

















| פרמטר חומרה | |
| מתח עבודה | 16V |
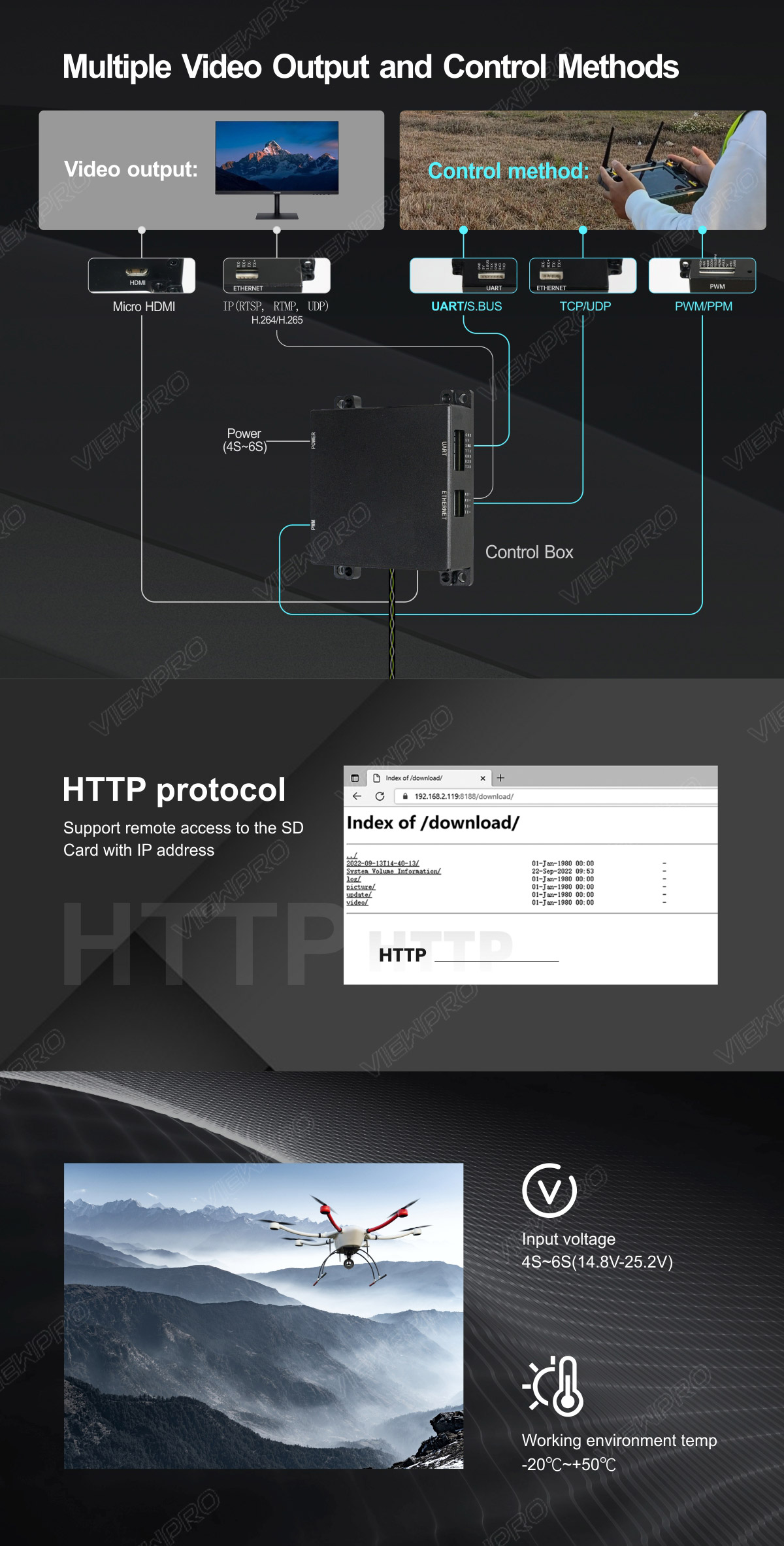
| מתח כניסה | 4S ~ 6S (14.8V~25.2V) |
| מתח יציאה | 5V (חיבור עם PWM) |
| זרם דינמי | 500~1000mA @ 16V |
| צריכת חשמל | Average 8W, Max 16W |
| טמפרטורת סביבת העבודה. | -20℃ ~ +50℃ |
| פלט | Micro HDMI(1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| אחסון מקומי | כרטיס TF (עד 256G, מחלקה 10, פורמט FAT32) |
| פורמט אחסון תמונות בכרטיס TF | JPG (1920*1080) |
| פורמט אחסון וידאו בכרטיס TF | MP4 (1080P 30fps) |
| שיטת בקרה | PWM / TTL / S.BUS / TCP / UDP |
| מפרט גימבל | |
| טווח מכני | Pitch/Tilt: -110°(Up)~130°(Down), Roll: ±40°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| טווח שליטה | הטיה/הטיה: -45°~125°, סיבוב/פאן: ±290° / ±360°*N (גרסת פלט IP) |
| זווית הרטט | שיפוע/גלגול/סטייה: ±0.02° |
| מקש אחד למרכז | √ |
| IR Thermal Imager 1 Spec | |
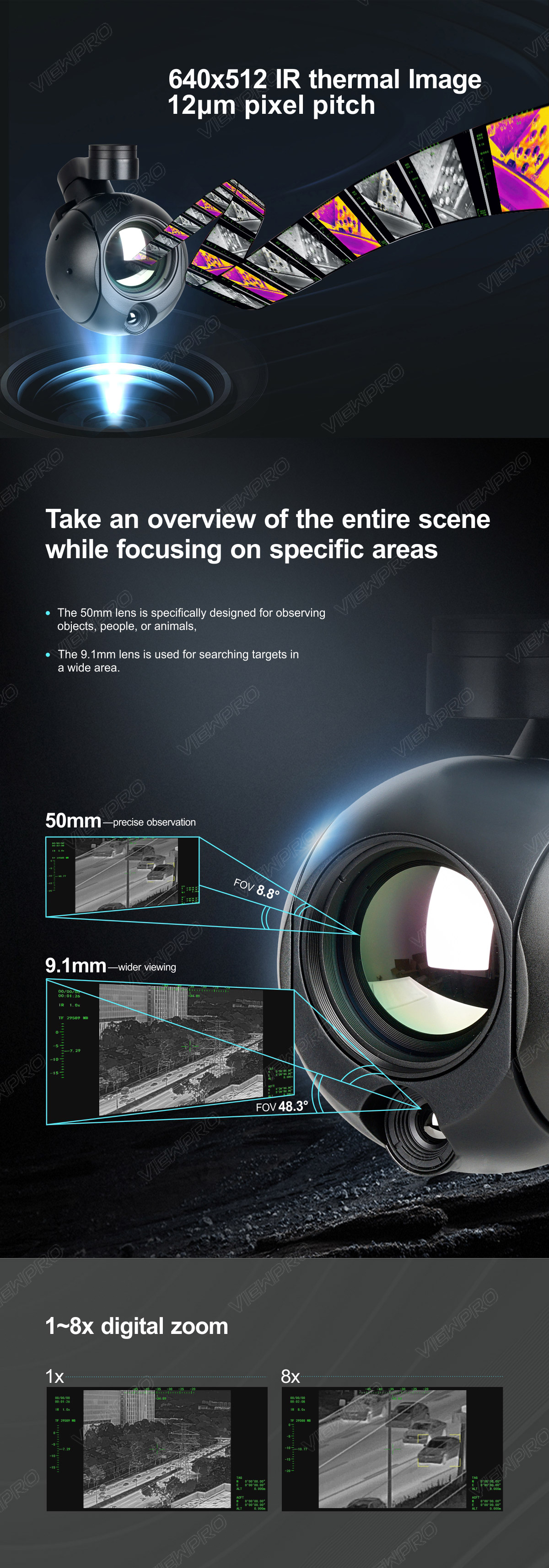
| אורך מוקד | 50 מ"מ |
| Aperture | F1.0 |
| שדה ראייה אופקי | 8.7° |
| שדה ראייה אנכי | 7.0° |
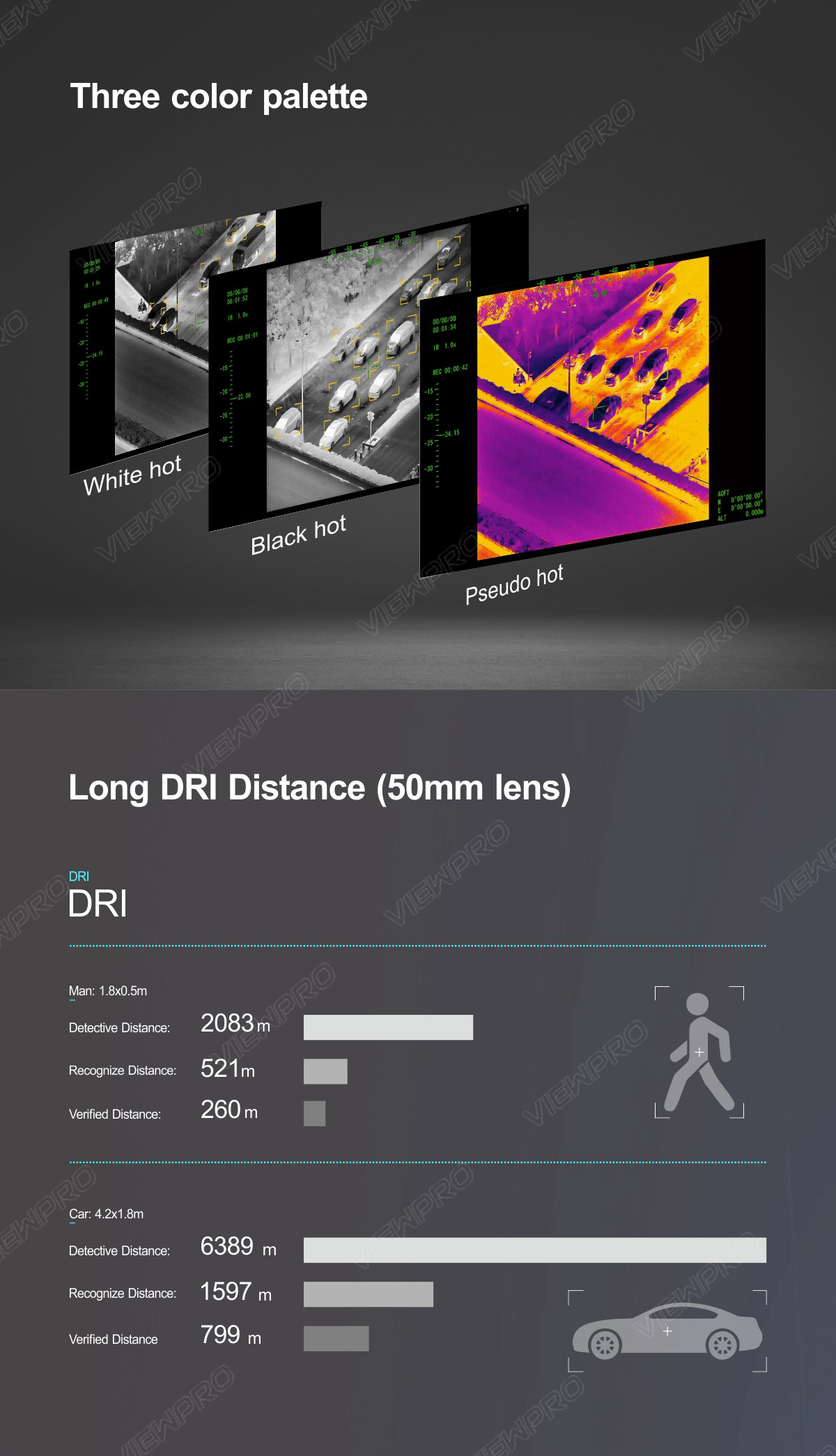
| מרחק זיהוי (גבר: 1.8×0.5 מטר) | 2083 מטרים |
| זיהוי מרחק (גבר: 1.8×0.5 מטר) | 521 מטרים |
| מרחק מאומת (גבר: 1.8×0.5 מטר) | 260 מטרים |
| מרחק בלשי (מכונית: 4.2×1.8 מ') | 6389 מטרים |
| זיהוי מרחק (מכונית: 4.2×1.8 מטר) | 1597 מטרים |
| מרחק מאומת (מכונית: 4.2×1.8 מטר) | 799 מטרים |
| מצב עבודה | מצלמה תרמית VOx ארוכת גל (8μm~14μm) ללא קירור |
| פיקסל גלאי | 640*512 |
| מרווח פיקסלים | 12 מיקרומטר |
| שיטת מיקוד | עדשה ראשית אטמית |
| NETD | ≤[email protected] @25℃ |
| פלטת צבעים | לבן חם, שחור חם, צבע מדומה |
| זום דיגיטלי | 1x ~ 8x |
| IR Thermal Imager 2 Spec | |
| אורך מוקד | 9.1mm |
| Aperture | F1.0 |
| שדה ראייה אופקי | 48.3° |
| שדה ראייה אנכי | 38.6° |
| מרחק זיהוי (גבר: 1.8×0.5 מטר) | 379 meters |
| זיהוי מרחק (גבר: 1.8×0.5 מטר) | 95 meters |
| מרחק מאומת (גבר: 1.8×0.5 מטר) | 47 meters |
| מרחק בלשי (מכונית: 4.2×1.8 מ') | 1163 meters |
| זיהוי מרחק (מכונית: 4.2×1.8 מטר) | 291 meters |
| מרחק מאומת (מכונית: 4.2×1.8 מטר) | 145 meters |
| מצב עבודה | מצלמה תרמית VOx ארוכת גל (8μm~14μm) ללא קירור |
| פיקסל גלאי | 640*512 |
| גודל פיקסל | 12 מיקרומטר |
| שיטת מיקוד | עדשה ראשית אטמית |
| NETD | ≤[email protected] @25℃ |
| פלטת צבעים | לבן חם, שחור חם, צבע מדומה |
| מעקב אחר אובייקטים באמצעות מצלמת IR | |
| קצב עדכון של סטיית פיקסל | 30 הרץ |
| עיכוב פלט של פיקסל סטייה | <30 מילי-שניות |
| ניגודיות מינימלית של אובייקטים | 5% |
| SNR | 4 |
| גודל מינימלי של אובייקט | 16*16 פיקסלים |
| גודל אובייקט מרבי | 256*256 פיקסלים |
| מהירות מעקב | ±48 פיקסל/פריים |
| זמן זיכרון אובייקט | 100 פריימים |
| ביצועי AI של מצלמת IR | |
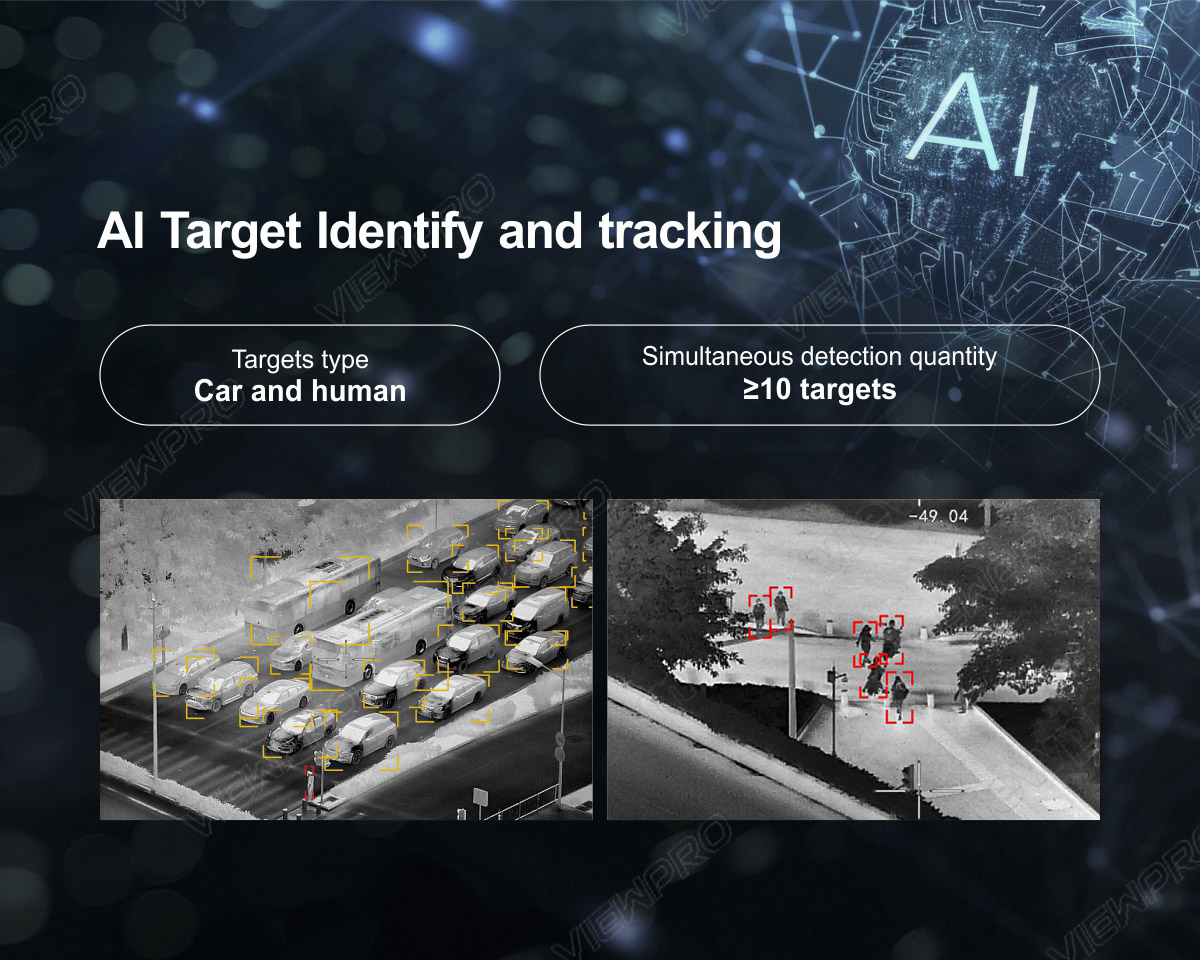
| סוג היעדים | מכונית ואדם |
| כמות זיהוי סימולטני | ≥ 10 יעדים |
| יחס ניגודיות מינימלי | 5% |
| גודל מינימלי | 5×5 פיקסלים |
| שיעור זיהוי מכוניות | ≥85% |
| שיעור אזעקות שווא | ≤10% |
| תכונות | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, date and time |
| תיוג גיאוגרפי | הצגת זמן ונקודת ציון GPS בתמונה exif |
| קריאת קלפים באינטרנט | HTTP קורא תמונות או קטעי וידאו |
| KLV (UDP) | הקלטה בכרטיס או השמעת וידאו ב-Viewlink |
| ArduPilot / PX4 | תמיכה (פרוטוקול Mavlink) אופציונלי: תמיכה בתכונת "עקוב אחרי" של Ardupilot |
| תפירת וידאו | IR1+IR2 / IR2+IR1 / IR1 / IR2 |
| Dual video stream output (optional) | Support( IR1 and IR2 two stream output, notes: unable to record once the dulal video stream output activated) |
| מידע על אריזה | |
| N.W. | 720±10g(Viewport version with Viewport) |
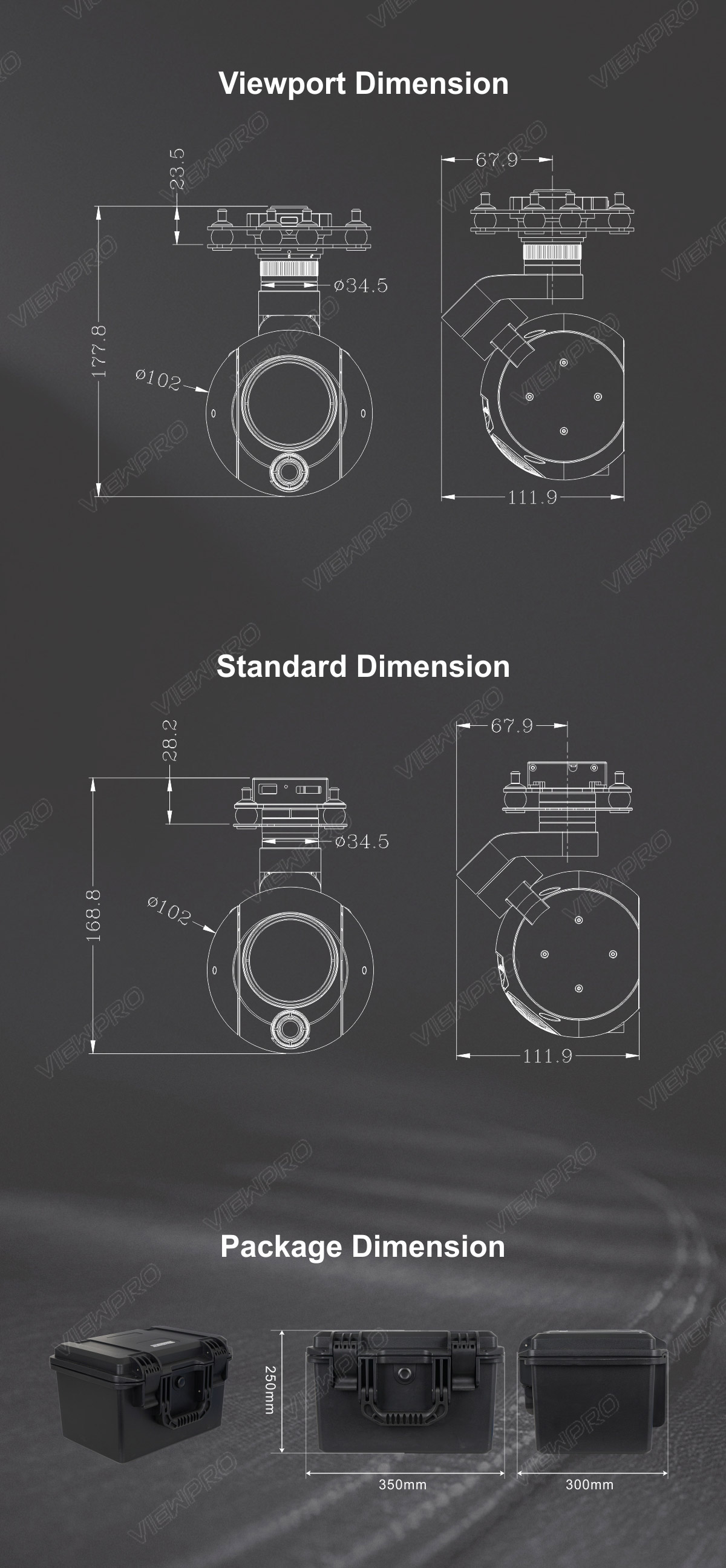
| מידות המוצר. | 114.5*105*171.8mm / 114.5*105*180.8mm (Viewport version with Viewport) |
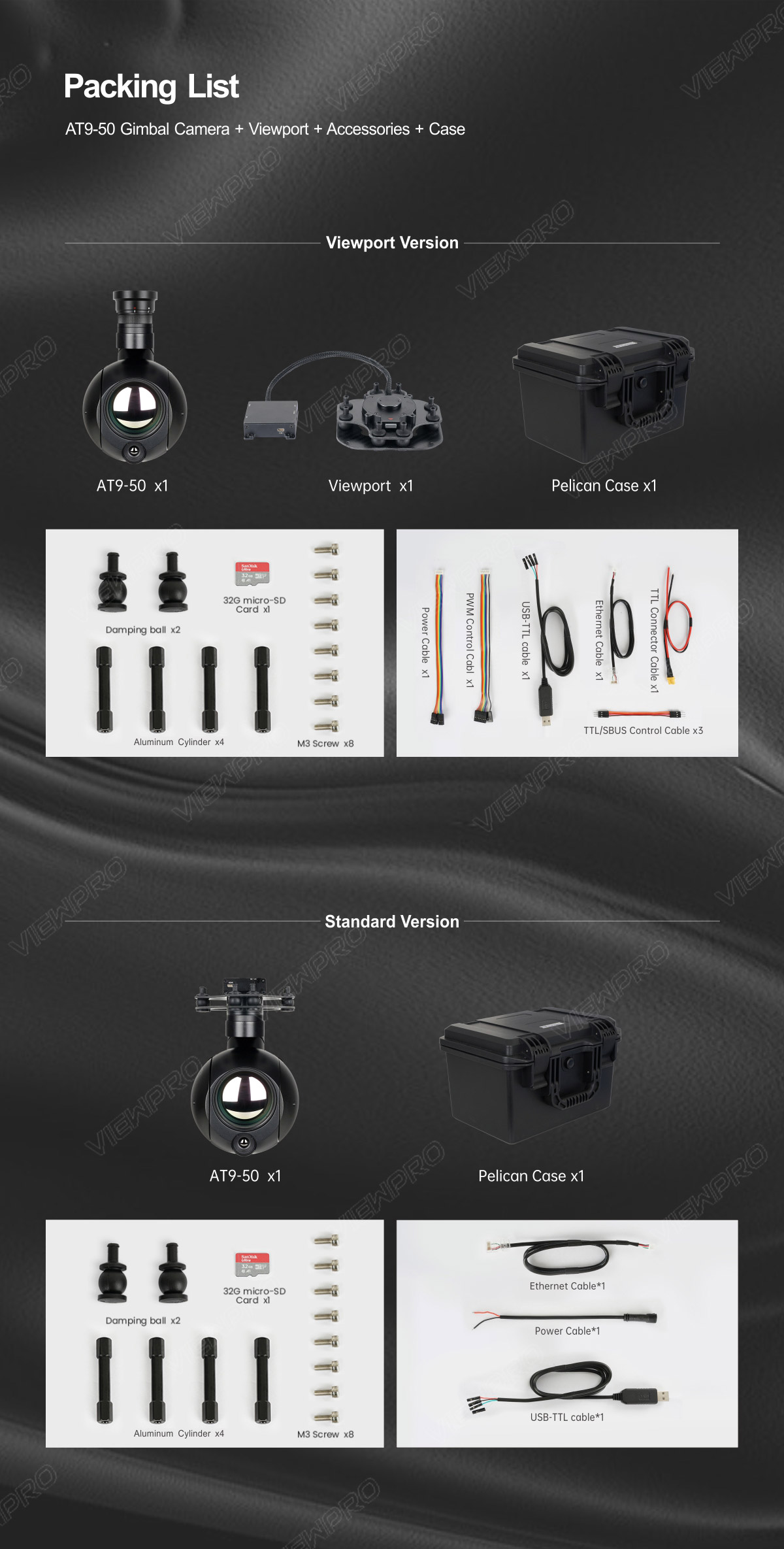
| אביזרים | 1pc gimbal camera device, screws, aluminum cylinders, damping balls, damping boards, 1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| G.W. | 1820g |
| מידות החבילה. | 300*250*200 מ"מ |
| משקל | 1 ק"ג |
|---|
היה הראשון לכתוב סקירה “AT9-50 Dual IR 5x Thermal Zoom FOV Flexibility Gimbal Camera”
עליך להתחבר כדי לפרסם ביקורת.
מוצרים קשורים


גימבלים ומטען
Q30TIR-1352 מצלמת גימבל חזקה בעלת 3 צירים חיישן תרמי כפול IR לבדיקה תעשייתית / חיפוש / כיבוי אש
€21,449.00


גימבלים ומטען
Z36T Cube מצלמה עם זום 36x מותאמת ג'ימבל מקצועי בעל 3 צירים ומצלמת מעקב FOC מדויקת ביותר
€4,499.00




גימבלים ומטען
VO305 UH הגדרה מצלמה אלכסונית תלת-ממדית מיפוי אווירי וסקרים באמצעות כלי טיס בלתי מאוישים
€44,599.99








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
גימבלים ומטען
Z40K מצלמת גימבל 4K HD עם זום 25x, גימבל תלת-צירי, צילום אווירי, קרטוגרפיה וסיור פיקוח
€3,749.00
חוות דעת
אין עדיין חוות דעת.