

























| פרמטר חומרה | |
| מתח עבודה | 16V |
| מתח כניסה | 4S ~ 6S (14.8V~25.2V) |
| מתח יציאה | 5V (חיבור עם PWM) |
| זרם דינמי | 1200~1700mA @ 16V |
| צריכת חשמל | Average 19.2W, Max 27.2W |
| טמפרטורת סביבת העבודה. | -20℃ ~ +50℃ |
| פלט | Micro HDMI(1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264) |
| אחסון מקומי | TF card (Up to 256G,class 10, FAT32) |
| פורמט אחסון תמונות בכרטיס TF | JPG (1920*1080) |
| פורמט אחסון וידאו בכרטיס TF | MP4 (1080P 30fps) |
| שיטת בקרה | PWM / TTL / S.BUS / TCP / UDP |
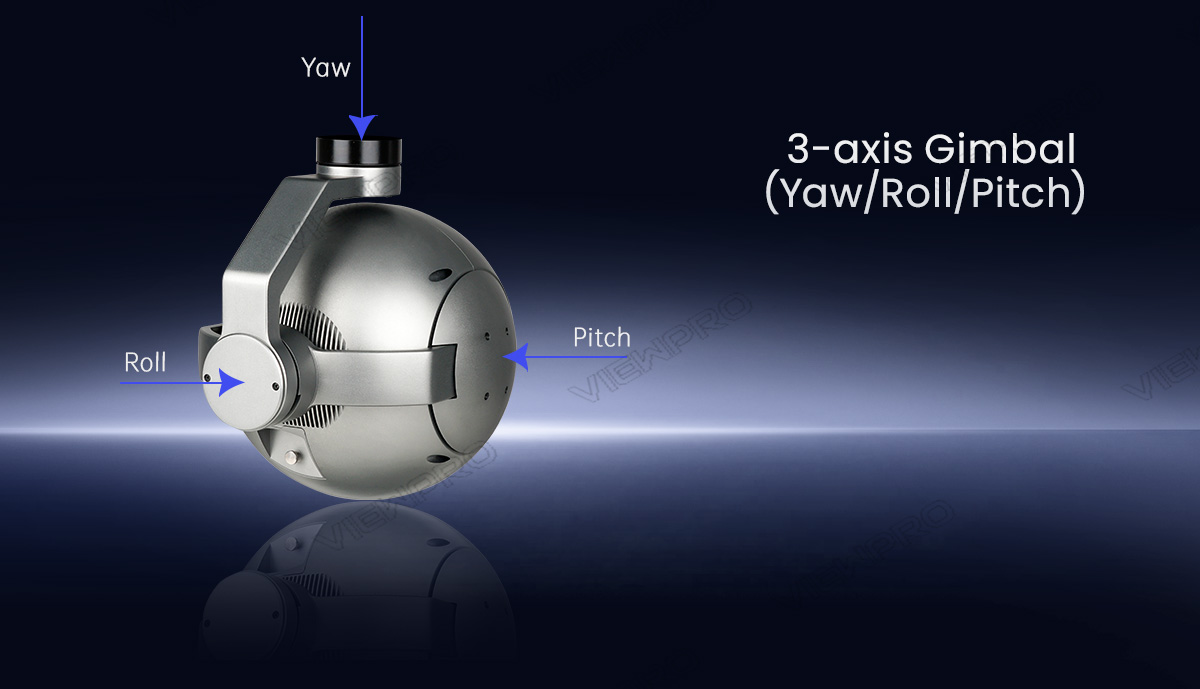
| מפרט גימבל | |
| טווח מכני | Pitch/Tilt: -60°(Up)~105°(Down), Roll: ±60°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| טווח שליטה | Pitch/Tilt: -45°~100°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| זווית הרטט | שיפוע/גלגול/סטייה: ±0.02° |
| מקש אחד למרכז | √ |
| מפרט מצלמת EO | |
| חיישן הדמיה | חיישן CMOS מסוג STARVIS 1/1.8 |
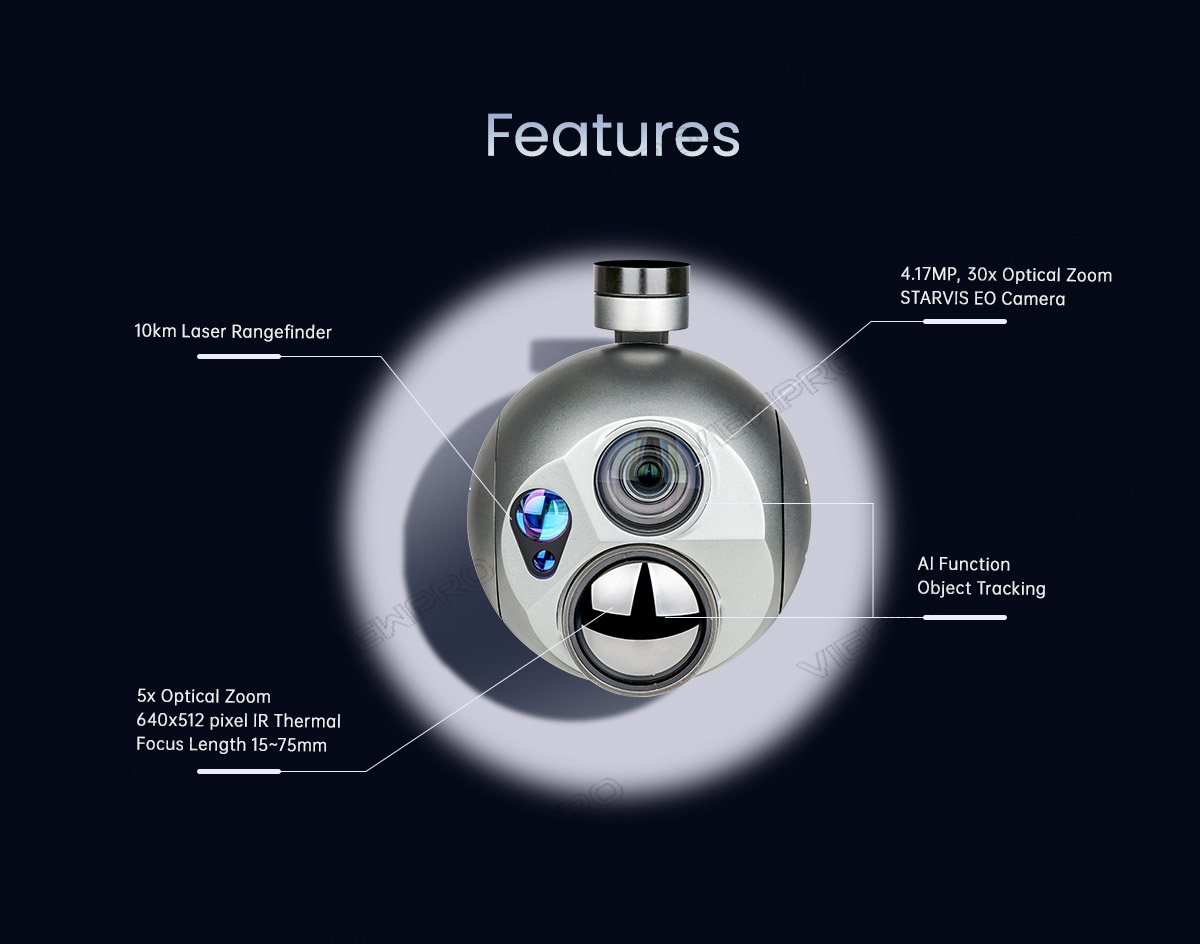
| איכות תמונה | 4.17 מגה-פיקסל |
| זום אופטי של העדשה | 30x, f=6.5~162.5 מ"מ, F1.6 עד F4.8 |
| זום דיגיטלי | 12x (מקסימום 432x עם StableZoom) |
| מרחק מינימלי מהאובייקט | 100 מ"מ (קצה רחב), 1200 מ"מ (קצה טלסקופי) |
| זווית צפייה אופקית | 58.1° (קצה רחב) ~ 2.3° (קצה טלסקופי) |
| תמונה S/N | 50 dB (משקל מופעל) |
| מינימום תאורה | במקרה של ICR-Off (ערך טיפוסי) 0.009 lx (1/30 שניות, 50%, מצב רגישות גבוהה מופעל) 0.09 lx (1/30 שניות, 50%, מצב רגישות גבוהה כבוי) 0.0012 lx (1/4 שניות, 1/3 שניות, 50%, מצב רגישות גבוהה מופעל) 0.012 lx (1/4 שניות, 1/3 שניות, 50%, מצב רגישות גבוהה כבוי) במקרה של ICR-On 0.00008 lx (1/30 שניות, 50%, מצב רגישות גבוהה מופעל) 0.00063 lx (1/30 שניות, 50%, מצב רגישות גבוהה כבוי) 0.000005 lx (1/4 שניות, 1/3 שניות, 30%, מצב רגישות גבוהה מופעל) |
| מצב רגישות גבוהה מופעל/כבוי | כבוי |
| תאורה מומלצת | 100 לוקס עד 100,000 לוקס |
| רווח | אוטומטי/ידני (0 עד 50.0 dB (0 עד 28 שלבים)) מגבלת רווח מקסימלית (10.7 עד 50.0 dB (6 עד 28 שלבים)) |
| איזון לבן | אוטומטי, ATW, פנים, חוץ, WB בלחיצה אחת, WB ידני, אוטומטי חוץ, מנורת אדי נתרן (קבוע/אוטומטי/אוטומטי חוץ) |
| מצב טווח דינמי רחב | הפעלה/כיבוי |
| מהירות תריס | 1/1 שניות עד 1/10000 שניות (22 שלבים) |
| פיצוי תאורה אחורית מופעל/כבוי | כבוי |
| מייצב תמונה מופעל/כבוי/השהיה | כבוי |
| ICR מופעל/כבוי | כבוי |
| הפחתת רעש | הפעלה/כיבוי |
| Defog | הפעלה/כיבוי (נמוך, בינוני, גבוה) |
| מפרט מצלמת תרמית IR | |
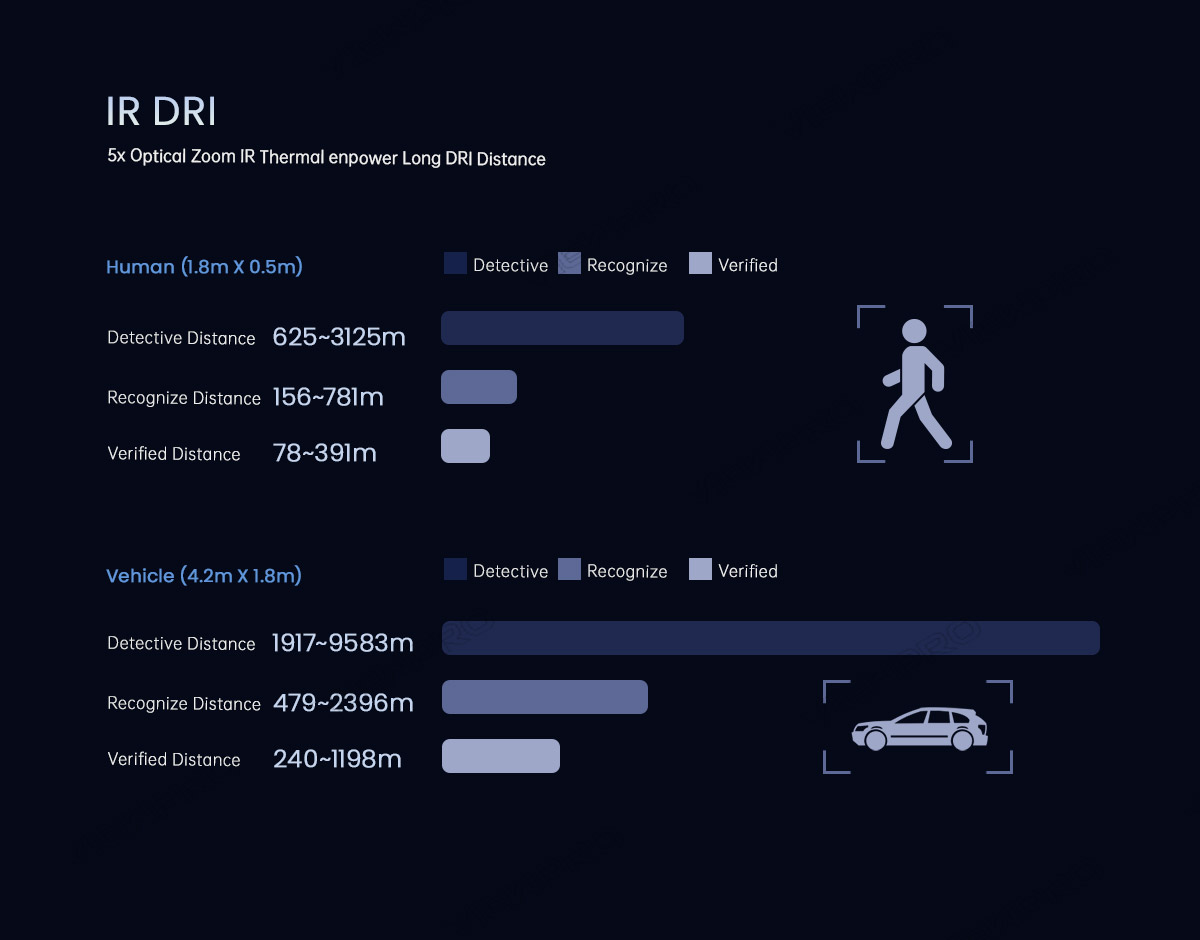
| אורך מוקד | 15~75mm |
| optical zoom | 1x ~ 5x |
| שדה ראייה אופקי | 28.7°~5.86° |
| שדה ראייה אנכי | 23.1°~4.69° |
| 15~75mm Detective Distance (Man: 1.8×0.5m) | 625~3125 meters |
| 15~75mm Recognize Distance (Man: 1.8×0.5m) | 156~781 meters |
| 15~75mm Verified Distance (Man: 1.8×0.5m) | 78~391 meters |
| 15~75mm Detective Distance (Car: 4.2×1.8m) | 1917~9583 meters |
| 15~75mm Recognize Distance (Car: 4.2×1.8m) | 479~2396 meters |
| 15~75mm Verified Distance (Car: 4.2×1.8m) | 240~1198 meters |
| מצב עבודה | מצלמה תרמית VOx ארוכת גל (8μm~14μm) ללא קירור |
| פיקסל גלאי | 640*512 |
| מרווח פיקסלים | 12 מיקרומטר |
| שיטת מיקוד | עדשה ראשית אטמית |
| NETD | ≤40mK@25℃, F #1.0 |
| פלטת צבעים | white hot, black hot, Iron Red |
| מעקב אחר אובייקטים באמצעות מצלמת EO/IR | |
| קצב עדכון של סטיית פיקסל | 30 הרץ |
| עיכוב פלט של פיקסל סטייה | <30 מילי-שניות |
| ניגודיות מינימלית של אובייקטים | 5% |
| SNR | 4 |
| גודל מינימלי של אובייקט | 16*16 פיקסלים |
| גודל אובייקט מרבי | 256*256 פיקסלים |
| מהירות מעקב | ±48 פיקסל/פריים |
| זמן זיכרון אובייקט | 100 פריימים |
| ביצועי AI של מצלמת EO | |
| סוג היעדים | מכונית ואדם |
| כמות זיהוי סימולטני | ≥ 10 יעדים |
| יחס ניגודיות מינימלי | 5% |
| גודל מינימלי | 5×5 פיקסלים |
| שיעור זיהוי מכוניות | ≥85% |
| שיעור אזעקות שווא | ≤10% |
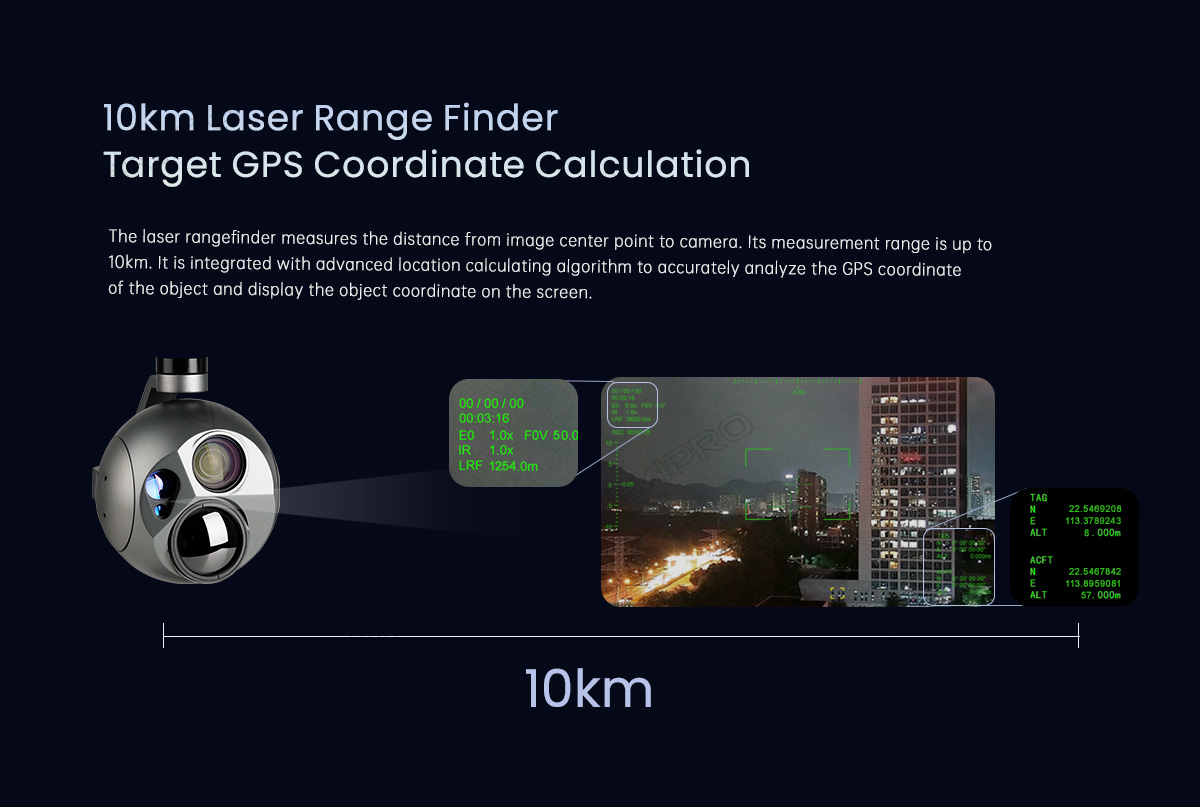
| מד טווח לייזר IR | |
| טווח | 10km for big target (eg. building) ≥6km for car (2.3m×2.3m) ≥2.5km for people (1.75m×0.75m) (בהתבסס על ערך טיפוסי: |
| דיוק | ≤2m (RMS) |
| קרן אור | 1535±5nm pulse laser |
| זווית סוטה | ≤0.5mrad |
| תדירות פולסי הלייזר | 1~10Hz |
| טווח מדידה מינימלי | ≤30m |
| פתרון מיקום | קו רוחב וקו אורך של היעד |
| Rangefinder | מדוד את המרחק בין האובייקט במרכז המסך לבין מד הטווח הלייזר. |
| תכונות | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, ranging value, card recording duration, aircraft GPS and altitude, target ranging point GPS and altitude, date and time |
| תיוג גיאוגרפי | הצגת זמן ונקודת ציון GPS בתמונה exif |
| קריאת קלפים באינטרנט | HTTP קורא תמונות או קטעי וידאו |
| KLV (UDP) | הקלטה בכרטיס או השמעת וידאו ב-Viewlink |
| ArduPilot / PX4 | תמיכה (פרוטוקול Mavlink) Optional: Support Ardupilot Follow me feature |
| Video switching | EO+IR /IR+EO /EO /IR |
| Dual video stream output (optional) | Support(EO and IR two stream output, notes: unable to record once the dulal video stream output activated) |
| מידע על אריזה | |
| N.W. | 2582±50g(Viewport version with Viewport) |
| מידות המוצר. | 200*175*258mm(Viewport version with Viewport) |
| אביזרים | 1pc gimbal camera device, screws, aluminum cylinders, damping balls, damping boards, 1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| משקל | 1 ק"ג |
|---|
היה הראשון לכתוב סקירה “A30TR-1575 5x Optical zoom IR Thermal 30x Optical zoom Starlight EO camera Triple Sensors Al Object Tracking and 10KM LRF Gimbal Camera”
עליך להתחבר כדי לפרסם ביקורת.
מוצרים קשורים


גימבלים ומטען
VO305 UH הגדרה מצלמה אלכסונית תלת-ממדית מיפוי אווירי וסקרים באמצעות כלי טיס בלתי מאוישים
€44,599.99


€4,499.00










גימבלים ומטען
ZIR1352T תוכנת FOC מקצועית בעלת 3 צירים ודיוק גבוה עם מצלמת זום תרמית כפולה ברזולוציה גבוהה
€12,799.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
חוות דעת
אין עדיין חוות דעת.