










1. Professional 3-axis High-precise FOC Program
Stabilized the Q30TIR lite is a highly optimized 3-axis gimbal payload with pinpoint-precise motor rotation with a control accuracy of ±0.01° powered by a dedicated processor. Rather than rely on electrical slip rings – as is common with many gimbals – the Q30TIR lite uses a unique mechanically limited design and concealed wires to ensure more stable data transmission and greater durability. Vibration is eliminated using four damping balls and a lightweight damping board, creating seamlessly smooth video. 360°rotation remains possible through gimbal rotation. Stable, smooth footage image can be captured even when flying at high speed flight.

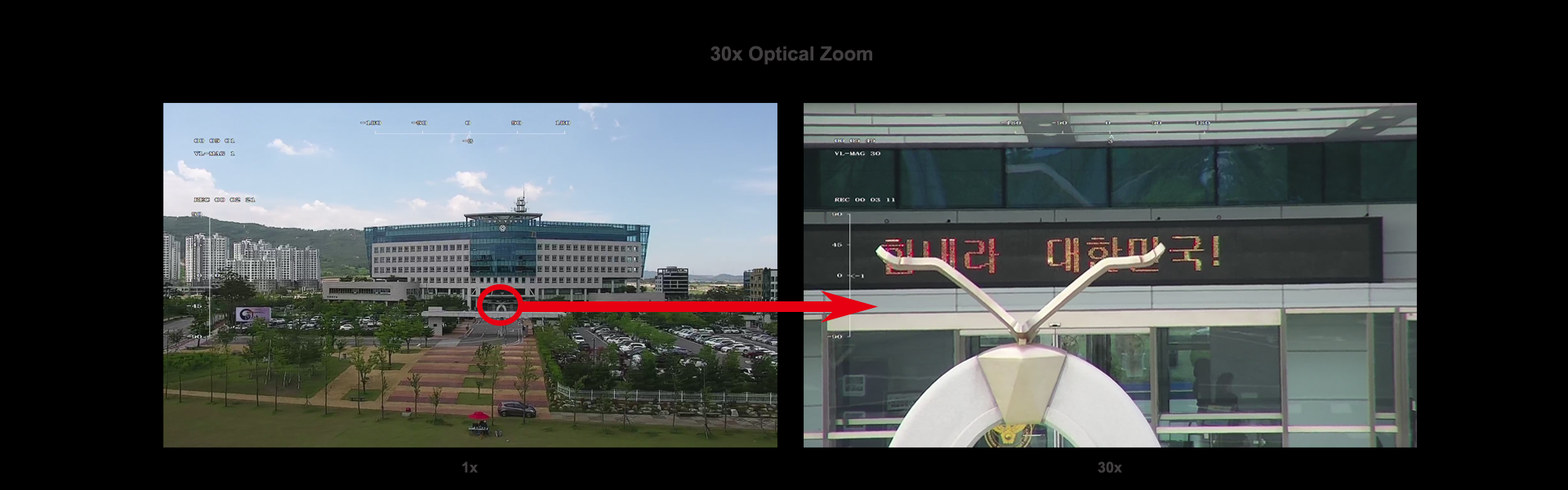
2. Lighter SONY 30x Zoom Starlight Camera
Powered by SONY 1/2.8 Exmor R CMOS module, with [email protected] starlight level min illumination, Q30TIR lite can still clearly display image features in utter poor light environment. 2.13 mega effective pixel and 1080p FHD image quality, combined with 30x advanced optical zoom technology, the observation range is up to 3000 meters, which can meet the application requirements of various domains.
3. Advanced IR Thermal Imager
Integrated French ULIS high-precision uncooled long wave (8μm ~14μm ) thermal image sensor, Q30TIR lite can record and transmit thermal image and visible images at the same time in PIP format.
Optional thermometry version: With temperature measuring sensor, it could accurately attain the temperature of objects and individuals. The thermal sensor allows three points’ temperature ranging between 0℃~120℃ to be measured and displayed on screen. Adjust the different colors applied to the thermal data based on the needs of specific scenarios.
*Temp bar: Indicates gradually variation temperature with corresponding colors.
*Temp measurement: Display average, highest, and lowest temperatures in real time.
*Temp alarm: Don’t miss a thing when object temperatures exceed pre-set alert values.

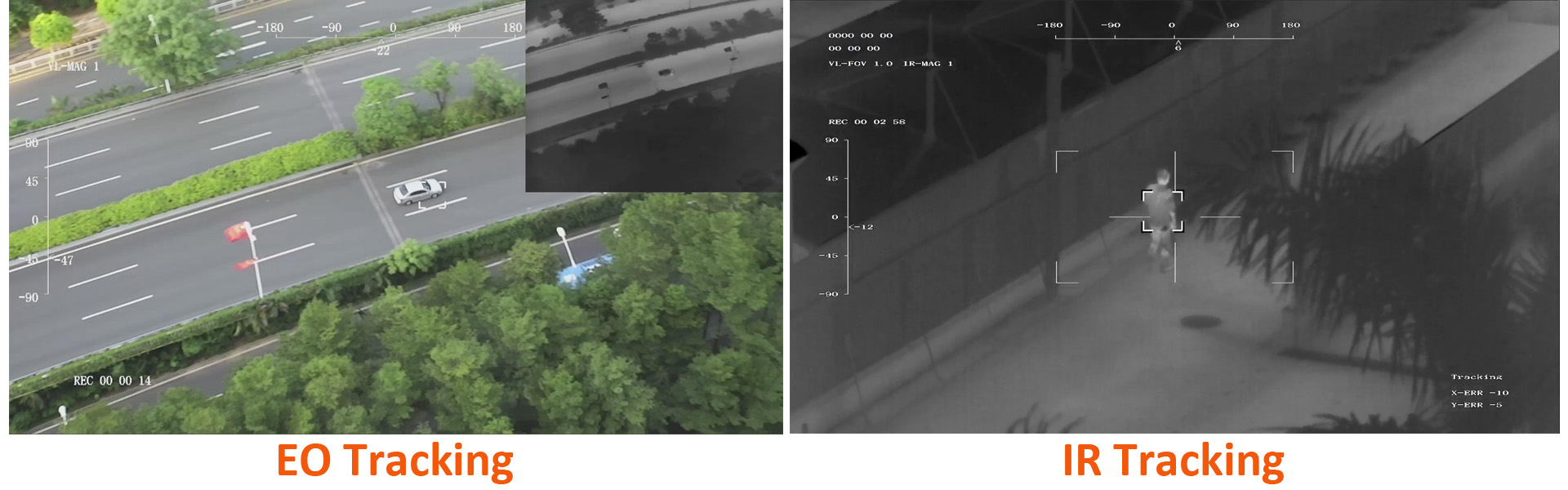
4. Visible Light and Thermal Imager Dual Sensors Object Tracking
Normalisation intégrée, corrélation croisée et algorithme de suivi, combinés à l'algorithme de recapture des objets manquants, pour un suivi stable de la cible. Prise en charge des caractères personnalisés de l'OSD de l'utilisateur, de la porte adaptative, du curseur transversal et de l'affichage des informations sur la trace. La vitesse de suivi peut atteindre 32 pixels par image, la taille de l'objet est comprise entre 16*16 pixels et 160*160 pixels, avec un rapport signal/bruit (SNR) minimal de 4 dB, les valeurs moyennes de la racine carrée du bruit d'impulsion dans la position de l'objet étant inférieures à 0,5 pixel, ce qui améliore considérablement la précision et l'effet de suivi.
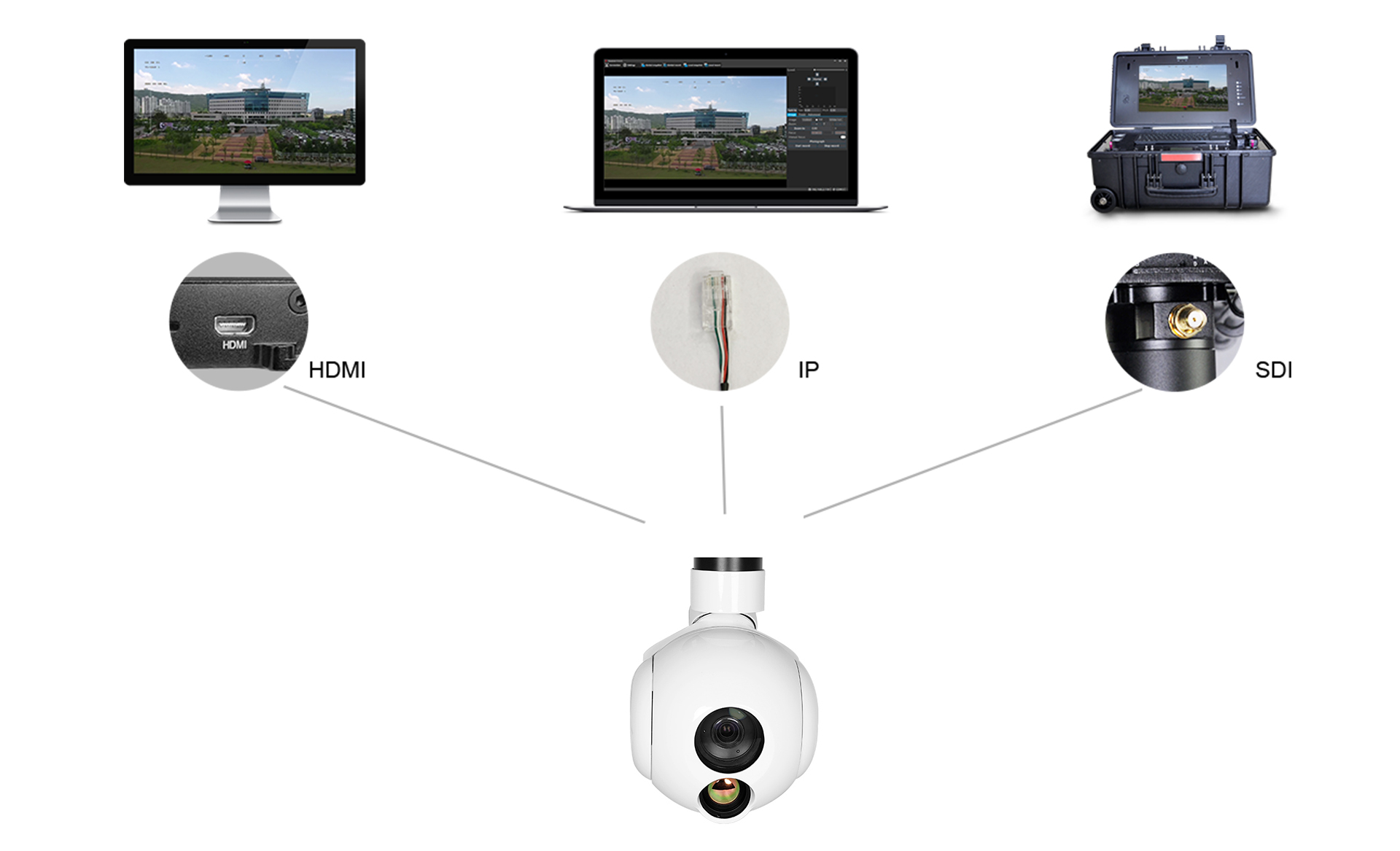
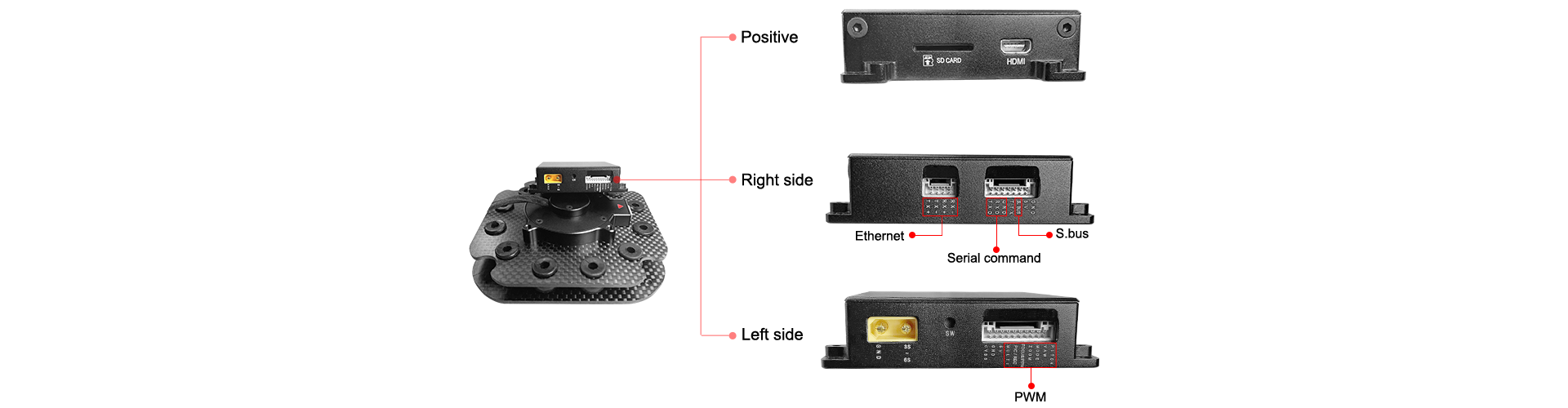
Méthodes de sortie multiples en option
Q30TIR lite supports both HDMI output, Ethernet/IP output and SDI output. HDMI and output are 1080p, Ethernet output defualt as 720p and record is 1080p. IP output and SDI output versions will support 360degree enless pan.
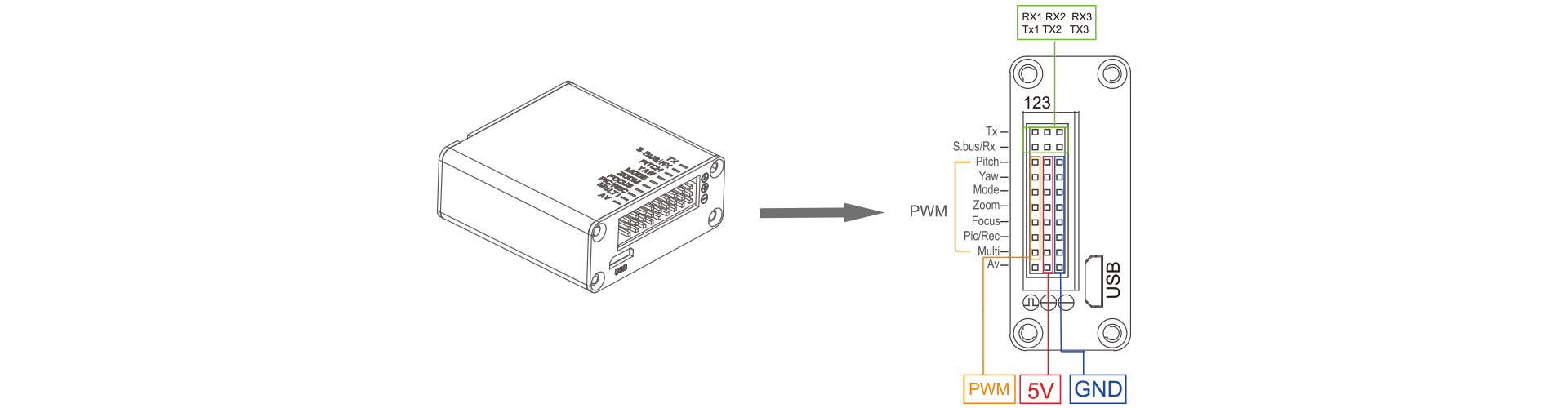
Méthodes de contrôle multiples
Defualt PWM and Serial port TTL control, SBUS is optional, IP output version also support TCP control via ethernet cable. With Viewpro software Viewlink you can fulfill IP output, TTL control and TCP contorl.

Interfaces de signaux du boîtier de commande :
Compatible avec Viewport
Q30TIR lite is compatible with Viewpro quick release connector Viewport. Viewport is an option known as easy assembly, plug and play.
Pour plus d'informations sur Viewport, veuillez consulter les instructions vidéo ci-dessous :
Application
Ils sont principalement utilisés dans les domaines de l'application de la loi, de la lutte contre les incendies, de l'inspection des pylônes électriques et des pipelines, de la recherche et du sauvetage, etc. Un large éventail d'activités de surveillance et de recherche est nécessaire en cas d'urgence pour transférer rapidement la situation, améliorer l'efficacité de la réponse et réduire le nombre de victimes.

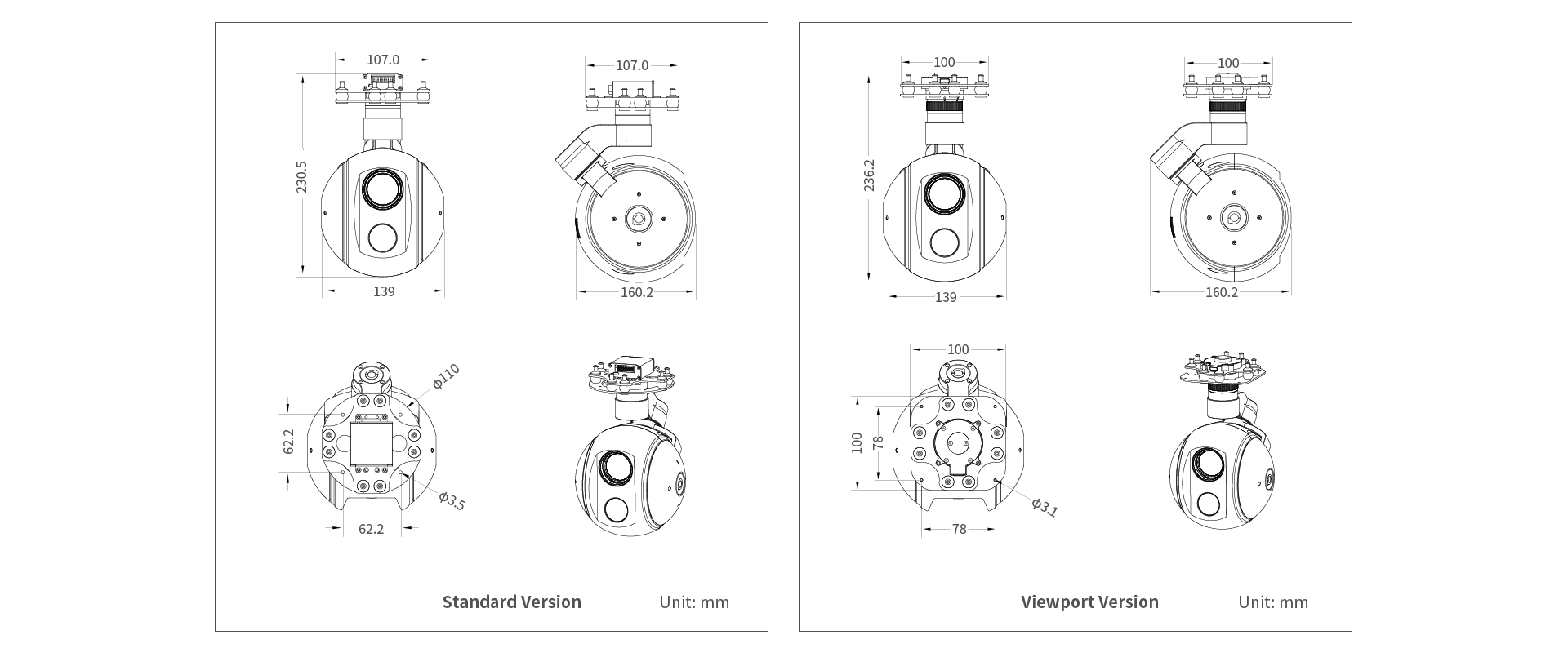
Dimensions
| Paramètres du matériel | |
| Tension de fonctionnement | 16V |
| Tension d'entrée | 4S ~ 6S (14,8V~25,2V) |
| Tension de sortie | 5V (connexion avec PWM) |
| Courant dynamique | 620~1250mA @ 16V |
| Consommation électrique | Average 10W, Max 20W |
| Environnement de travail temp. | -20℃ ~ +50℃ |
| Sortie (en option) |
micro HDMI(1080P 60fps) / IP (RTSP/UDP 720p/1080p 25fps /30fps H264/H265) / SDI (1080P 30fps) |
| Stockage local | TF card (Up to 512G,class 10, FAT32 format) |
| Format de stockage des photos | JPG (1920*1080) |
| Format de stockage vidéo | MP4 (1080P 30fps) |
| Méthode de contrôle | PWM / TTL / S.BUS / TCP / UDP |
| Spécifications du cardan | |
| Angle range of structure design |
Pitch/Tilt:-60°~130°, Roll: ±40°, Yaw/Pan: ±300° / ±360°*N (IP / SDI output version) |
| Angle range of software design |
Pitch/Tilt: -45°~125°, Yaw/Pan: ±290° / ±360°*N (IP / SDI output version) |
| Angle de vibration | Tangage/roulis : ±0,02°, lacet:±0,02° |
| Une seule touche pour centrer | √ |
| Spécifications de la caméra EO | |
| Capteur d'image | Capteur CMOS de type STARVIS2 1/2,8 |
| Qualité de l'image | Full HD 1080 (1920*1080) |
| Pixel effectif | 2.13MP |
| Zoom optique de l'objectif | 30x, F=4,3~129mm |
| Zoom numérique | 12x (360x avec le zoom optique) |
| Distance minimale de l'objet | 10 mm (extrémité large) à 1200 mm (extrémité télé) |
| Angle de vue horizontal | 64,0° (extrémité large) ~ 2,4° (extrémité télé) |
| Système de synchronisation | Interne |
| Rapport S/B | plus de 50dB |
| Éclairage minimal | Couleur 0,009 lux (1/30 sec, 50%, mode haute sensibilité activé) |
| Couleur 0,09 lux (1/30 sec, 50%, mode haute sensibilité désactivé) | |
| Contrôle de l'exposition |
Auto, Manuel, Mode prioritaire (priorité à l'obturateur et priorité à l'iris), EV compensation, Slow AE |
| Gain | Auto/Manuel 0dB à 50,0dB (0 à 28 pas) Limite de gain max. 10,7 dB à 50,0 dB (6 à 28 étapes) |
| Balance des blancs |
Auto, ATW, Intérieur, Extérieur, One Push WB, Manual WB, Outdoor Auto, Lampe à vapeur de sodium (Fix/Auto/Outdoor Auto) |
| Vitesse d'obturation | 1/1s à 1/10 000s, 22 étapes |
| Compensation du rétroéclairage | Oui |
| Désembuage | Oui |
| Spécifications de l'imageur thermique IR | |
| Longueur de mise au point | 24 mm |
| FOV horizontal | 18.2° |
| FOV vertical | 14.6° |
| Diagonale FOV | 23.2° |
| Distance de détection (homme : 1,8×0,5m) | 1000 mètres |
| Reconnaître la distance (Homme : 1.8×0.5m) | 250 mètres |
| Distance vérifiée (homme : 1,8×0,5m) | 125 mètres |
| Distance de détection (voiture : 4,2×1,8m) | 3067 mètres |
| Reconnaître la distance (voiture : 4,2×1,8m) | 767 mètres |
| Distance vérifiée (voiture : 4,2×1,8m) | 383 mètres |
| Mode de travail | Imageur thermique à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*512 |
| Pas de pixel | 12μm |
| Méthode de mise au point | Lentille primaire athermique |
| Correction de l'émissivité | 0.01~1 |
| NETD | ≤50mK (@25℃) |
| MRTD | ≤650mK (fréquence caractéristique) |
| Amélioration de l'image | Réglage automatique de la luminosité de l'image et du rapport de contraste |
| Palette de couleurs | Blanc, rouge fer, pseudo-couleur |
| Auto Correction non uniforme | Oui (pas d'obturateur) |
| Zoom numérique | 1x ~ 4x |
| Type de thermométrie | Pas de soutien |
| Suivi d'objets par la caméra EO/IR | |
| Taux de mise à jour du pixel de déviation | 50Hz |
| Retard de sortie du pixel de déviation | 5ms |
| Contraste minimal de l'objet | 5% |
| SNR | 4 |
| Taille minimale de l'objet | 32*32 pixels |
| Taille maximale de l'objet | 128*128 pixels |
| Vitesse de suivi | ±48 pixels/image |
| Durée de la mémoire des objets | 100 images (4s) |
| Les valeurs moyennes de la racine carrée du bruit de l'impulsion dans la position de l'objet | < 0,5 pixel |
| Caractéristiques | |
| OSD |
Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, date and time |
| Géolocalisation | Affichage de l'heure et des coordonnées GPS dans l'image exif |
| Lecture de cartes en ligne | Lecture d'images ou de vidéos par SMB / Lecture d'images ou de vidéos par HTTP |
| KLV (UDP) | Enregistrement sur carte ou lecture vidéo Viewlink |
| ArduPilot / PX4 | Prise en charge (protocole Mavlink) |
| Assemblage vidéo | EO+IR /IR+EO /EO /IR |
| Sortie double flux vidéo | Non pris en charge (sortie à deux flux EO et IR) |
| Informations sur l'emballage | |
| N.W. | 1039g(Viewport version with Viewport) |
| Mesure du produit. | 129.8*111.6*188.1mm / 129.8*111.6*193.8mm(Viewport version with Viewport) |
| Accessoires |
1pc gimbal camera device, screws, copper cylinders, damping balls, damping boards, 1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| G.W. | 2274g |
| Mesure de l'emballage. | 300*250*200mm |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “Q30TIR lite 30x EO + 25mm IR Dual Sensor 3axis Gimbal Camera for UAV”
Vous devez être connecté pour publier un avis.
Produits similaires


Cardans et charge utile


Cardans et charge utile
Q30TIRM Pro 30x Zoom EO/IR 3KM High-level Laser Rangefinder Object Tracking Camera


Cardans et charge utile
Q20KTIR Caméra 4K Zoom optique continu 20x EO-IR Caméra de poursuite à double capteur Charge utile


Cardans et charge utile
VOM-42 - Caméra de cartographie 42MP pour les levés aériens sur de grandes surfaces


Cardans et charge utile
U30TIR Caméra Gimbal 30x Zoom EO+ IR à double capteur et suivi d'objet sur 2 axes


Cardans et charge utile
VO305 UH Definition 3D Oblique Camera UAV Aerial Mapping and Surveying


Cardans et charge utile
U2 Ultra Léger Micro Prime LensDual EO Sensors FHD 1080P Object Tracking Gimbal Camera


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Avis
Il n’y a pas encore d’avis.