

















| Hardware-Parameter | |
| Betriebsspannung | 16V |
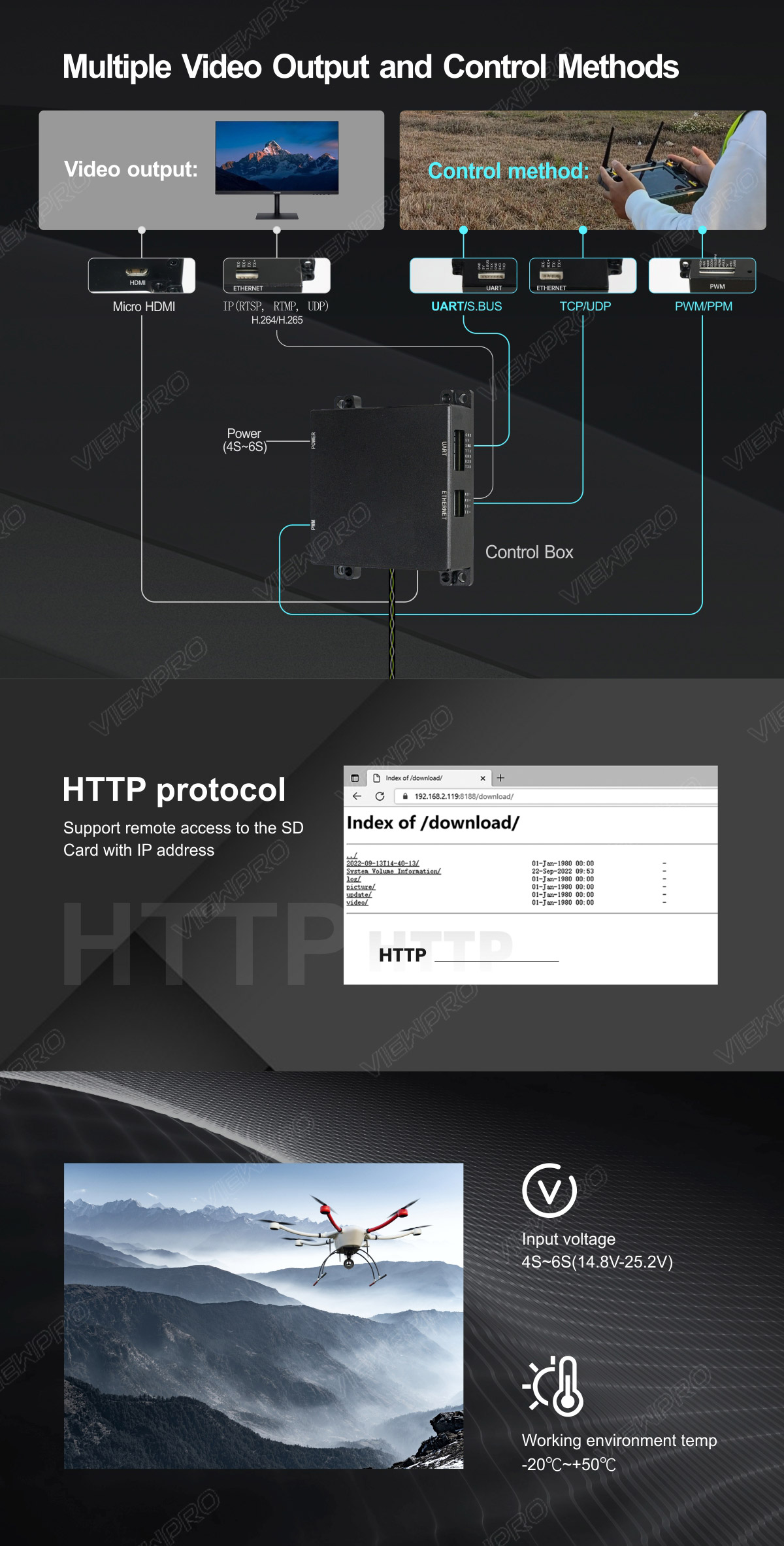
| Eingangsspannung | 4S ~ 6S (14.8V~25.2V) |
| Ausgangsspannung | 5V (Verbindung mit PWM) |
| Dynamischer Strom | 500~1000mA @ 16V |
| Power consumption | Average 8W, Max 16W |
| Arbeitsumgebung temp. | -20℃ ~ +50℃ |
| Ausgabe | Micro HDMI(1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Lokaler Speicher | TF card (Up to 256G, class 10, FAT32 format) |
| Picture storage format in TF card | JPG(1920*1080) |
| Video storage format in TF card | MP4(1080P 30fps) |
| Kontrollmethode | PWM / TTL / S.BUS / TCP / UDP |
| Kardanische Spezifikation | |
| Mechanischer Bereich | Pitch/Tilt: -110°(Up)~130°(Down), Roll: ±40°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Kontrollierbarer Bereich | Pitch/Tilt: -45°~125°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| Schwingungswinkel | Pitch/Roll/Yaw: ±0.02° |
| Ein-Schlüssel-Zentrum | √ |
| IR Thermal Imager 1 Spec | |
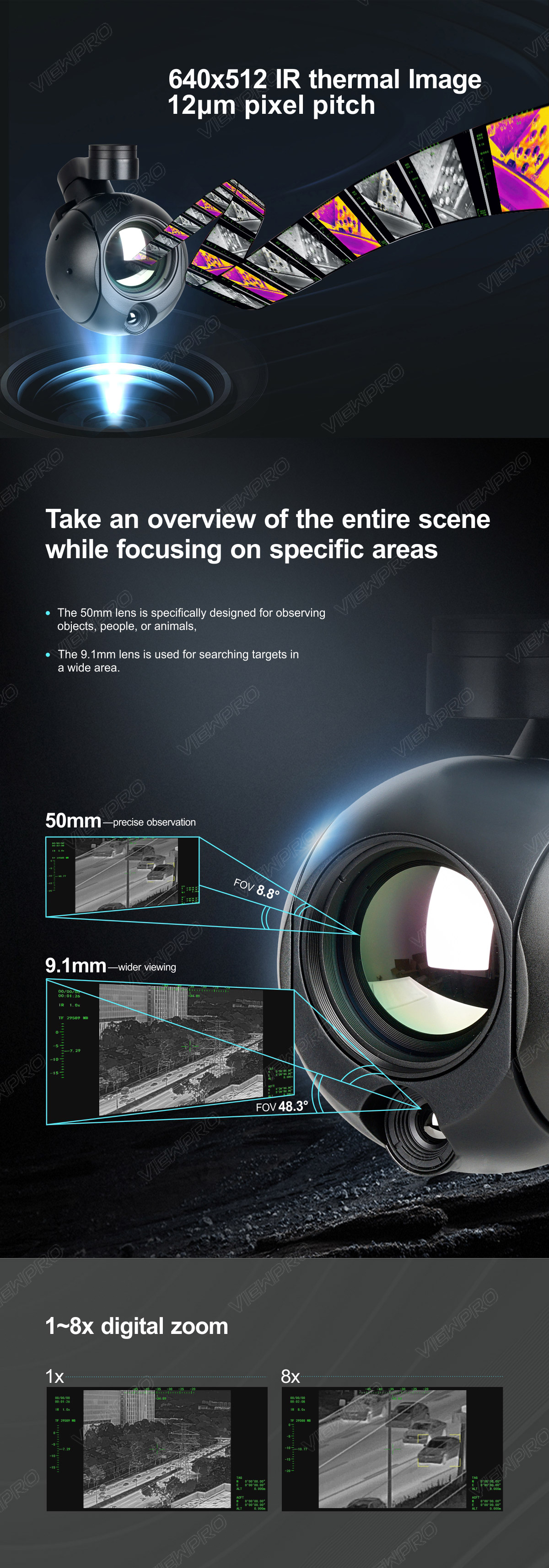
| Fokus Länge | 50mm |
| Aperture | F1.0 |
| Horizontales FOV | 8.7° |
| Vertikales FOV | 7.0° |
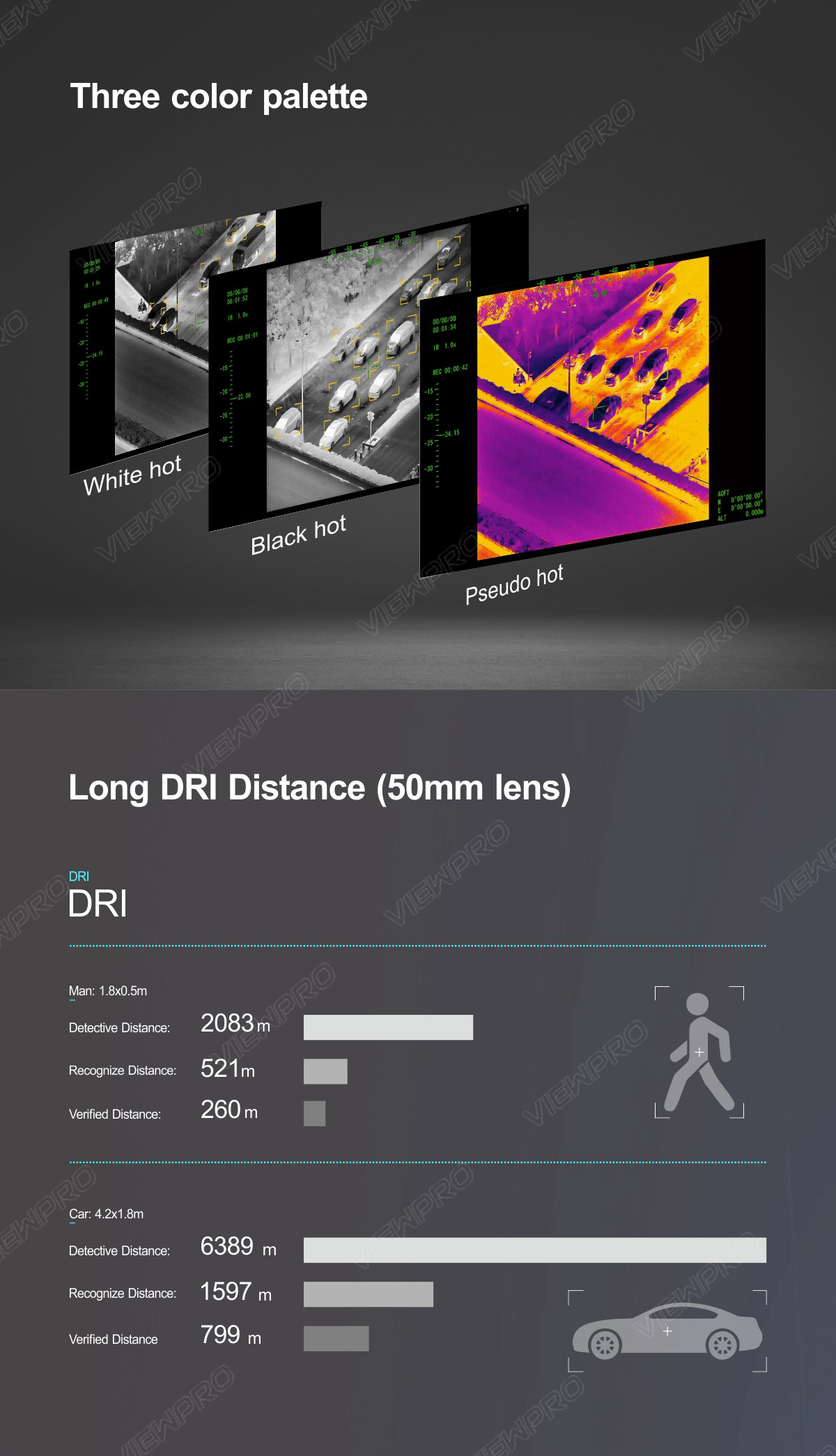
| Erkennungsweite (Mann: 1,8×0,5m) | 2083 meters |
| Entfernung erkennen (Mensch: 1,8×0,5m) | 521 meters |
| Geprüfte Entfernung (Mann: 1,8×0,5m) | 260 meters |
| Erkennungsweite (Auto: 4,2×1,8m) | 6389 meters |
| Entfernung erkennen (Auto: 4,2×1,8m) | 1597 meters |
| Geprüfte Entfernung (Auto: 4,2×1,8m) | 799 meters |
| Arbeitsmodus | Ungekühlte VOx-Langwellen-Wärmebildkamera (8μm~14μm) |
| Detektor-Pixel | 640*512 |
| Pixel pitch | 12μm |
| Methode der Fokussierung | Athermal Prime Objektiv |
| NETD | ≤[email protected] @25℃ |
| Farbpalette | White hot, black hot, pseudo color |
| Digitaler Zoom | 1x ~ 8x |
| IR Thermal Imager 2 Spec | |
| Fokus Länge | 9.1mm |
| Aperture | F1.0 |
| Horizontales FOV | 48.3° |
| Vertikales FOV | 38.6° |
| Erkennungsweite (Mann: 1,8×0,5m) | 379 meters |
| Entfernung erkennen (Mensch: 1,8×0,5m) | 95 meters |
| Geprüfte Entfernung (Mann: 1,8×0,5m) | 47 meters |
| Erkennungsweite (Auto: 4,2×1,8m) | 1163 meters |
| Entfernung erkennen (Auto: 4,2×1,8m) | 291 meters |
| Geprüfte Entfernung (Auto: 4,2×1,8m) | 145 meters |
| Arbeitsmodus | Ungekühlte VOx-Langwellen-Wärmebildkamera (8μm~14μm) |
| Detektor-Pixel | 640*512 |
| Pixelgröße | 12μm |
| Methode der Fokussierung | Athermal Prime Objektiv |
| NETD | ≤[email protected] @25℃ |
| Farbpalette | White hot, black hot, pseudo color |
| IR Camera Object Tracking | |
| Aktualisierungsrate des Abweichungspixels | 30Hz |
| Ausgangsverzögerung des Abweichungspixels | <30ms |
| Minimaler Objektkontrast | 5% |
| SNR | 4 |
| Minimale Objektgröße | 16*16 Pixel |
| Maximale Objektgröße | 256*256 Pixel |
| Verfolgungsgeschwindigkeit | ±48 Pixel/Bild |
| Objektspeicherzeit | 100 Bilder |
| IR Camera AI Performance | |
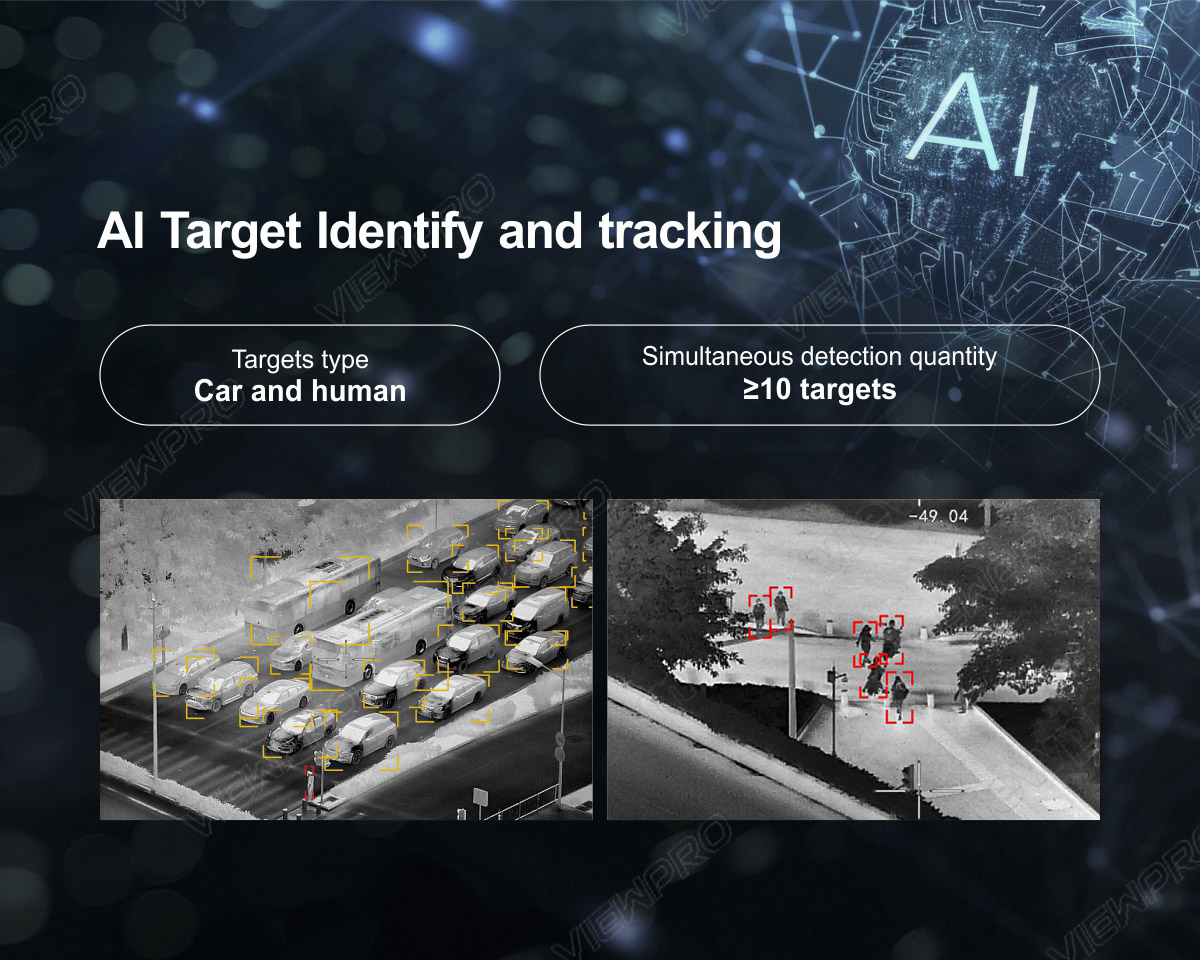
| Targets type | Car and human |
| Simultaneous detection quantity | ≥ 10 targets |
| Min contrast ratio | 5% |
| Min target size | 5×5 pixel |
| Car detection rate | ≥85% |
| False alarm rate | ≤10% |
| Features | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, date and time |
| Geotagging | Display time and GPS coordinate in picture exif |
| Kartenlegen online | HTTP read pictures or videos |
| KLV (UDP) | Card recording or Viewlink video playback |
| ArduPilot / PX4 | Support(Mavlink protocol ) Optional: Support Ardupilot Follow me feature |
| Video stitching | IR1+IR2 / IR2+IR1 / IR1 / IR2 |
| Dual video stream output (optional) | Support( IR1 and IR2 two stream output, notes: unable to record once the dulal video stream output activated) |
| Informationen zum Verpacken | |
| N.W. | 720±10g(Viewport version with Viewport) |
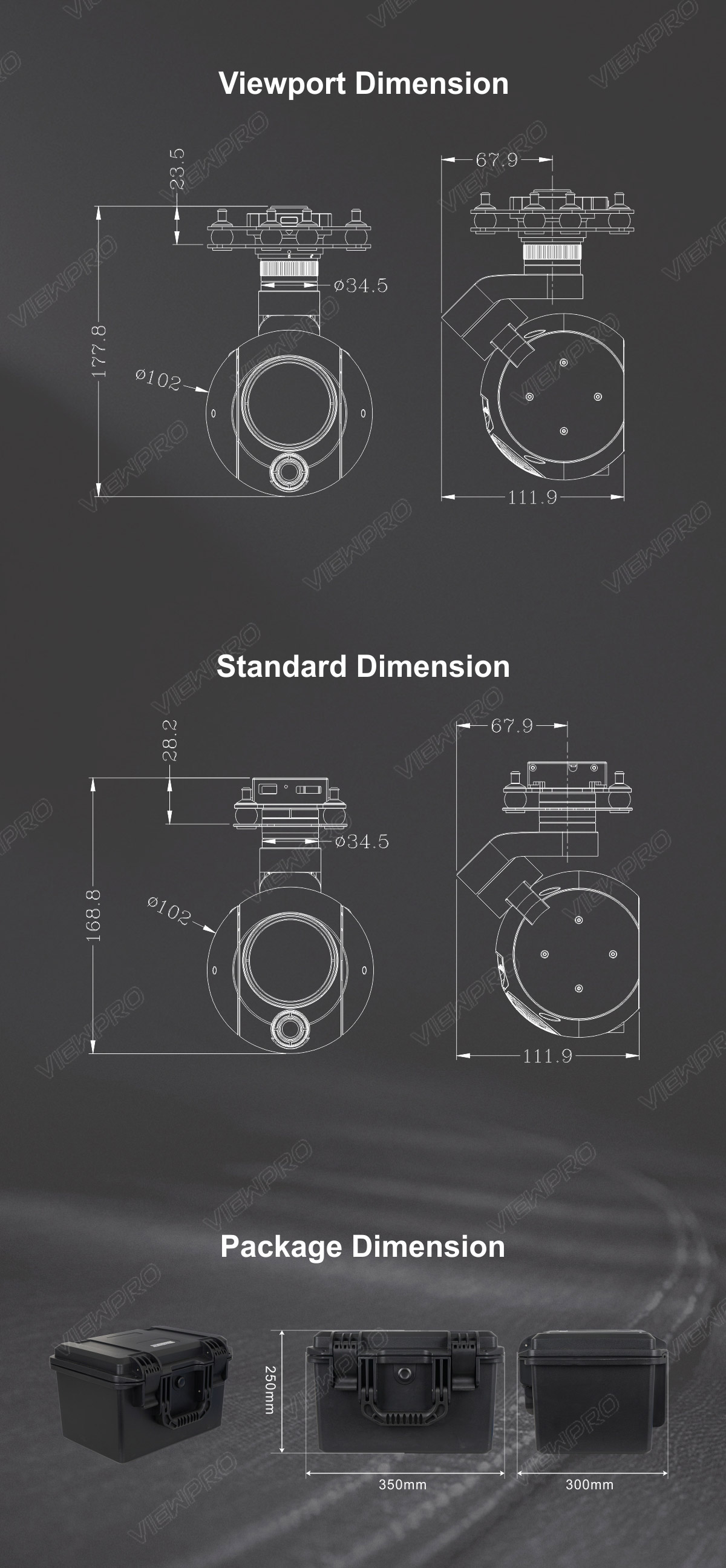
| Produktbezeichnung. | 114.5*105*171.8mm / 114.5*105*180.8mm (Viewport version with Viewport) |
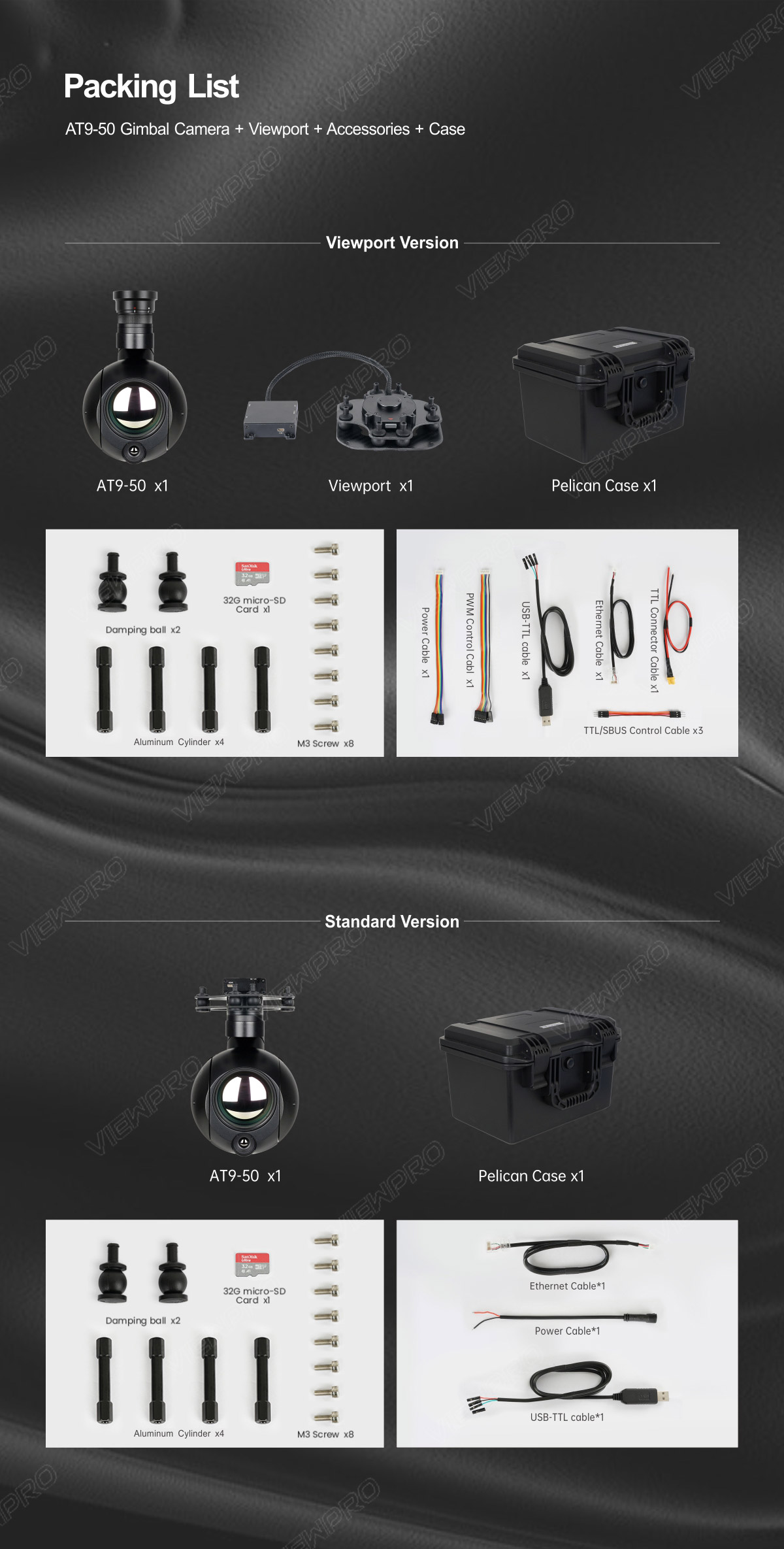
| Zubehör | 1pc gimbal camera device, screws, aluminum cylinders, damping balls, damping boards, 1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| G.W. | 1820g |
| Packungsgröße. | 300*250*200mm |
| Gewicht | 1 kg |
|---|
Schreibe die erste Bewertung für „AT9-50 Dual IR 5x Thermal Zoom FOV Flexibility Gimbal Camera“
Du musst angemeldet sein, um eine Bewertung abgeben zu können.
Ähnliche Produkte


Kardanische Aufhängung & Nutzlast


Kardanische Aufhängung & Nutzlast
U2 Ultra Light Weight Micro Prime LensDual EO Sensors FHD 1080P Object Tracking Gimbal Kamera


Kardanische Aufhängung & Nutzlast


Kardanische Aufhängung & Nutzlast


Kardanische Aufhängung & Nutzlast
Q30TIRM Pro 30x Zoom EO/IR 3KM High-level Laser Rangefinder Objektverfolgungskamera


Kardanische Aufhängung & Nutzlast
Q30TIR lite 30x EO + 25mm IR Dual Sensor 3Achsen Gimbal Kamera für UAV


Kardanische Aufhängung & Nutzlast
U7DER /U7DE Micro Prime Lens Dual EO/IR Object Tracking Gimbal Kamera für Überwachungszwecke


Kardanische Aufhängung & Nutzlast
Q30T Pro II Kardanische Kamera mit 30fachem optischem Zoom und Objektverfolgung
Bewertungen
Es gibt noch keine Bewertungen.