






















| Paramètres du matériel | |
| Tension de fonctionnement | 16V |
| Tension d'entrée | 4S ~ 6S |
| Tension de sortie | 5V (connexion avec PWM) |
| Courant dynamique | 310mA~1600mA @ 16V |
| Environnement de travail temp. | -20℃ ~ +60℃ |
| Indice de protection IP | IP44 |
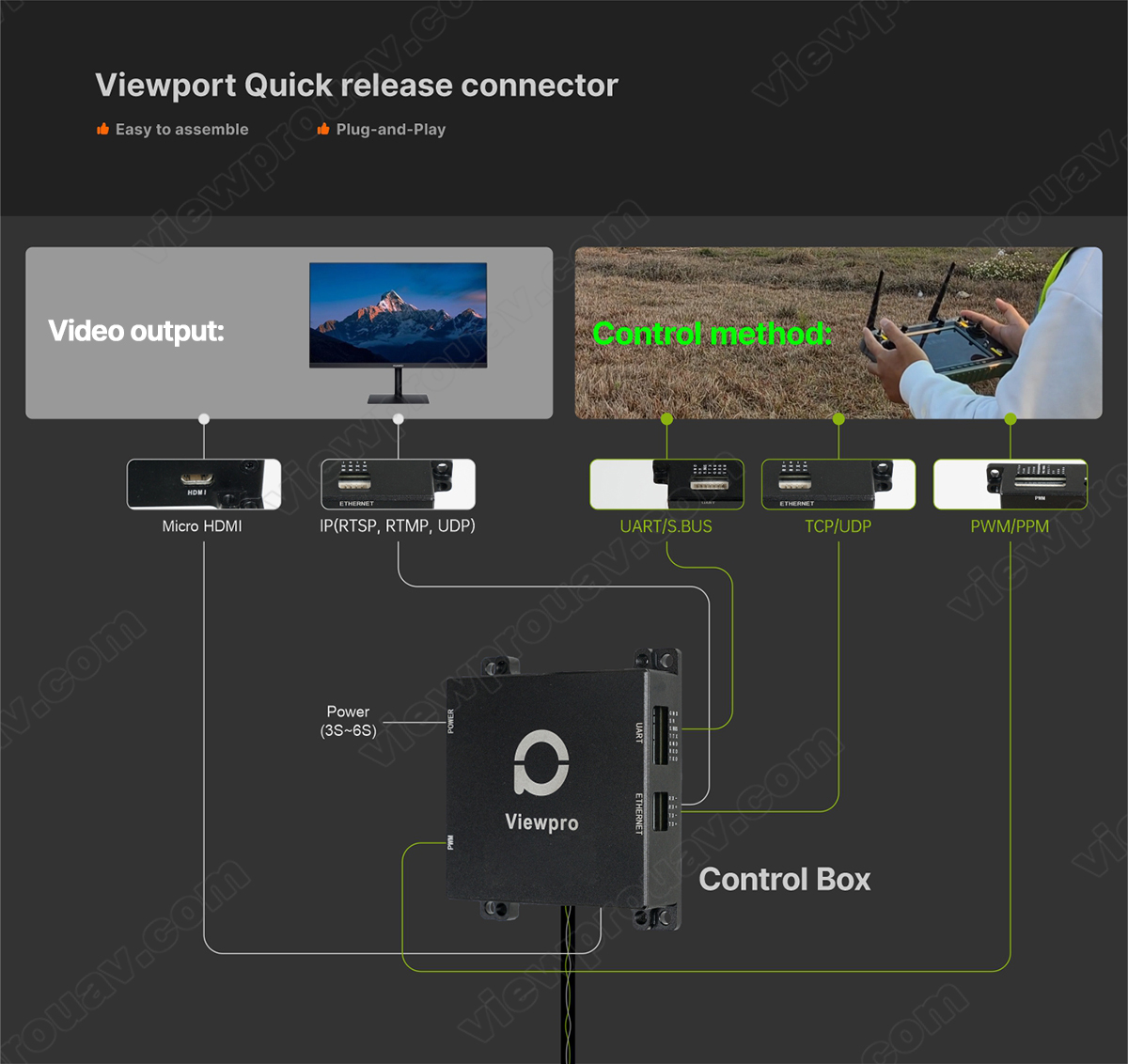
| Sortie | micro HDMI (1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps) |
| Stockage local | Carte TF (jusqu'à 128G, classe 10, format FAT32 ou ex FAT) |
| Format de stockage des photos | JPG (1920*1080) |
| Format de stockage vidéo | MP4 (1080P 30fps) |
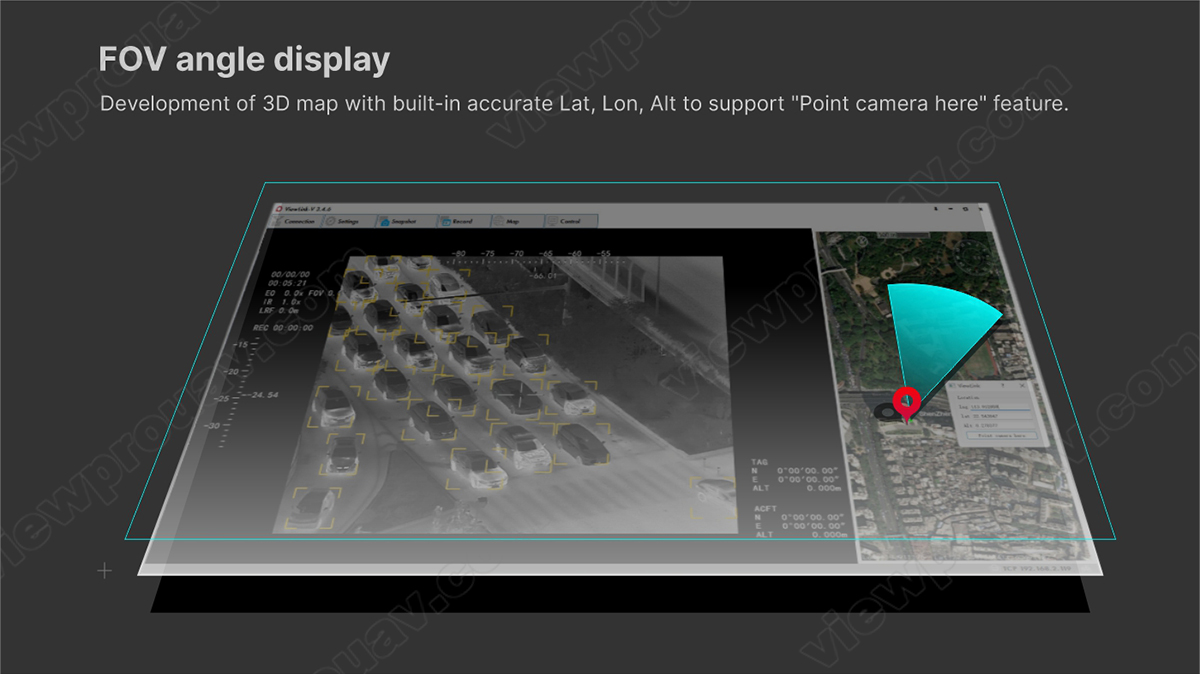
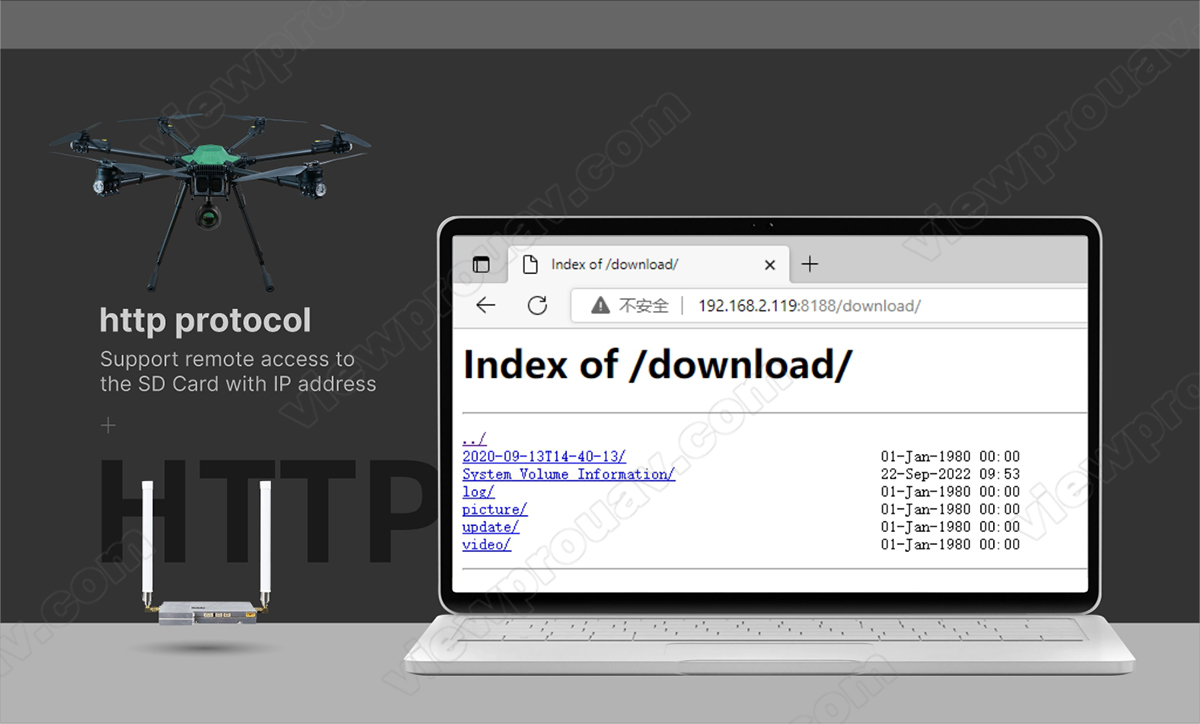
| Lecture de cartes en ligne | HTTP lire les images |
| Méthode de contrôle | PWM / TTL / S.BUS / TCP (sortie IP)/UDP (version sortie IP) |
| Géolocalisation | Prise en charge, affichage de l'heure et des coordonnées GPS dans l'image exif |
| Spécifications du cardan | |
| Gamme mécanique | Pitch/Tilt: -40°~100°, Roll: ±70°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Gamme contrôlable | Tangage/inclinaison : -35°~95°, lacet/pan : ±290° / ±360°*N (version sortie IP) |
| Angle de vibration | Tangage/roulis : ±0,02°, lacet:±0,02° |
| Une seule touche pour centrer | √ |
| Spécifications de l'imageur thermique IR | |
| Longueur de mise au point | 50 mm |
| Film d'enrobage | DLC |
| FOV horizontal | 8.8° |
| FOV vertical | 7.0° |
| Diagonale FOV | 11.2° |
| Distance de détection (homme : 1,8×0,5m) | 2083 mètres |
| Reconnaître la distance (Homme : 1.8×0.5m) | 521 mètres |
| Distance vérifiée (homme : 1,8×0,5m) | 260 mètres |
| Distance de détection (voiture : 4,2×1,8m) | 6389 mètres |
| Reconnaître la distance (voiture : 4,2×1,8m) | 1597 mètres |
| Distance vérifiée (voiture : 4,2×1,8m) | 799 mètres |
| Mode de travail | Imageur thermique VOx à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*512 |
| Pas de pixel | 12μm |
| Méthode de mise au point | Lentille primaire athermique |
| NETD | ≤[email protected] @25℃ |
| Palette de couleurs | Blanc chaud, noir chaud, pseudo-couleur |
| Zoom numérique | 1x ~ 8x |
| Synchronisation de l'heure exacte | Oui |
| Suivi d'objets par la caméra IR | |
| Taux de mise à jour du pixel de déviation | 30Hz |
| Retard de sortie du pixel de déviation | <30ms |
| Contraste minimal de l'objet | 5% |
| SNR | 4 |
| Taille minimale de l'objet | 16*16 pixels |
| Taille maximale de l'objet | 256*256 pixels |
| Vitesse de suivi | ±48 pixels/image |
| Durée de la mémoire des objets | 100 cadres |
| Performance de l'IA | |
| Type de cible | La voiture et l'homme |
| Quantité de détection simultanée | ≥ 10 cibles |
| Rapport de contraste minimal | 5% |
| Taille minimale de l'objectif | 5×5 pixels |
| Taux de détection des voitures | ≥85% |
| Taux de fausses alarmes | ≤10% |
| Informations sur l'emballage | |
| N.W. | 860g (Viewport version) |
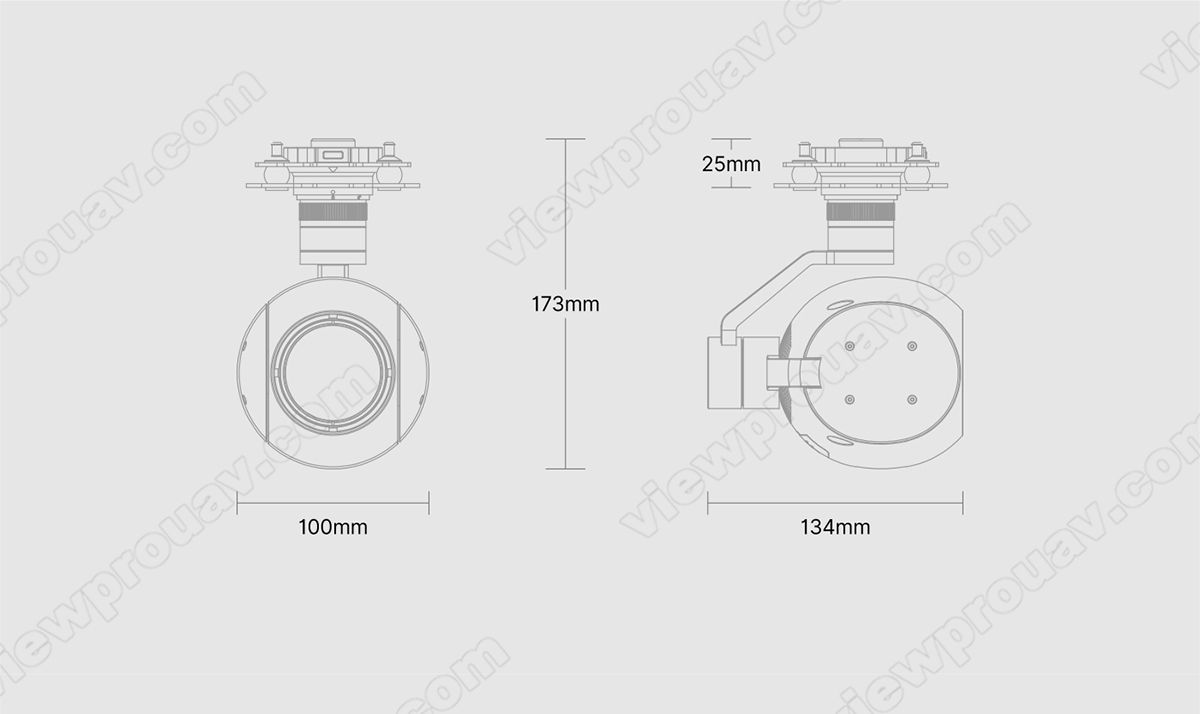
| Mesure du produit. | 134*100.8*167.5mm (Standard version) /134*100.8*173.2mm (Viewport version) |
| Accessoires | 1pc de dispositif de caméra à cardan, vis, cylindres en cuivre, boules d'amortissement, 1pc de câble USB à TTL / Boîte en plastique de haute qualité avec coussin en mousse |
| G.W. | 1969g |
| Mesure de l'emballage. | 350*300*250mm |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “AT50 50mm 640*512 IR Thermal Camera with AI Automatic Tracking and 3-Axis Gimbal”
Vous devez être connecté pour publier un avis.
Produits similaires


Cardans et charge utile
Q30TIRM Pro 30x Zoom EO/IR 3KM High-level Laser Rangefinder Object Tracking Camera
€0.00




Cardans et charge utile
VOM-42 - Caméra de cartographie 42MP pour les levés aériens sur de grandes surfaces
€0.00




Cardans et charge utile
Q40TIR Caméra de poursuite 4K à double capteur thermique IR 40x Zoom 50mm haute résolution
€0.00


Cardans et charge utile
U2 Ultra Léger Micro Prime LensDual EO Sensors FHD 1080P Object Tracking Gimbal Camera
€0.00


Cardans et charge utile
Hawkeye U818 série Micro Prime Lens Dual Sensor Tracking Camera for Surveillance
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Avis
Il n’y a pas encore d’avis.