



















| פרמטר חומרה | |
| מתח עבודה | 16V |
| מתח כניסה | 4S ~ 6S (14.8V~25.2V) |
| זרם דינמי | 450~750mA @ 16V |
| צריכת חשמל | Average 7.2W, Max 12W |
| טמפרטורת סביבת העבודה. | -20℃ ~ +50℃ |
| פלט | IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| אחסון מקומי | SD card (Up to 256G,class 10, FAT32) |
| פורמט אחסון תמונות | JPG (1920*1080) |
| פורמט אחסון וידאו | MP4 (1080P 30fps) |
| שיטת בקרה | TTL או S.BUS (בחר אחד מהם, וברירת המחדל היא TTL), ו-TCP/UDP |
| מפרט גימבל | |
| טווח מכני | Pitch/Tilt: -48°(Up)~125°(Down), Roll: ±60°, Yaw/Pan: ±150° |
| טווח שליטה | Pitch/Tilt: -45°~120°, Yaw/Pan: ±145° |
| זווית הרטט | שיפוע/גלגול/סטייה: ±0.02° |
| מקש אחד למרכז | √ |
| מפרט מצלמת EO | |
| חיישן הדמיה | חיישן CMOS בגודל 1/2.9 אינץ' |
| פיקסל תמונה | 2 מגה-פיקסל |
| איכות תמונה | Full HD 1080 (1920*1080) |
| עדשה | אורך מוקד 6 מ"מ |
| זום דיגיטלי | 1x~12x |
| זווית ראייה (D,H,V) | שדה ראייה: D 60° H 50° V 28° |
| מפרט מצלמת תרמית IR | |
| אורך מוקד | 13mm |
| Aperture | F1.2 |
| שדה ראייה אופקי | 33° |
| שדה ראייה אנכי | 26° |
| מרחק זיהוי (גבר: 1.8×0.5 מטר) | 542 meters |
| זיהוי מרחק (גבר: 1.8×0.5 מטר) | 135 meters |
| מרחק מאומת (גבר: 1.8×0.5 מטר) | 68 meters |
| מרחק בלשי (מכונית: 4.2×1.8 מ') | 1661 meters |
| זיהוי מרחק (מכונית: 4.2×1.8 מטר) | 415 meters |
| מרחק מאומת (מכונית: 4.2×1.8 מטר) | 208 meters |
| מצב עבודה | מצלמה תרמית VOx ארוכת גל (8μm~14μm) ללא קירור |
| פיקסל גלאי | 640*512 |
| גודל פיקסל | 12 מיקרומטר |
| שיטת מיקוד | עדשה ראשית אטמית |
| NETD | ≤[email protected] @25℃ |
| פלטת צבעים | White,black,pseudo color |
| זום דיגיטלי | 1x~8x |
| Radiometric function(Optional) | Thermometry range optional:-20℃~+150℃, +100℃~+550℃ |
| Thermometry accuracy: ±3℃ or +3%(take larger value)@ambient temperature -20℃~+60℃ | |
| מעקב אחר אובייקטים באמצעות מצלמת EO/IR | |
| קצב עדכון של סטיית פיקסל | 30 הרץ |
| עיכוב פלט של פיקסל סטייה | <30 מילי-שניות |
| ניגודיות מינימלית של אובייקטים | 5% |
| SNR | 4 |
| גודל מינימלי של אובייקט | 16*16 פיקסלים |
| גודל אובייקט מרבי | 256*256 פיקסלים |
| מהירות מעקב | ±48 פיקסל/פריים |
| זמן זיכרון אובייקט | 100 פריימים |
| EO/IR Camera AI Performance | |
| סוג היעדים | מכונית ואדם |
| כמות זיהוי סימולטני | ≥ 10 יעדים |
| יחס ניגודיות מינימלי | 5% |
| גודל מינימלי | 5×5 פיקסלים |
| שיעור זיהוי מכוניות | ≥85% |
| שיעור אזעקות שווא | ≤10% |
| תכונות | |
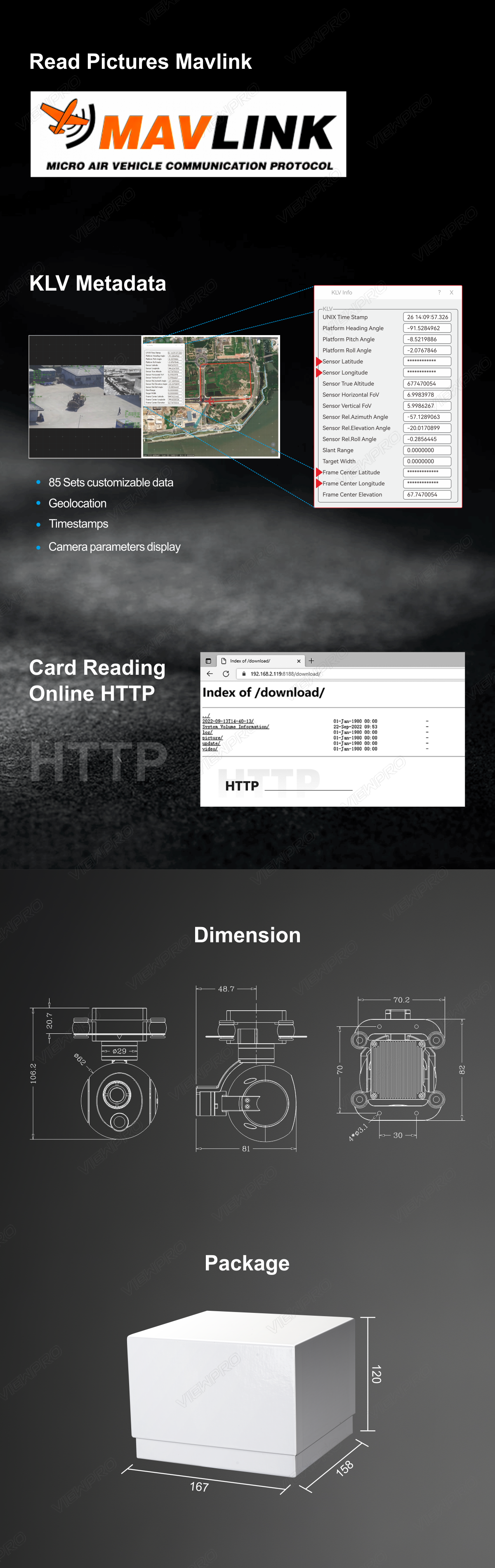
| OSD | הצגת זווית הסבסוב וההטיה של הגימבל, הגדלה, משך ההקלטה בכרטיס, GPS וגובה המטוס, תאריך ושעה |
| תיוג גיאוגרפי | הצגת זמן ונקודת ציון GPS בתמונה exif |
| קריאת קלפים באינטרנט | HTTP קורא תמונות או קטעי וידאו |
| KLV (UDP) | הקלטה בכרטיס או השמעת וידאו ב-Viewlink |
| ArduPilot / PX4 | תמיכה (פרוטוקול Mavlink) אופציונלי: תמיכה בתכונת "עקוב אחרי" של Ardupilot |
| תפירת וידאו | EO+IR /IR+EO /EO /IR |
| Dual video stream output (optional) | Support(EO and IR two stream output, notes: unable to record once the dulal video stream output activated) |
| מידע על אריזה | |
| N.W. | 238±10g |
| מידות המוצר. | 81*62*106.2mm |
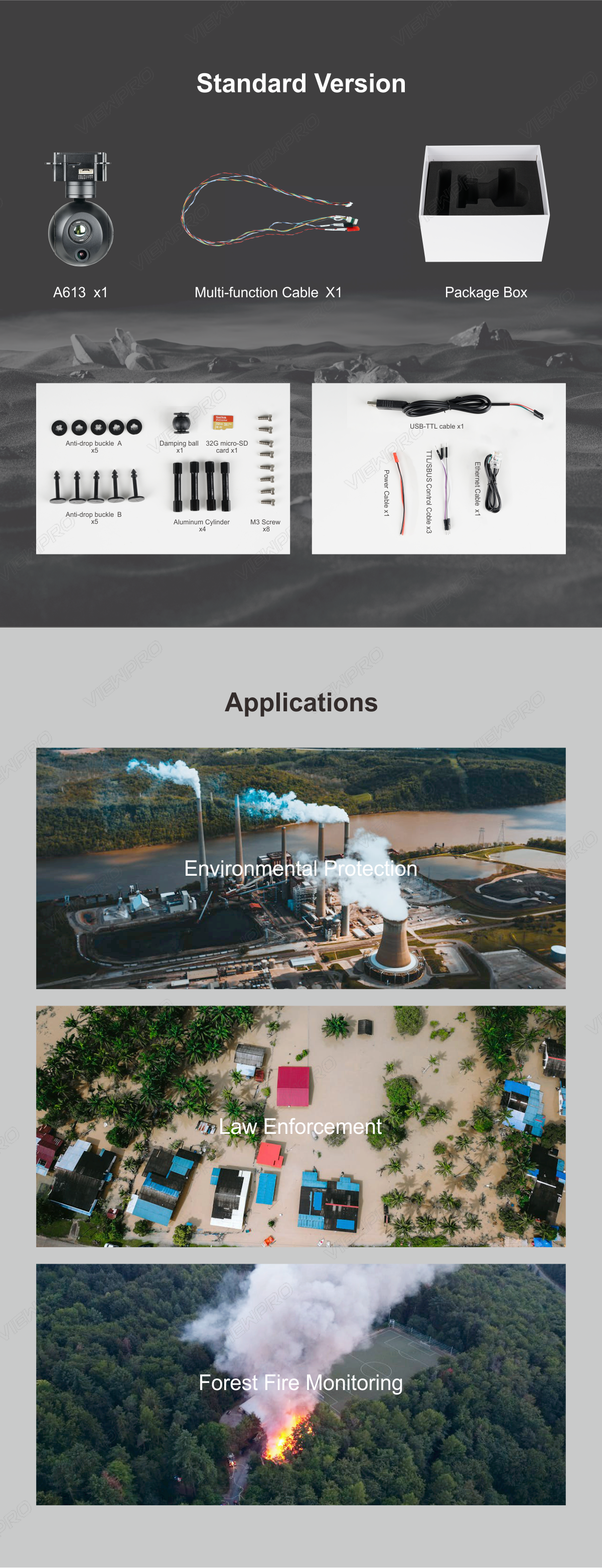
| אביזרים | screws, USB to TTL cable,power cable,Multi-function cable,Ethernet cable, Hight quality box with foam cushion |
| G.W. | 610g |
| מידות החבילה. | 162*132*100mm |
| משקל | 1 ק"ג |
|---|
היה הראשון לכתוב סקירה “A613 Mini3-AixsStabilizerPrimeLens EO/IRAITrackingThermalImagerGimbalCamera”
עליך להתחבר כדי לפרסם ביקורת.
מוצרים קשורים






גימבלים ומטען
Z36T Cube מצלמה עם זום 36x מותאמת ג'ימבל מקצועי בעל 3 צירים ומצלמת מעקב FOC מדויקת ביותר
€4,499.00




€4,499.00




גימבלים ומטען
ZIR1352T תוכנת FOC מקצועית בעלת 3 צירים ודיוק גבוה עם מצלמת זום תרמית כפולה ברזולוציה גבוהה
€12,799.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
חוות דעת
אין עדיין חוות דעת.