





Professional 3-axis High-precise FOC Program
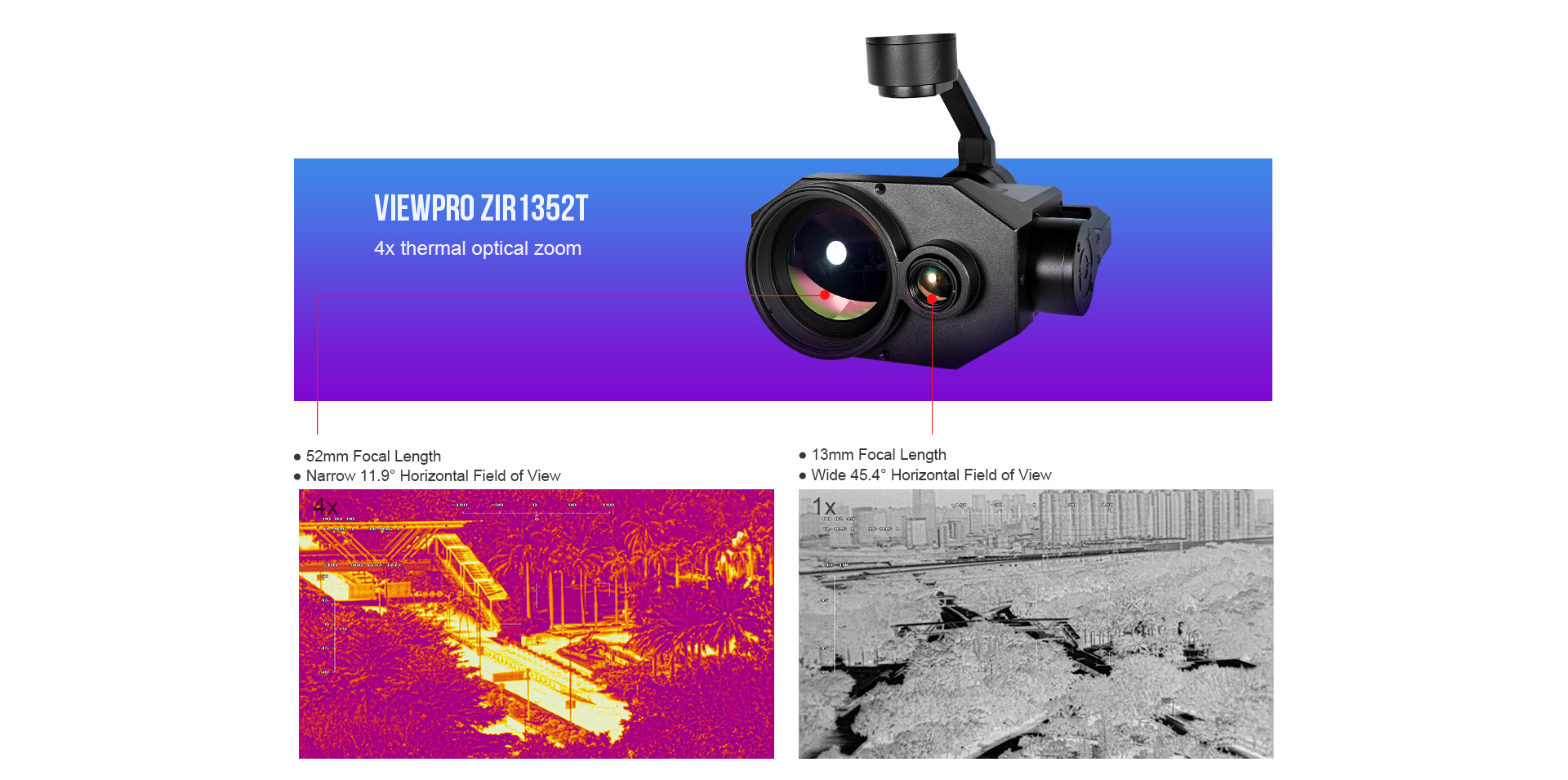
The ZIR1352T features thermal imager with 13mm & 52mm lens, supports 640*480 detector pixels, 4x optical zoom and 1x ~ 4x digital zoom. The gimbal can be controlled in three directions: YAW, ROLL and PITCH , we use FOC solution can greatly compensate the vibration of UAV.
High Resolution Dual Thermal Zooming Camera
Integrated French ULIS high-precision uncooled long wave (8μm ~14μm) thermal image sensor. With 4x optical zoom capabilities that IR sensor sitches from 13mm to 52mm, provides a wide 45.4° field of view for maximum situational awareness and a narrow 11.9° field of view to get the most thermal pixels on your target. The ZIR1352T allows drone pilots from the public safety and indstrial inspection sectors to gain field of FOV flexibility for improved image detailsand magnification to assess situations and and make critical decisions.
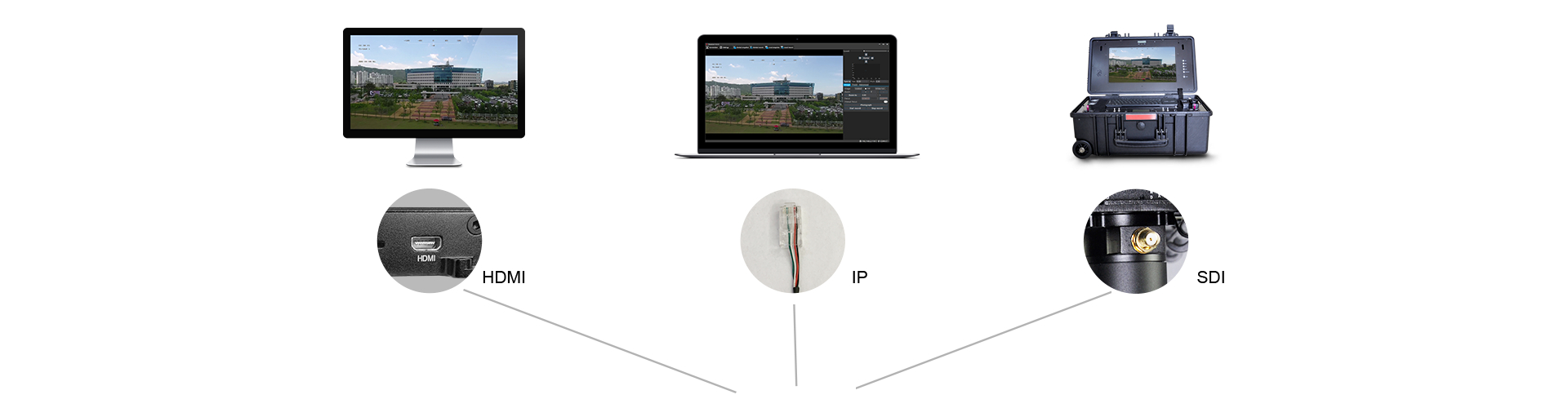
Méthodes de sortie multiples en option
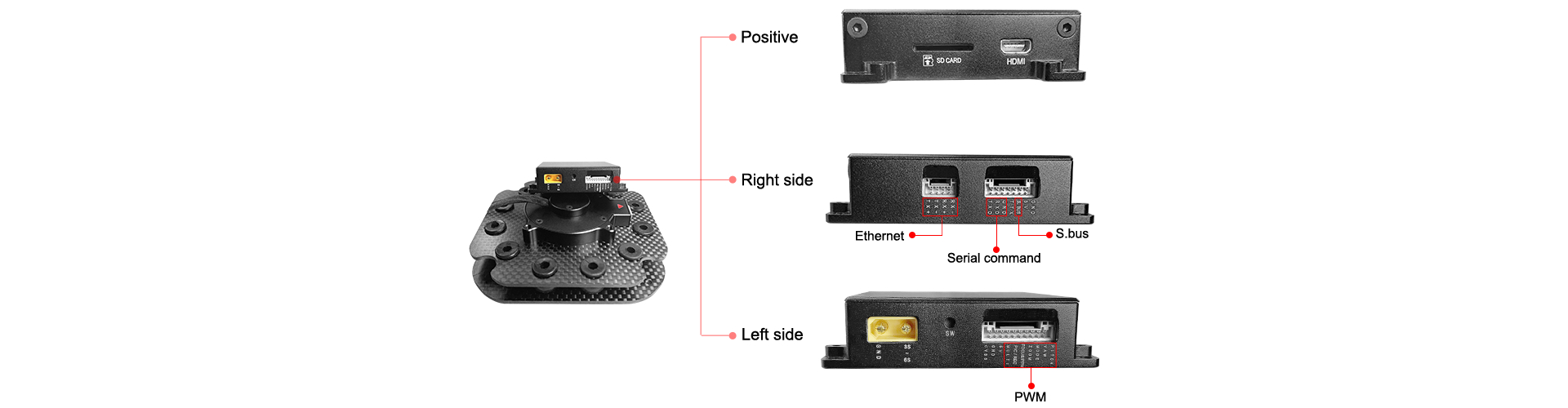
ZIR1352T supports both HDMI output, Ethernet/IP output and SDI output. HDMI and output are 1080p, Ethernet output default as 720p and record is 1080p. IP output and SDI output versions will support 360 degree enless pan.

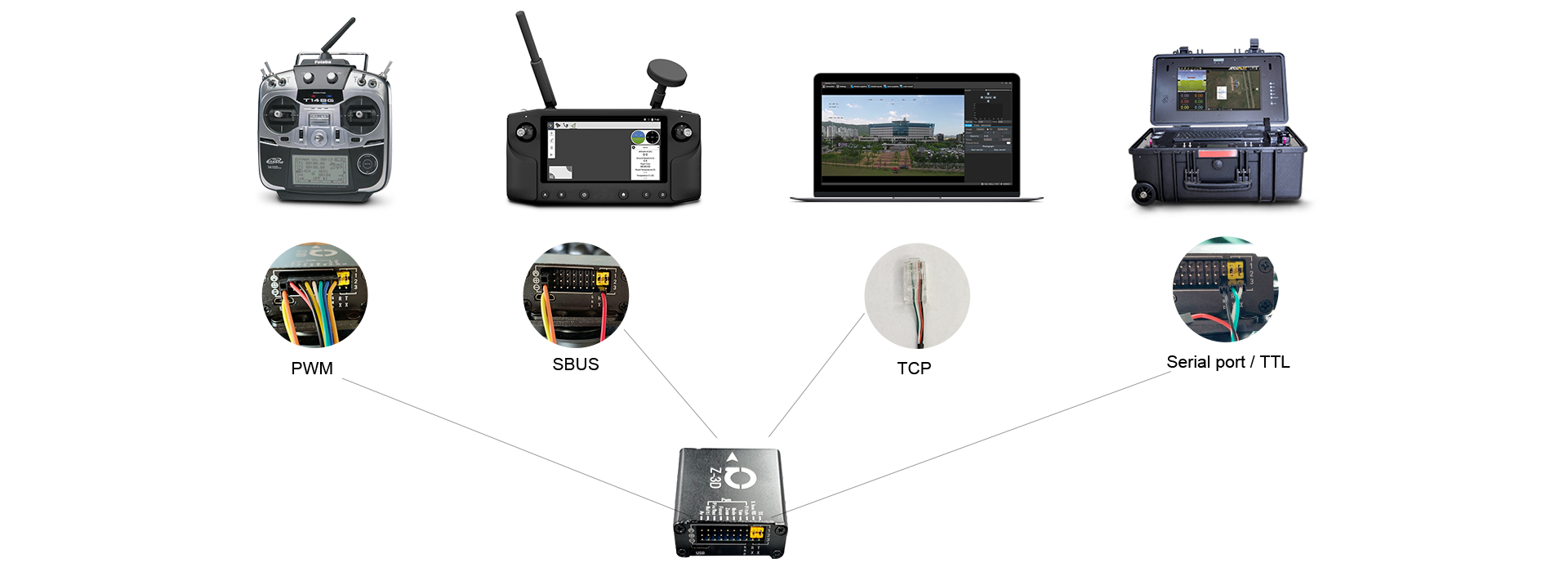
Méthodes de contrôle multiples
Default PWM and Serial port TTL control, SBUS is optional, IP output version also support TCP control via ethernet cable. With Viewpro software Viewlink you can fulfill IP output, TTL control and TCP contorl.
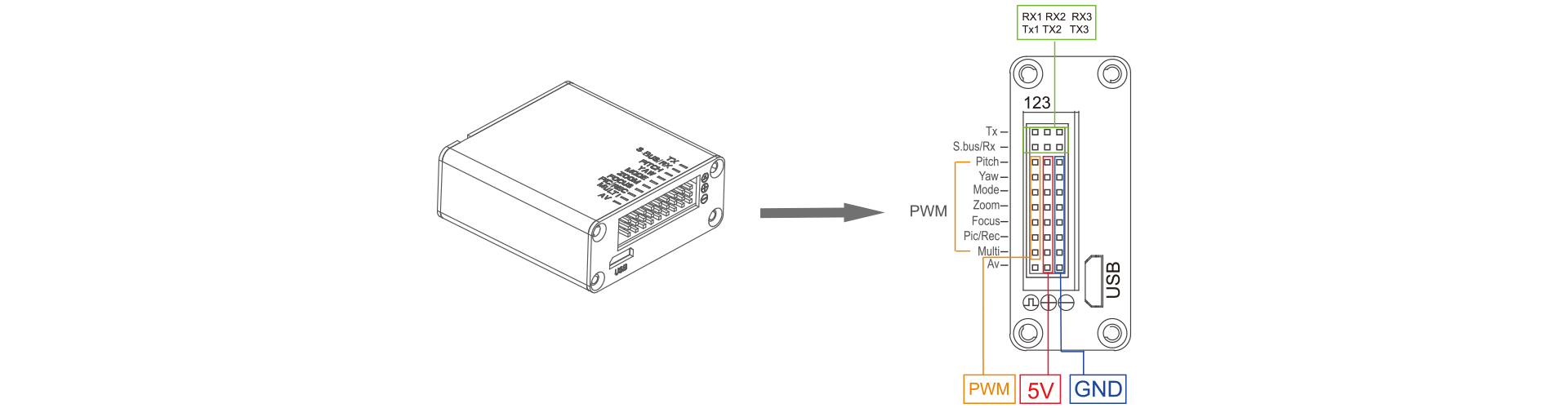
Interfaces de signaux du boîtier de commande :
Compatible avec Viewport
ZIR1352T is compatible with Viewpro quick release connector Viewport. Viewport is an option known as easy assembly, plug and play.
Pour plus d'informations sur Viewport, veuillez consulter les instructions vidéo ci-dessous :
Application
Ils sont principalement utilisés dans les domaines de l'application de la loi, de la lutte contre les incendies, de l'inspection des pylônes électriques et des pipelines, de la recherche et du sauvetage, etc. Un large éventail d'activités de surveillance et de recherche est nécessaire en cas d'urgence pour transférer rapidement la situation, améliorer l'efficacité de la réponse et réduire le nombre de victimes.
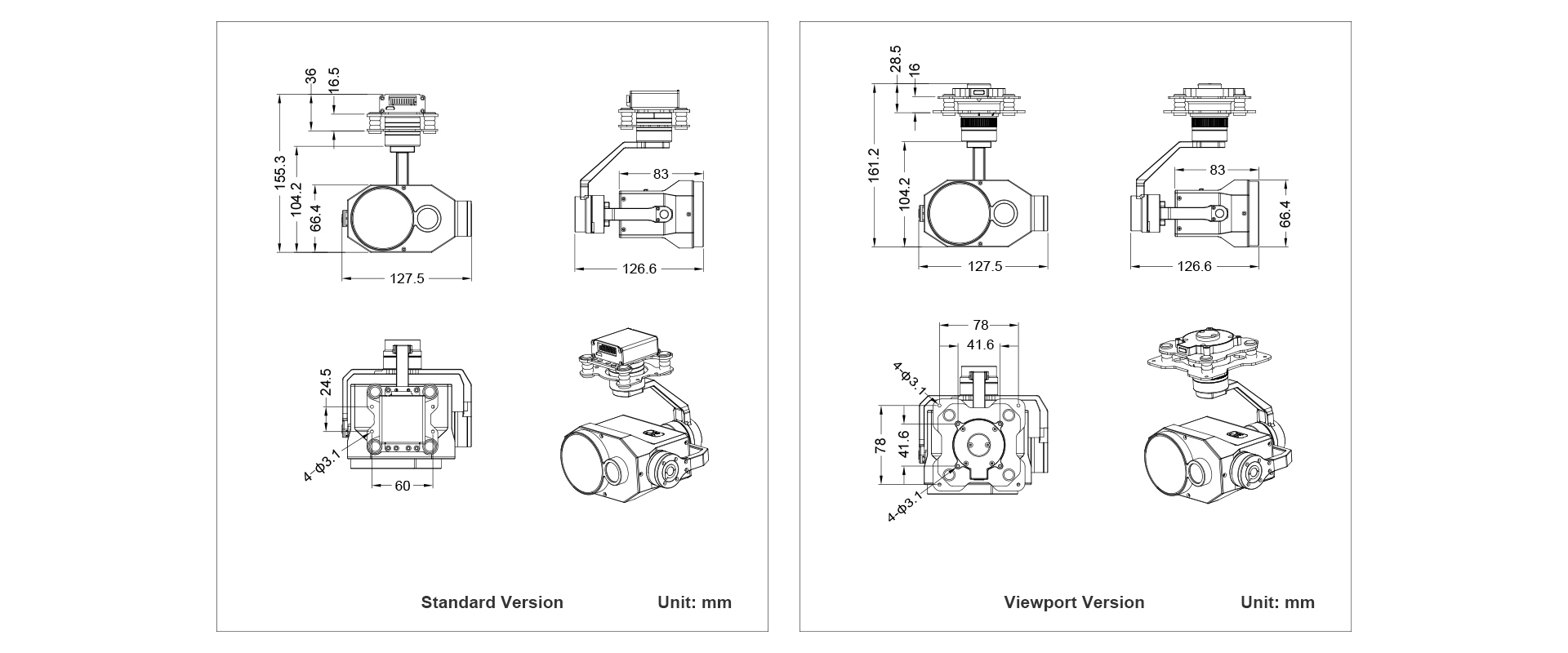
Dimensions
| Paramètres du matériel | |
| Tension de fonctionnement | 12V ~ 16V |
| Tension d'entrée | 3S ~ 4S |
| Courant dynamique | 650mA~850mA @ 12V |
| Courant de repos | 540mA @ 12V |
| Environnement de travail temp. | -20℃ ~ +60℃ |
| Sortie | micro HDMI(HD output 1080P 50fps) / IP (1080P/720P) |
| Stockage local | Carte SD (jusqu'à 128G, classe 10, format FAT32 ou ex FAT) |
| Méthode de contrôle | PWM / TTL / S.BUS / TCP (IP output) |
| Spécifications du cardan | |
| Gamme mécanique | Pitch/Tilt: -70~120°, Roll: ±55°, Lacet/Pan : ±300° / ±360°*N (version sortie IP) |
| Gamme contrôlable | Pitch/Tilt: -45°~90°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| Angle de vibration | Tangage/roulis : ±0,02°, lacet:±0,02° |
| Une seule touche pour centrer | √ |
| Spécifications de l'imageur thermique | |
| Taille de l'objectif | 52mm |
| FOV horizontal | 11.9° |
| FOV vertical | 9° |
| Diagonale FOV | 14.9° |
| Distance de détection (homme : 1,8×0,5m) | 1529 meters |
| Reconnaître la distance (Homme : 1.8×0.5m) | 382 meters |
| Distance vérifiée (homme : 1,8×0,5m) | 191 meters |
| Distance de détection (voiture : 4,2×1,8m) | 4690 meters |
| Reconnaître la distance (voiture : 4,2×1,8m) | 1173 meters |
| Distance vérifiée (voiture : 4,2×1,8m) | 586 meters |
| Mode de travail | Imageur thermique à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*480 |
| Taille du pixel | 17μm |
| Méthode de mise au point | Lentille primaire athermique |
| Correction de l'émissivité | 0.01~1 |
| NETD | ≤50mK (@25℃) |
| MRTD | ≤650mK (fréquence caractéristique) |
| Amélioration de l'image | Réglage automatique de la luminosité de l'image et du rapport de contraste |
| Palette de couleurs | Blanc, rouge fer, pseudo-couleur |
| Auto Correction non uniforme | Oui (pas d'obturateur) |
| Zoom numérique | 1x ~ 4x |
| Synchronisation de l'heure exacte | Oui |
| Type de thermométrie | Temperature bar (psudo color display) max temp, min temp, FOV center temp (Optional) |
| Avertissement de température | 0℃~120℃ (for thermometry verson only) |
| Spécifications de l'imageur thermique | |
| Taille de l'objectif | 13mm |
| FOV horizontal | 45.4° |
| FOV vertical | 34.8° |
| Diagonale FOV | 55.2° |
| Distance de détection (homme : 1,8×0,5m) | 382 meters |
| Reconnaître la distance (Homme : 1.8×0.5m) | 96 meters |
| Distance vérifiée (homme : 1,8×0,5m) | 48 meters |
| Distance de détection (voiture : 4,2×1,8m) | 1173 meters |
| Reconnaître la distance (voiture : 4,2×1,8m) | 293 meters |
| Distance vérifiée (voiture : 4,2×1,8m) | 147 meters |
| Mode de travail | Imageur thermique à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*480 |
| Taille du pixel | 17μm |
| Méthode de mise au point | Lentille primaire athermique |
| Correction de l'émissivité | 0.01~1 |
| NETD | ≤50mK (@25℃) |
| MRTD | ≤650mK (fréquence caractéristique) |
| Amélioration de l'image | Réglage automatique de la luminosité de l'image et du rapport de contraste |
| Palette de couleurs | Blanc, rouge fer, pseudo-couleur |
| Auto Correction non uniforme | Oui (pas d'obturateur) |
| Zoom numérique | 1x ~ 4x |
| Synchronisation de l'heure exacte | Oui |
| Thermal Imager Object Tracking | |
| Taux de mise à jour du pixel de déviation | 50Hz |
| Retard de sortie du pixel de déviation | 5ms |
| Taille minimale de l'objet | 32*32 pixels |
| Taille maximale de l'objet | 128*128 pixels |
| Vitesse de suivi | 32 pixels/trame |
| Durée de la mémoire des objets | 100 images (4s) |
| Les valeurs moyennes de la racine carrée du bruit de l'impulsion dans la position de l'objet | < 0,5 pixel |
| Informations sur l'emballage | |
| N.W. | 687g |
| Mesure du produit. | 127.5*127.4*156.5mm |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “ZIR1352T Professional 3-axis High-precise FOC Program with High Resolution Dual Thermal Zooming Camera”
Vous devez être connecté pour publier un avis.
Produits similaires


Cardans et charge utile
VOM-42 - Caméra de cartographie 42MP pour les levés aériens sur de grandes surfaces






Cardans et charge utile
Q20KTIR Caméra 4K Zoom optique continu 20x EO-IR Caméra de poursuite à double capteur Charge utile


Cardans et charge utile


Cardans et charge utile


Cardans et charge utile


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Avis
Il n’y a pas encore d’avis.