


















.jpeg)

| פרמטר חומרה | |
| מתח עבודה | 16V |
| מתח כניסה | 4S ~ 6S |
| מתח יציאה | 5V (חיבור עם PWM) |
| זרם דינמי | 800~2200mA @ 16V |
| טמפרטורת סביבת העבודה. | -20℃ ~ +60℃ |
| פלט | מיקרו HDMI (1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps) |
| אחסון מקומי | כרטיס TF (עד 128G, סוג 10, פורמט FAT32 או ex FAT) |
| פורמט אחסון תמונות | JPG (1920*1080) |
| פורמט אחסון וידאו | MP4 (1080P 30fps) |
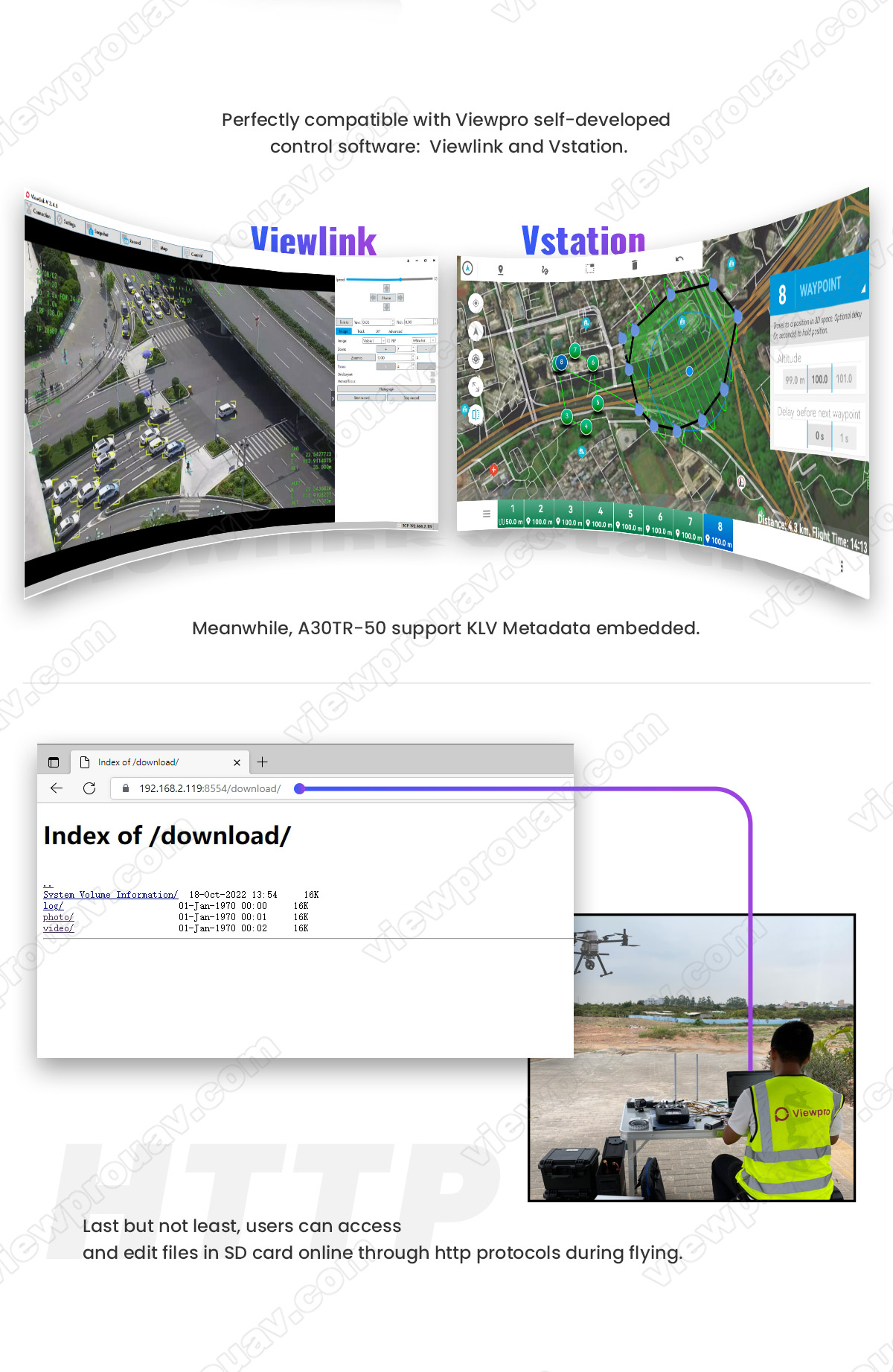
| קריאת קלפים באינטרנט | HTTP read picrutes |
| שיטת בקרה | PWM / TTL / S.BUS / TCP (פלט IP) / UDP (גרסת פלט IP) |
| תיוג גיאוגרפי | תמיכה, זמן תצוגה וקוורדינטות GPS בתמונה exif |
| מפרט גימבל | |
| טווח מכני | Pitch/Tilt: -55°~125°, Roll: ±45°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| טווח שליטה | שיפוע/הטיה: -45°~120°, סיבוב/פנורמה: ±290° / ±360°*N (גרסת פלט IP) |
| זווית הרטט | שיפוע/גלגול: ±0.02°, סטייה: ±0.02° |
| מקש אחד למרכז | √ |
| מפרט המצלמה | |
| חיישן הדמיה | SONY 1/2.8″ "Exmor R" CMOS |
| איכות תמונה | Full HD 1080 (1920*1080) |
| פיקסל אפקטיבי | 2.13 מגה-פיקסל |
| זום אופטי של העדשה | 30x, F=4.3~129 מ"מ |
| זום דיגיטלי | 12x (360x עם זום אופטי) |
| מרחק מינימלי מהאובייקט | 10 מ"מ (קצה רחב) עד 1200 מ"מ (קצה טלסקופי). ברירת מחדל 300 מ"מ |
| זווית צפייה אופקית | מצב 1080p: 63.7° (קצה רחב) ~ 2.3° (קצה טלפוטו) |
| מערכת סנכרון | פנימי |
| יחס אות לרעש | יותר מ-50dB |
| מינימום תאורה | צבע[email protected] |
| בקרת חשיפה | אוטומטי, ידני, מצב עדיפות (עדיפות תריס ועדיפות צמצם), בהיר, פיצוי EV, AE איטי |
| רווח | אוטומטי/ידני 0dB עד 50.0dB (0 עד 28 שלבים + 2 שלבים/ סך הכל 15 שלבים) מגבלת רווח מקסימלי 10.7 dB עד 50.0dB (6 עד 28 שלבים + 2 שלבים/ סך הכל 12 שלבים) |
| איזון לבן | אוטומטי, ATW, פנים, חוץ, WB בלחיצה אחת, WB ידני, אוטומטי חוץ, מנורת אדי נתרן (קבוע/אוטומטי/אוטומטי חוץ) |
| מהירות תריס | 1/1 עד 1/10,000, 22 שלבים |
| פיצוי תאורה אחורית | כן |
| בקרת צמצם | 16 שלבים |
| Defog | כן |
| OSD | כן |
| מפרט מצלמת תרמית IR | |
| אורך מוקד | 50 מ"מ |
| סרט ציפוי | DLC |
| שדה ראייה אופקי | 8.8° |
| שדה ראייה אנכי | 7.0° |
| שדה ראייה אלכסוני | 11.2° |
| מרחק זיהוי (גבר: 1.8×0.5 מטר) | 2083 מטרים |
| זיהוי מרחק (גבר: 1.8×0.5 מטר) | 521 מטרים |
| מרחק מאומת (גבר: 1.8×0.5 מטר) | 260 מטרים |
| מרחק בלשי (מכונית: 4.2×1.8 מ') | 6389 מטרים |
| זיהוי מרחק (מכונית: 4.2×1.8 מטר) | 1597 מטרים |
| מרחק מאומת (מכונית: 4.2×1.8 מטר) | 799 מטרים |
| מצב עבודה | מצלמה תרמית VOx ארוכת גל (8μm~14μm) ללא קירור |
| פיקסל גלאי | 640*512 |
| מרווח פיקסלים | 12 מיקרומטר |
| שיטת מיקוד | עדשה ראשית אטמית |
| NETD | ≤[email protected] @25℃ |
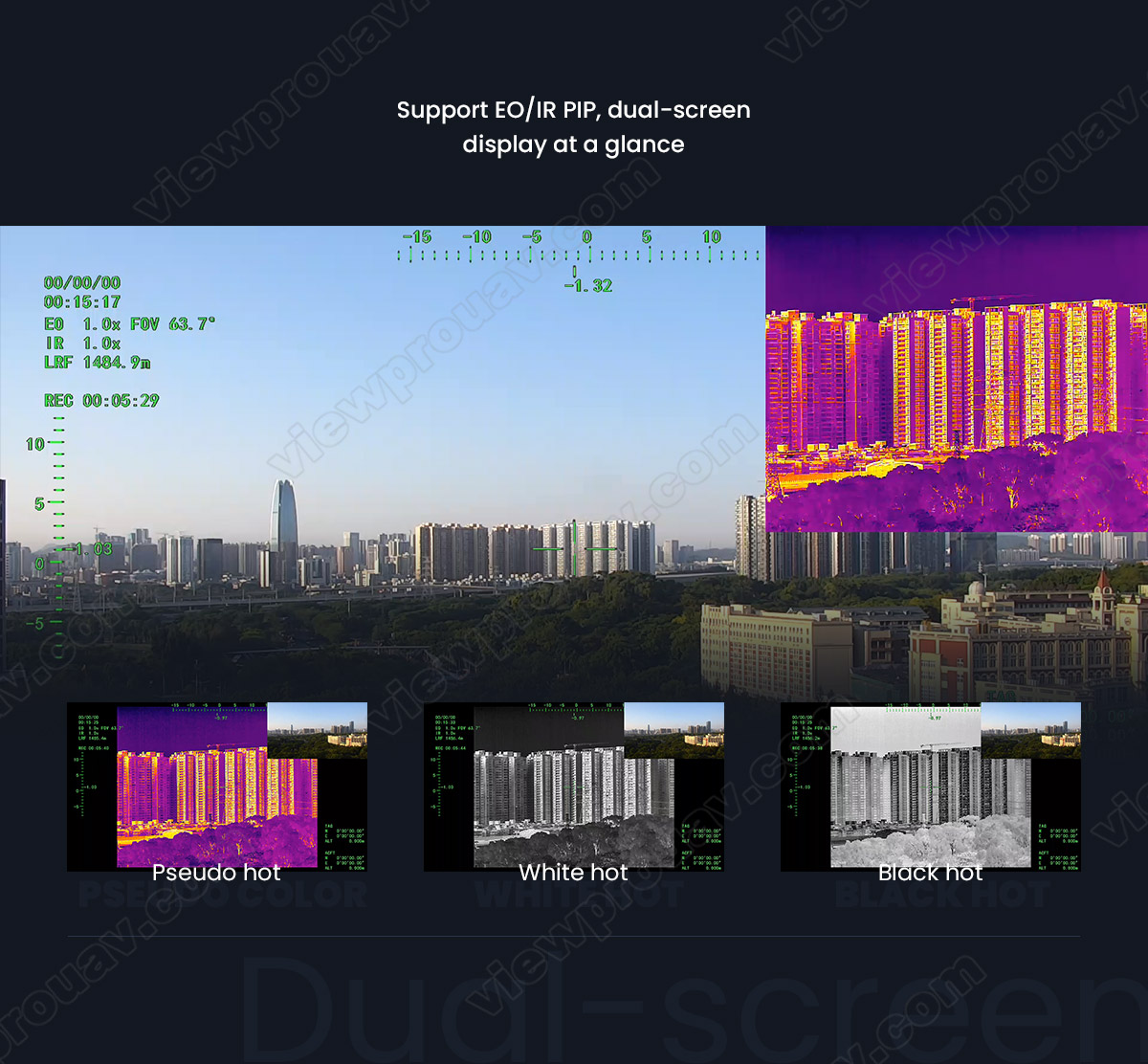
| פלטת צבעים | לבן חם, שחור חם, צבע מדומה |
| זום דיגיטלי | 1x ~ 8x |
| סנכרן את השעה הנכונה | כן |
| מעקב אחר אובייקטים באמצעות מצלמת EO/IR | |
| קצב עדכון של סטיית פיקסל | 30 הרץ |
| עיכוב פלט של פיקסל סטייה | <30 מילי-שניות |
| ניגודיות מינימלית של אובייקטים | 5% |
| SNR | 4 |
| גודל מינימלי של אובייקט | 16*16 פיקסלים |
| גודל אובייקט מרבי | 256*256 פיקסלים |
| מהירות מעקב | ±48 פיקסל/פריים |
| זמן זיכרון אובייקט | 100 פריימים |
| מד טווח לייזר IR | |
| יכולת מדידה | ≥5 ק"מ עבור יעד גדול (למשל, בניין) ≥3 ק"מ למכונית (2.3 מ' × 2.3 מ') ≥1.5 ק"מ לאנשים (1.75 מ' × 0.75 מ') (בהתבסס על ערך טיפוסי: |
| דיוק (ערך טיפוסי) | ≤ ±1 מטר (RMS) |
| אורך גל | לייזר פולס 1535 ננומטר |
| זווית סוטה | ≤ 0.5mrad |
| תדירות המדידה | 1~10 הרץ |
| טווח מדידה מינימלי | ≤20 מטר |
| החלטה | ≤ 50m (multiple targets) |
| רנפנדר | מדידת מרחק היעד |
| ביצועי AI של מצלמת EO | |
| סוג היעדים | מכונית ואדם |
| כמות זיהוי סימולטני | ≥ 10 יעדים |
| יחס ניגודיות מינימלי | 5% |
| גודל מינימלי | 5×5 פיקסלים |
| שיעור זיהוי מכוניות | ≥85% |
| שיעור אזעקות שווא | ≤10% |
| מידע על אריזה | |
| N.W. | 1485g (Viewport version) |
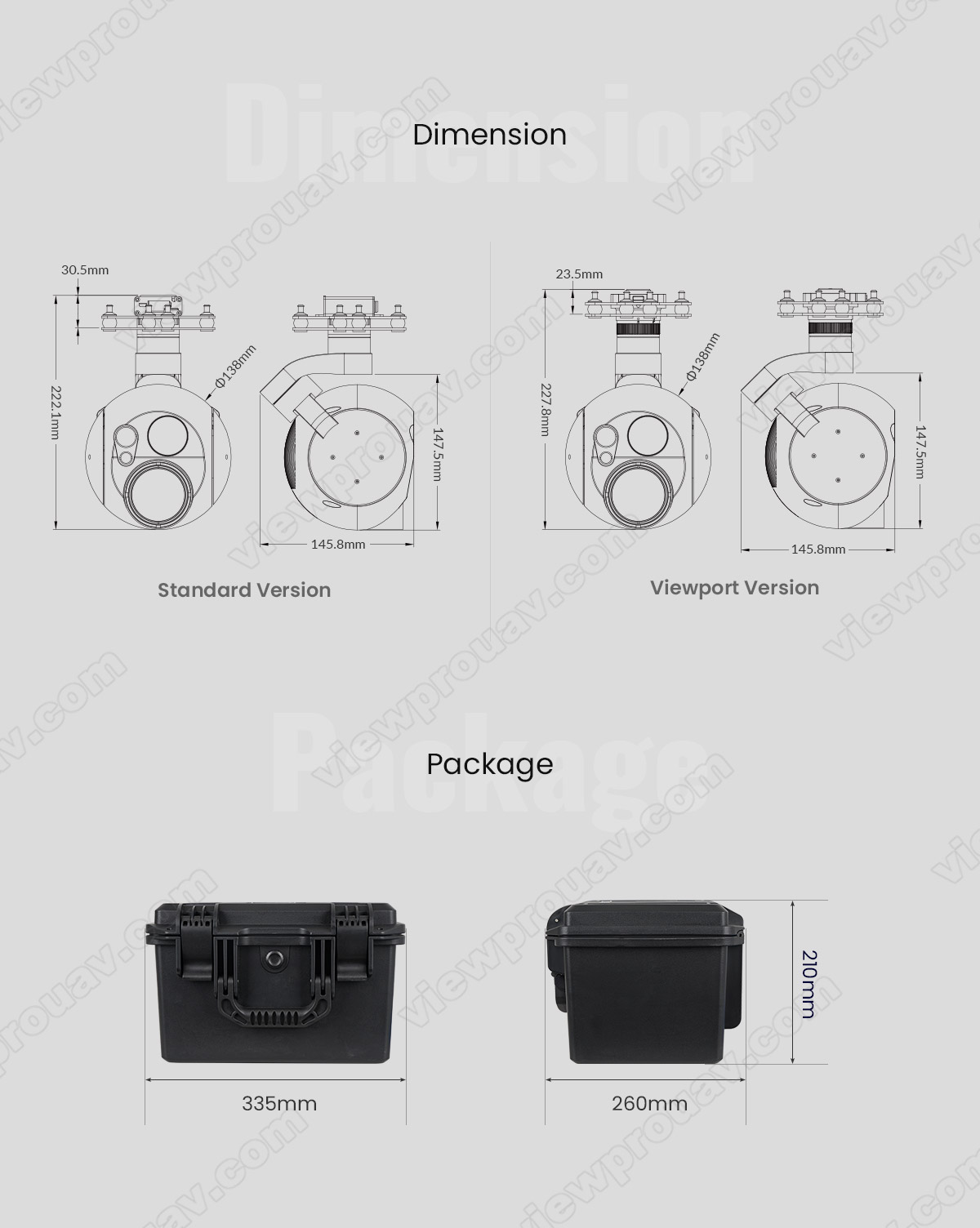
| מידות המוצר. | 145.8*138*222.1mm (Standard version) / 145.8*138*227.8mm (Viewport version) |
| אביזרים | 1pc gimbal מצלמה, ברגים, צילינדרים נחושת, כדורי שיכוך, 1pc USB ל-TTL כבל / תיבת פלסטיק באיכות גבוהה עם כרית קצף |
| G.W. | 3632g |
| מידות החבילה. | 350*300*250 מ"מ |
| משקל | 1 ק"ג |
|---|
היה הראשון לכתוב סקירה “A30TR-50 5km Laser Rangefinder EO/IR Camera with AI Auto-Identify and Track Targets”
עליך להתחבר כדי לפרסם ביקורת.
מוצרים קשורים


גימבלים ומטען
Q30TIR-1352 מצלמת גימבל חזקה בעלת 3 צירים חיישן תרמי כפול IR לבדיקה תעשייתית / חיפוש / כיבוי אש
€21,449.00










גימבלים ומטען
Z36T Cube מצלמה עם זום 36x מותאמת ג'ימבל מקצועי בעל 3 צירים ומצלמת מעקב FOC מדויקת ביותר
€4,499.00




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
חוות דעת
אין עדיין חוות דעת.