



















| Paramètres du matériel | |
| Tension de fonctionnement | 16V |
| Tension d'entrée | 4S ~ 6S (14,8V~25,2V) |
| Courant dynamique | 450~750mA @ 16V |
| Consommation électrique | Average 7.2W, Max 12W |
| Environnement de travail temp. | -20℃ ~ +50℃ |
| Sortie | IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Stockage local | Carte SD (jusqu'à 256G, classe 10, FAT32) |
| Format de stockage des photos | JPG (1920*1080) |
| Format de stockage vidéo | MP4 (1080P 30fps) |
| Méthode de contrôle | TTL ou S.BUS (choisir l'un des deux, et TTL par défaut), et TCP/UDP |
| Spécifications du cardan | |
| Gamme mécanique | Pitch/Tilt: -48°(Up)~125°(Down), Roll: ±60°, Yaw/Pan: ±150° |
| Gamme contrôlable | Pitch/Tilt: -45°~120°, Yaw/Pan: ±145° |
| Angle de vibration | Tangage, roulis et lacet : ±0,02°. |
| Une seule touche pour centrer | √ |
| Spécifications de la caméra EO | |
| Capteur d'image | Capteur CMOS 1/2,9 |
| Pixel de l'image | 2MP |
| Qualité de l'image | Full HD 1080 (1920*1080) |
| Lentille | Focus Length 6mm |
| Zoom numérique | 1x~12x |
| Angle de vue (D,H,V) | FOV:D 60° H 50° V 28° |
| Spécifications de l'imageur thermique IR | |
| Longueur de mise au point | 13mm |
| Ouverture | F1.2 |
| FOV horizontal | 33° |
| FOV vertical | 26° |
| Distance de détection (homme : 1,8×0,5m) | 542 meters |
| Reconnaître la distance (Homme : 1.8×0.5m) | 135 meters |
| Distance vérifiée (homme : 1,8×0,5m) | 68 meters |
| Distance de détection (voiture : 4,2×1,8m) | 1661 meters |
| Reconnaître la distance (voiture : 4,2×1,8m) | 415 meters |
| Distance vérifiée (voiture : 4,2×1,8m) | 208 meters |
| Mode de travail | Imageur thermique VOx à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*512 |
| Taille du pixel | 12μm |
| Méthode de mise au point | Lentille primaire athermique |
| NETD | ≤[email protected] @25℃ |
| Palette de couleurs | Blanc, noir, pseudo-couleur |
| Zoom numérique | 1x~8x |
| Fonction radiométrique (en option) | Thermometry range optional:-20℃~+150℃, +100℃~+550℃ |
| Thermometry accuracy: ±3℃ or +3%(take larger value)@ambient temperature -20℃~+60℃ | |
| Suivi d'objets par les caméras EO / IR | |
| Taux de mise à jour du pixel de déviation | 30Hz |
| Retard de sortie du pixel de déviation | <30ms |
| Contraste minimal de l'objet | 5% |
| SNR | 4 |
| Taille minimale de l'objet | 16*16 pixels |
| Taille maximale de l'objet | 256*256 pixels |
| Vitesse de suivi | ±48 pixels/image |
| Durée de la mémoire des objets | 100 cadres |
| Performances de la caméra EO/IR en matière d'intelligence artificielle | |
| Type de cible | La voiture et l'homme |
| Quantité de détection simultanée | ≥ 10 cibles |
| Rapport de contraste minimal | 5% |
| Taille minimale de l'objectif | 5×5 pixels |
| Taux de détection des voitures | ≥85% |
| Taux de fausses alarmes | ≤10% |
| Caractéristiques | |
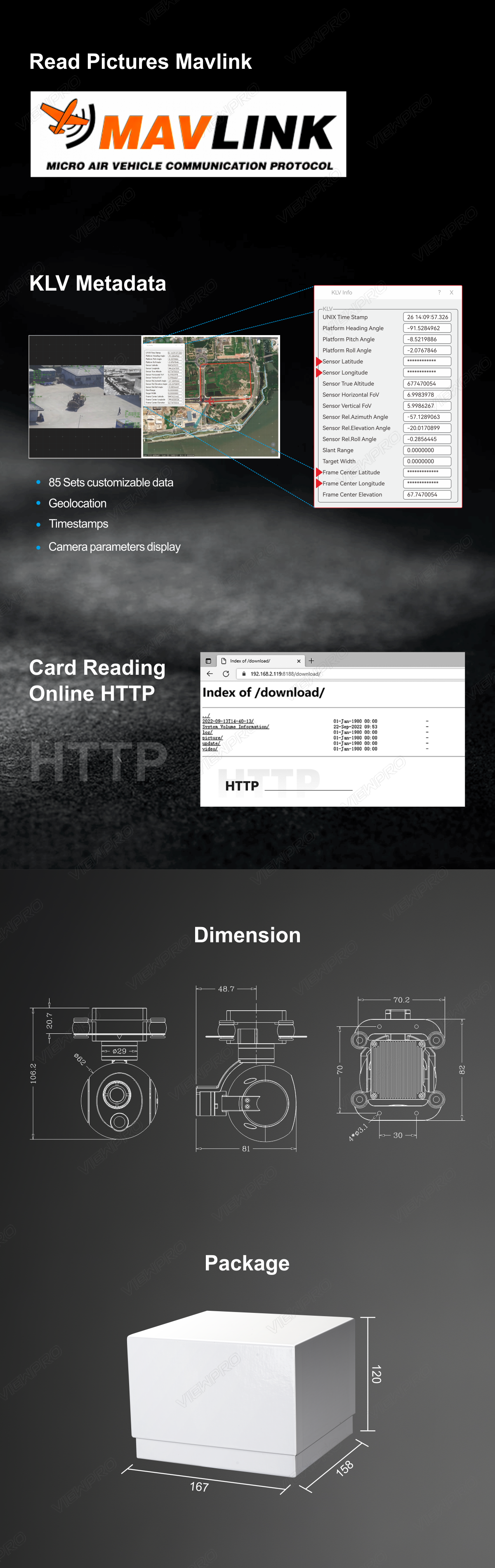
| OSD | Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, date and time |
| Géolocalisation | Affichage de l'heure et des coordonnées GPS dans l'image exif |
| Lecture de cartes en ligne | HTTP lire des images ou des vidéos |
| KLV (UDP) | Enregistrement sur carte ou lecture vidéo Viewlink |
| ArduPilot / PX4 | Prise en charge (protocole Mavlink) Optionnel : Prise en charge de la fonction Follow me d'Ardupilot |
| Assemblage vidéo | EO+IR /IR+EO /EO /IR |
| Sortie double flux vidéo (en option) | Prise en charge (sortie à deux flux EO et IR, remarques : impossible d'enregistrer une fois la sortie vidéo dulal activée) |
| Informations sur l'emballage | |
| N.W. | 238±10g |
| Mesure du produit. | 81*62*106.2mm |
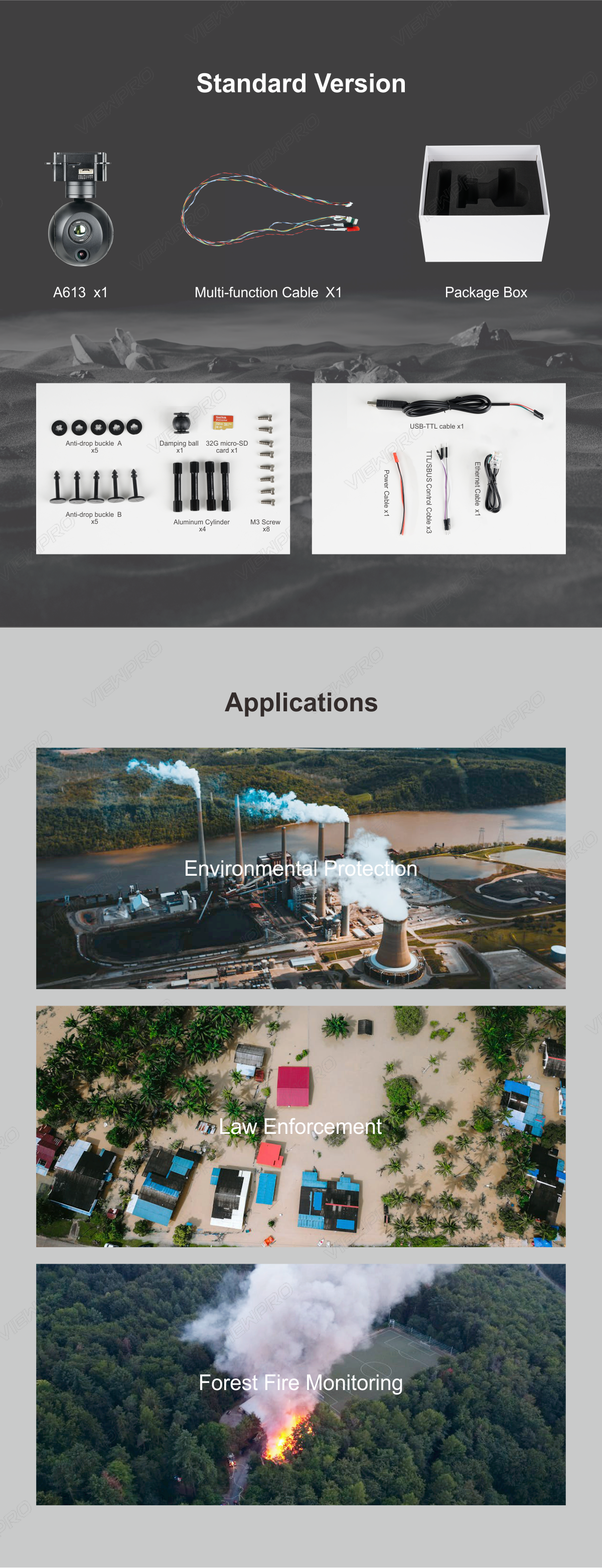
| Accessoires | vis, câble USB vers TTL, câble d'alimentation, câble multifonction, câble Ethernet, boîte de haute qualité avec coussin en mousse |
| G.W. | 610g |
| Mesure de l'emballage. | 162*132*100mm |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “A613 Mini3-AixsStabilizerPrimeLens EO/IRAITrackingThermalImagerGimbalCamera”
Vous devez être connecté pour publier un avis.
Produits similaires




Cardans et charge utile
€3,749.00


Cardans et charge utile
Hawkeye U818 série Micro Prime Lens Dual Sensor Tracking Camera for Surveillance
€0.00






Cardans et charge utile
VO305 UH Definition 3D Oblique Camera UAV Aerial Mapping and Surveying
€44,599.99


Cardans et charge utile
U2 Ultra Léger Micro Prime LensDual EO Sensors FHD 1080P Object Tracking Gimbal Camera
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cardans et charge utile
U30TIR Caméra Gimbal 30x Zoom EO+ IR à double capteur et suivi d'objet sur 2 axes
€12,449.00
Avis
Il n’y a pas encore d’avis.