











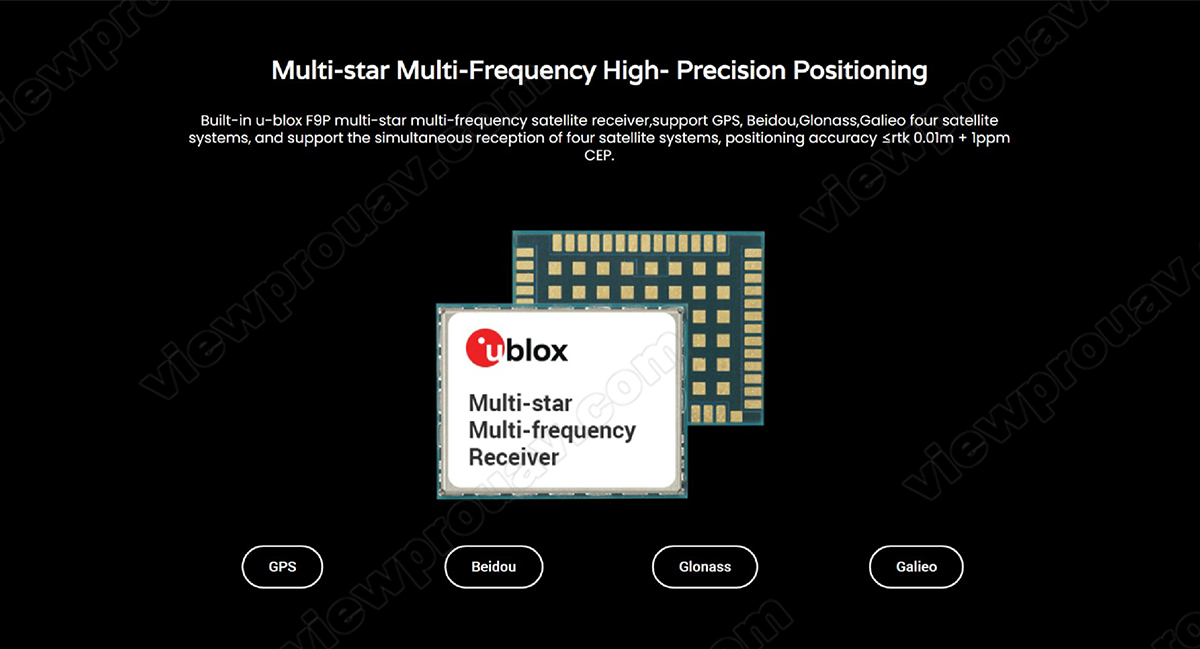










| Récepteur RTK | ZED-F9P |
| Canal de réception | 184 |
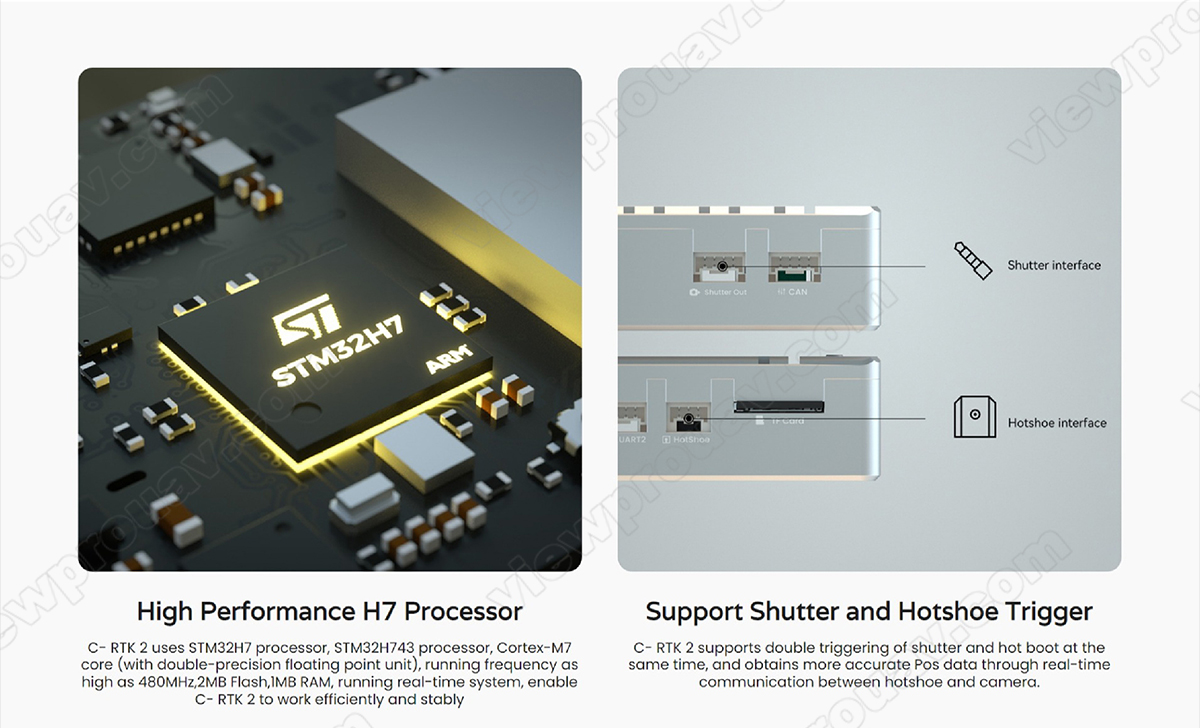
| Processeur | STM32H743VIH6 |
| Flash | 2M |
| Ram | 1M |
| Accéléromètre | ICM-20689 |
| Gyroscope | ICM-20689 |
| Boussole | RM3100 |
| Baromètre | ICP10111 |
| Carte TF | 32G(Max)) |
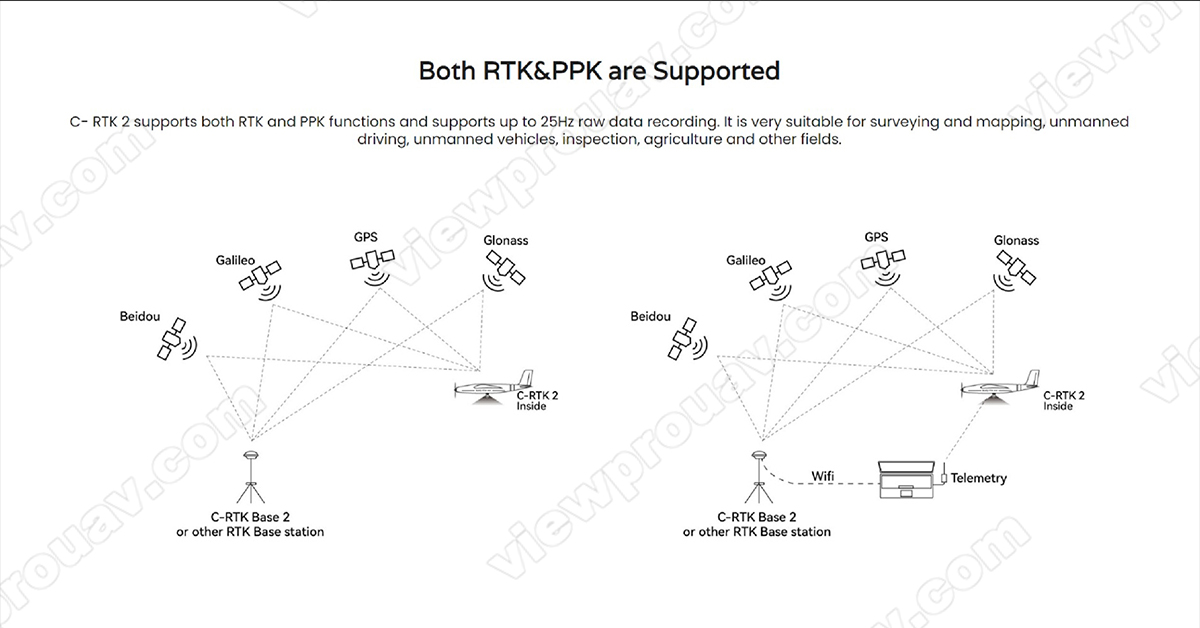
| PPK | Soutien |
| RTK | Soutien |
| Système GNSS | GPS:L1C/A,L2C GLONASS:L1OF,L2OF Galieo:E1B/C,E5b Beidou:B1l,B2l |
| Système amélioré | QZSS:L1C/A,L2C,L1S SBAS:L1C/A |
| GNSS simultané | 4 |
| Taux de navigation | RTK:20Hz(max) PPK:25HZ(max)) par défaut : 5Hz |
| Temps de convergence | RTK<10s |
| Précision (RMS) | Niveau RTK:0.01m+1ppm(RMS) RTK Vertical:0.02m+1ppm(RMS) GPS:1.5m(RMS) |
| Acquisition | Démarrage à froid:24s Démarrage à chaud:1s Reacquisition:2s |
| Sensibilité | Tracking & Nav:-167dBm Démarrage à froid:-148dBm Démarrage à chaud:-157dBm Réacquisitio:-160dBm |
| Anti-spoofng | Algorithmes avancés de lutte contre l'usurpation d'identité |
| Protocoles | UAVCAN/NMEA/UBX(RAW)/RTCM3.3 |
| Impulsion temporelle | 0.25Hz~10Mhz(Configurable)) |
| Anti-brouillage | Détection et suppression active des ondes entretenues Filtre passe-bande intégré |
| Support pour les contrôleurs de vol | Compatible avec les contrôleurs de vol utilisant le micrologiciel ArduPilot/PX4 |
| Système de coordonnées | WGS84 |
| Interface | |
| Hotshoe | 1 |
| Obturateur en place | 1 |
| Sortie de l'obturateur | 1 |
| Type C | 1(USB haute vitesse) |
| F9P USB | 1 |
| F9P UART | 1 |
| CAN | 1 |
| Interface d'antenne Type | 1(mmcx) |
| Température de fonctionnement | |
| Tension d'alimentation | 4.5~6v |
| Température de fonctionnement | -20~85℃ |
| Taille | 56x33x16.5mm |
| Poids | 39g |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “C-RTK2 PPK/RTK High-precise Positioning Module for Mapping”
Vous devez être connecté pour publier un avis.
Produits similaires


Accessoires pour drones
Skyrc D100 V2 Charger Twin-Channel AC/DC LiPo 1-6s For LiPo/ LiFe/ LiIon App Control
€139.00



Contrôleur de vol, GPS et RTK
VPS-381 PPK Récepteur GNSS aéroporté Levés aériens et cartographie RTK PPK 2en1
€2,780.00






Accessoires pour drones
T-motor AT7224 40CC VTOL Fixed Wing Aircraft Long Shaft Brushless Motor
€229.99




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Avis
Il n’y a pas encore d’avis.