0.00
Valoraciones
No hay valoraciones aún.