









Stabilizing the Mini Z10TIRM is a highly optimized 3-axis camera gimbal with pinpoint-precise motor rotation with a control accuracy of ±0.01° powered by a dedicated processor. Mini Z10TIRM uses a unique mechanically limited design and concealed wires to ensure more stable data transmission and greater durability. Vibration is eliminated using four damping balls and a lightweight damping board, creating seamlessly smooth video. 360°rotation remains possible through gimbal rotation. Stable, smooth footage image can be captured even when flying at high speed flight.

Appareil photo à zoom optique 10x
Powered by 1/3″ CMOS module,the camera has 4.08 Mega valid pixels, supports 10 times optical focus FHD 1080P video. Designed according to the characteristics of aerial photography application. Fast auto-focus, multi functional, small size, and support TCP and TTL serial control.

IR+EO Dual Sensors Object Tracking
Build-in normalization, cross-correlation and tracking algorithm, combining with object missing recapture algorithm, achieve stable track of the target. Support custom characters of user OSD, adaptive gate, cross cursor, trace information display. The tracking speed is up to 48pixel/frame, object size range is from 32*32 pixel to 128*128 pixel, with the minimal signal-to-noise ratio (SNR) 4db, the mean square root values of pulse noise in the object position < 0.5 pixel, which greatly improve the accuracy and tracking effect.

Résolution de la localisation GPS
L'algorithme avancé de calcul de localisation est utilisé pour calculer la distance de l'objet dans un rayon de 1500 mètres, analyser avec précision la longitude et la latitude de l'objet et les afficher à l'écran. Il joue un rôle auxiliaire important dans l'application de la loi par les forces armées et la police.

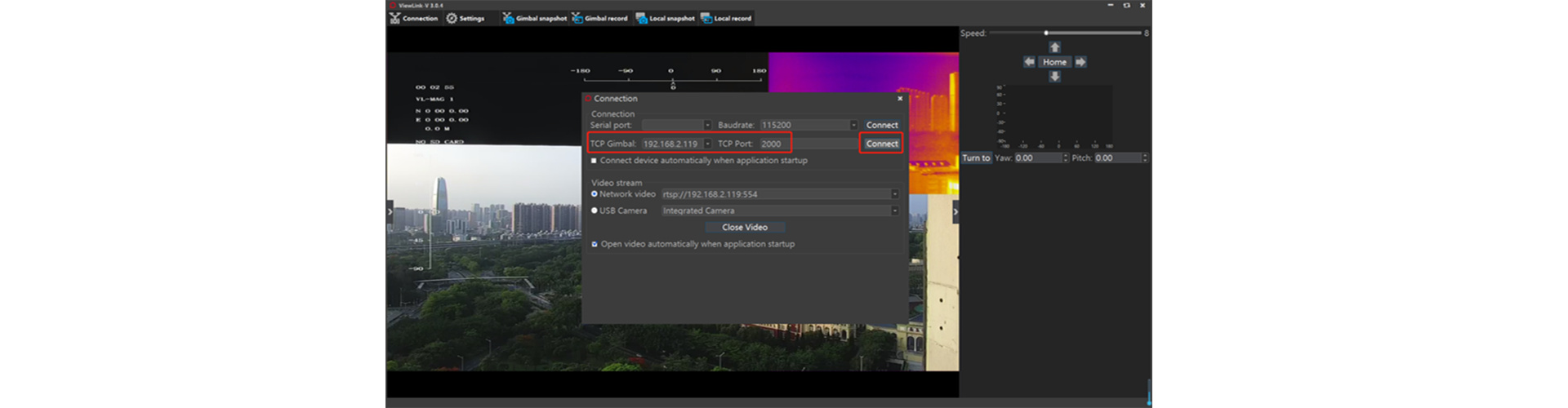
Output Methods and Control
Mini Z10TIRM supports both Ethernet/IP output. Ethernet output default as 1080P and record is 1080p. It will support 360 degree endless pan. With Viewpro software Viewlink you can fulfill IP output, TTL control. PWM/S.BUS/UDP control is optional, please contact viewpro for special request.
Application
Ils sont principalement utilisés dans les domaines de l'application de la loi, de la lutte contre les incendies, de l'inspection des pylônes électriques et des pipelines, de la recherche et du sauvetage, etc. Un large éventail d'activités de surveillance et de recherche est nécessaire en cas d'urgence pour transférer rapidement la situation, améliorer l'efficacité de la réponse et réduire le nombre de victimes.

| Paramètres du matériel | |
| Tension de fonctionnement | 16V |
| Tension d'entrée | 4S ~ 6S |
| Tension de sortie | 5V (connexion avec PWM) |
| Courant dynamique | 570~2000mA @ 16V |
| Environnement de travail temp. | -20℃ ~ +60℃ |
| Sortie | micro HDMI(1080P 60fps) / IP (RTSP/UDP 720p/1080p 25fps/30fps) / SDI (1080P 30fps) |
| Stockage local | TF card (Up to 512G, class 10, FAT32) |
| Format de stockage des photos | JPG (1920*1080) |
| Format de stockage vidéo | MP4 (1080P 30fps) |
| Lecture de cartes en ligne | Lecture SMB / Lecture HTTP |
| Méthode de contrôle | PWM / TTL / S.BUS/ TCP (IP output version) / UDP(IP output version) |
| Géolocalisation | Prise en charge, affichage de l'heure et des coordonnées GPS dans l'image exif |
| Spécifications du cardan | |
| Gamme mécanique | Pitch/Tilt: -33°~113°, Roll: ±40°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Gamme contrôlable | Pitch/Tilt: -30°~110°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| Angle de vibration | Tangage/roulis : ±0,02°, lacet:±0,02° |
| Une seule touche pour centrer | √ |
| Spécifications de la caméra EO | |
| Capteur d'image | 1/3-type CMOS(Progressive Scan) |
| Qualité de l'image | Full HD 1080 (1920*1080) |
| Pixel effectif | 4.08MP |
| Zoom optique de l'objectif | 10x, F=3.3~33.0mm, F1.8~3.4 |
| Zoom numérique | 16x |
| Distance minimale de l'objet | 10mm(wide end) to 800mm(tele end) |
| Angle de vue horizontal | 58.2°(wide end) ~ 6.9°(tele end) |
| Système de synchronisation | Interne |
| Rapport S/B | plus de 50dB |
| Éclairage minimal | 0.5 lx (1/30s, F1.8, 50%) |
| Gain | Auto / Manual |
| Balance des blancs | ATW1 (Narrow), ATW2 (Wide), One push, manual (B, R),indoor,outdoor |
| Vitesse d'obturation | 1/1s to 1/10,000s |
| Compensation du rétroéclairage | Oui |
| Contrôle de l'ouverture | 16 étapes |
| OSD | Oui |
| IR Thermal imager spec | |
| Longueur de mise au point | 24 mm |
| FOV horizontal | 18.2° |
| FOV vertical | 14.6° |
| Diagonale FOV | 23.2° |
| Distance de détection (homme : 1,8×0,5m) | 1000 mètres |
| Reconnaître la distance (Homme : 1.8×0.5m) | 250 mètres |
| Distance vérifiée (homme : 1,8×0,5m) | 125 mètres |
| Distance de détection (voiture : 4,2×1,8m) | 3067 mètres |
| Reconnaître la distance (voiture : 4,2×1,8m) | 767 mètres |
| Distance vérifiée (voiture : 4,2×1,8m) | 383 mètres |
| Mode de travail | Imageur thermique à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*512 |
| Pas de pixel | 12μm |
| Méthode de mise au point | Lentille primaire athermique |
| Correction de l'émissivité | 0.01~1 |
| NETD | ≤50mK (@25℃) |
| MRTD | ≤650mK (fréquence caractéristique) |
| Amélioration de l'image | Réglage automatique de la luminosité de l'image et du rapport de contraste |
| Palette de couleurs | Blanc, rouge fer, pseudo-couleur |
| Auto Correction non uniforme | Oui (pas d'obturateur) |
| Zoom numérique | 1x ~ 12x |
| Synchronisation de l'heure exacte | Oui |
| Suivi d'objets par les caméras EO / IR | |
| Taux de mise à jour du pixel de déviation | 50Hz |
| Retard de sortie du pixel de déviation | 5ms |
| Contraste minimal de l'objet | 5% |
| SNR | 4 |
| Taille minimale de l'objet | 32*32 pixels |
| Taille maximale de l'objet | 128*128 pixels |
| Vitesse de suivi | ±48 pixels/image |
| Durée de la mémoire des objets | 100 images (4s) |
| Les valeurs moyennes de la racine carrée du bruit de l'impulsion dans la position de l'objet | < 0,5 pixel |
| Télémètre laser IR | |
| Gamme | 5~1800 meters |
| Résolution | 0.5m |
| Courant de travail : | 80mA (max) |
| Faisceau lumineux | Laser à impulsion 905 nm |
| Angle divergent | 3 mrad |
| Fréquence d'impulsion du laser | 1HZ |
| Puissance | < 1 mW (safe for eye) |
| Mode de télémétrie | Impulsion |
| Résolution des problèmes de localisation | Latitude et longitude de la cible |
| Ranefinder | Mesure de la distance de la cible |
| Informations sur l'emballage | |
| N.W. | 692g(Viewport version) |
| Mesure du produit. | 119.4*105.7*168.1mm / 119.4*105.7*173.8mm(Viewport version) |
| Accessoires | 1pc gimbal camera device, screws, copper cylinders, damping balls, damping boards, TTL cable / Hight quality plastic box with foam cushion |
| G.W. | 2264g |
| Mesure de l'emballage. | 300*250*200mm |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “Mini Z10TIRM Dual-sensor Object GPS Coordinate Resolving and LRF Gimbal Camera”
Vous devez être connecté pour publier un avis.
Produits similaires




Cardans et charge utile


Cardans et charge utile




Cardans et charge utile
Q30TM Caméra Gimbal 30x à résolution de coordonnées GPS d'objets et LRF




Cardans et charge utile
VO305 UH Definition 3D Oblique Camera UAV Aerial Mapping and Surveying


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Avis
Il n’y a pas encore d’avis.