


















| פרמטר חומרה | |
| מתח עבודה | 16V |
| מתח כניסה | 4S ~ 6S (14.8V~25.2V) |
| מתח יציאה | 5V (חיבור עם PWM) |
| זרם דינמי | 750–1500 מילי-אמפר ב-16 וולט |
| צריכת חשמל | ממוצע 12 וואט, מקסימום 24 וואט |
| טמפרטורת סביבת העבודה. | -20℃ ~ +50℃ |
| פלט (אופציונלי) | מיקרו HDMI (1080p, 60 fps) / IP (RTSP/UDP, 720p/1080p, 25 fps/30 fps, H.264/H.265) / SDI (1080p, 30 fps) |
| אחסון מקומי | כרטיס SD (עד 512G, מחלקה 10, פורמט FAT32) |
| פורמט אחסון תמונות בכרטיס TF | JPG (1920*1080) |
| פורמט אחסון וידאו בכרטיס TF | MP4 (1080P 30fps) |
| קריאת קלפים באינטרנט | SMB קורא תמונות או קטעי וידאו / HTTP קורא תמונות או קטעי וידאו |
| שיטת בקרה | PWM / TTL / S.BUS / TCP / UDP |
| תיוג גיאוגרפי | תמיכה, זמן תצוגה וקוורדינטות GPS בתמונה exif |
| מפרט גימבל | |
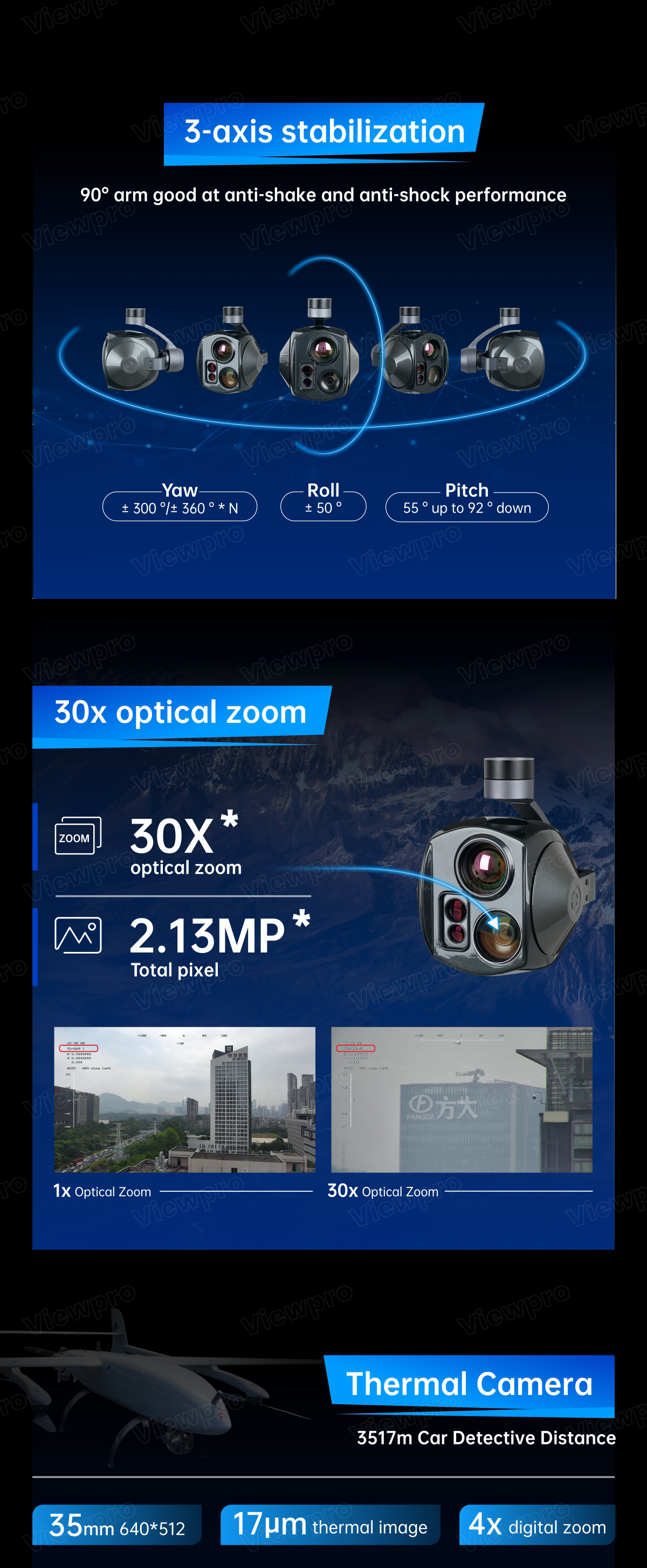
| טווח מכני | הטיה/שיפוע: -55°~92°, גלגול: ±50°, סיבוב/פאן: ±300° / ±360°*N (גרסת פלט IP / SDI) |
| טווח שליטה | הטיה/הטיה: -45°~90°, סיבוב/פאן: ±290° / ±360°*N (גרסת פלט IP / SDI) |
| זווית הרטט | שיפוע/גלגול/סטייה: ±0.02° |
| מקש אחד למרכז | √ |
| מפרט מצלמת EO | |
| חיישן הדמיה | חיישן CMOS מסוג STARVIS2 1/2.8 |
| איכות תמונה | Full HD 1080 (1920*1080) |
| פיקסל אפקטיבי | 2.13 מגה-פיקסל |
| זום אופטי של העדשה | 30x, F=4.3~129 מ"מ |
| זום דיגיטלי | 12x (360x עם זום אופטי) |
| מרחק מינימלי מהאובייקט | 10 מ"מ (קצה רחב) עד 1200 מ"מ (קצה טלסקופי) |
| זווית צפייה אופקית | 64.0° (קצה רחב) ~ 2.4° (קצה טלסקופי) |
| מערכת סנכרון | פנימי |
| יחס אות לרעש | יותר מ-50dB |
| מינימום תאורה | צבע 0.009 לוקס (1/30 שניות, 50%, מצב רגישות גבוהה מופעל) |
| צבע 0.09 לוקס (1/30 שניות, 50%, מצב רגישות גבוהה כבוי) | |
| בקרת חשיפה | אוטומטי, ידני, מצב עדיפות (עדיפות תריס ועדיפות צמצם), פיצוי EV, AE איטי |
| רווח | אוטומטי/ידני 0dB עד 50.0dB (0 עד 28 שלבים) מגבלת רווח מקסימלי 10.7 dB עד 50.0dB (6 עד 28 שלבים) |
| איזון לבן | אוטומטי, ATW, פנים, חוץ, WB בלחיצה אחת, WB ידני, אוטומטי חוץ, מנורת אדי נתרן (קבוע/אוטומטי/אוטומטי חוץ) |
| מהירות תריס | 1/1 עד 1/10,000, 22 שלבים |
| פיצוי תאורה אחורית | כן |
| Defog | כן |
| מפרט מצלמת תרמית IR | |
| אורך מוקד | 35 מ"מ |
| שדה ראייה אופקי (°) | 12.5° |
| שדה ראייה אנכי (°) | 10.0° |
| שדה ראייה אלכסוני (°) | 16.0° |
| מרחק זיהוי (גבר: 1.8×0.5 מטר) | 1458 מטרים |
| זיהוי מרחק (גבר: 1.8×0.5 מטר) | 365 מטרים |
| מרחק מאומת (גבר: 1.8×0.5 מטר) | 182 מטרים |
| מרחק בלשי (מכונית: 4.2×1.8 מ') | 4472 מטרים |
| זיהוי מרחק (מכונית: 4.2×1.8 מטר) | 1118 מטרים |
| מרחק מאומת (מכונית: 4.2×1.8 מטר) | 559 מטרים |
| מצב עבודה | מצלמה תרמית ללא קירור לגלים ארוכים (8μm~14μm) |
| פיקסל גלאי | 640*512 |
| מרווח פיקסלים | 12 מיקרומטר |
| שיטת מיקוד | עדשה ראשית אטמית |
| תיקון מקדם פליטה | 0.01~1 |
| NETD | ≤50mK (ב-25℃) |
| MRTD | ≤650mK (בתדר אופייני) |
| שיפור תמונה | התאמה אוטומטית של בהירות התמונה ויחס הניגודיות |
| פלטת צבעים | לבן, אדום ברזל, צבע מדומה |
| תיקון אוטומטי לא אחיד | כן (ללא תריס) |
| זום דיגיטלי | 1x ~ 4x |
| סוג מדחום | לא תומך |
| מד טווח לייזר | |
| אורך גל לייזר | 1550 ננומטר |
| צמצם אופטי | שידור 13 מ"מ / קליטה 17 מ"מ |
| החלטה | 0.75 מטר |
| יכולת מדידה | 3000 מטר (ערך אופייני 1: גודל האובייקט: שטח היעד גדול משטח נקודת הלייזר; מקדם החזרה: 60%; דיוק: 90%; ראות: 10 ק"מ; טמפרטורת הסביבה: 20 מעלות צלזיוס; לחץ אטמוספרי: 1013 מבר) |
| מדידת יעד הרכב | 2300 מ' (ערך טיפוסי 2: גודל האובייקט: 2.3*2.3 מ' מקדם פליטה: 30% שאר הפרמטרים זהים לערך הטיפוסי 1) |
| בטוח לעיניים | דרגה 1【תקן IEC 60825-1, מהדורה שנייה (2007-03)】 |
| זווית קרן הלייזר (ערך אופייני) | 1.0 מ"רד |
| דיוק (ערך אופייני) | ± 0.75 מ' |
| דיוק (בתנאים קשים) | ± 2 מ' |
| תדירות המדידה | 2 הרץ |
| רזולוציית האובייקט (ערך אופייני) | 30 מטר |
| מעקב אחר אובייקטים באמצעות מצלמת EO/IR | |
| קצב עדכון של סטיית פיקסל | 50 הרץ |
| עיכוב פלט של פיקסל סטייה | 5 מילי-שניות |
| ניגודיות מינימלית של אובייקטים | 5% |
| SNR | 4 |
| גודל מינימלי של אובייקט | 32*32 פיקסלים |
| גודל אובייקט מרבי | 128*128 פיקסלים |
| מהירות מעקב | ±48 פיקסל/פריים |
| זמן זיכרון אובייקט | 100 פריימים (4 שניות) |
| ערכי השורש הריבועי הממוצע של רעש הדופק במיקום האובייקט | < 0.5 פיקסל |
| תכונות | |
| OSD | הצגת זווית הסבסוב והשיפוע של הגימבל, הגדלה, ערך המרחק, משך ההקלטה בכרטיס, נתוני ה-GPS והגובה של כלי הטיס או נתוני ה-GPS והגובה של נקודת המרחק של המטרה (יש לבחור באחד מהם, או בנתוני ה-GPS והגובה של נקודת המרחק של המטרה), תאריך ושעה |
| תיוג גיאוגרפי | הצגת זמן ונקודת ציון GPS בתמונה exif |
| קריאת קלפים באינטרנט | SMB קורא תמונות או קטעי וידאו / HTTP קורא תמונות או קטעי וידאו |
| KLV (UDP) | הקלטה בכרטיס או השמעת וידאו ב-Viewlink |
| ArduPilot / PX4 | תמיכה (פרוטוקול Mavlink) אופציונלי: תמיכה בתכונת "Follow me" של Ardupilot |
| תפירת וידאו | EO+IR /IR+EO /EO /IR |
| פלט זרם וידאו כפול | לא נתמך (פלט שני זרמים EO ו-IR) |
| מידע על אריזה | |
| N.W. | 1116 גרם / 1163 גרם (גרסת Viewport עם Viewport) |
| מידות המוצר. | 165.1*130.6*203.2 מ"מ / 165.1*130.6*208.9 מ"מ (גרסת Viewport עם Viewport) |
| אביזרים | 1pc gimbal מצלמה, ברגים, צילינדרים נחושת, כדורי שיכוך, 1pc USB ל-TTL כבל / תיבת פלסטיק באיכות גבוהה עם כרית קצף |
| G.W. | 3518 גרם |
| מידות החבילה. | 360×300×250 מ"מ |
| משקל | 1 ק"ג |
|---|
היה הראשון לכתוב סקירה “Q30TIRM Pro 30x Zoom EO/IR 3KM High-level Laser Rangefinder Object Tracking Camera”
עליך להתחבר כדי לפרסם ביקורת.
מוצרים קשורים


€4,499.00














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
חוות דעת
אין עדיין חוות דעת.