













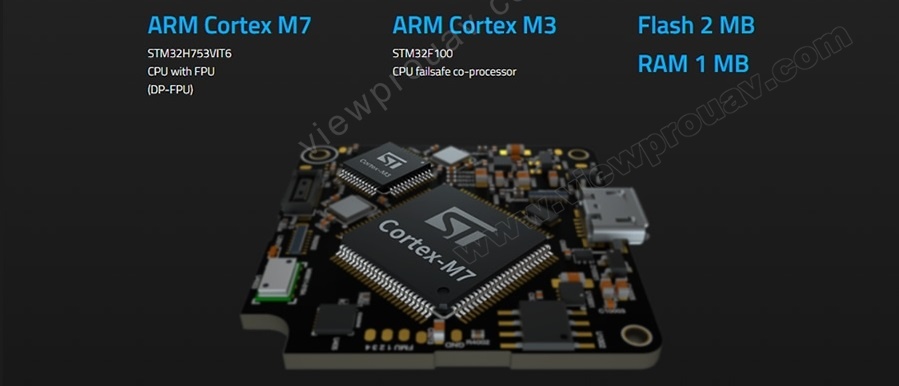
Ausgestattet mit dem leistungsstarken H7-Prozessor
Der H7 verfügt über eine Doppelpräzisions-FPU (DP), 1 MB RAM und einen 40-MHz-CPU-Prozessor, der eine hohe Leistung, einen extrem schnellen Betrieb und eine stabile Lösung für den Flugbetrieb bietet.
Situationswahrnehmung durch integriertes ADS-B
Ein kundenspezifischer 1090 MHz ADS-B-Empfänger von uAvionix wurde in die neue ADS-B-Trägerplatine integriert, die neue Funktionen ohne Vergrößerung bietet.UAVs, die mit der neuen Trägerplatine ausgestattet sind, können die Fluglage kommerzieller bemannter Flugzeuge im Bereich von ADS-B out empfangen. Dadurch wird der UAS-Betreiber effektiv informiert und kann die Risiken für den laufenden Betrieb einschätzen.

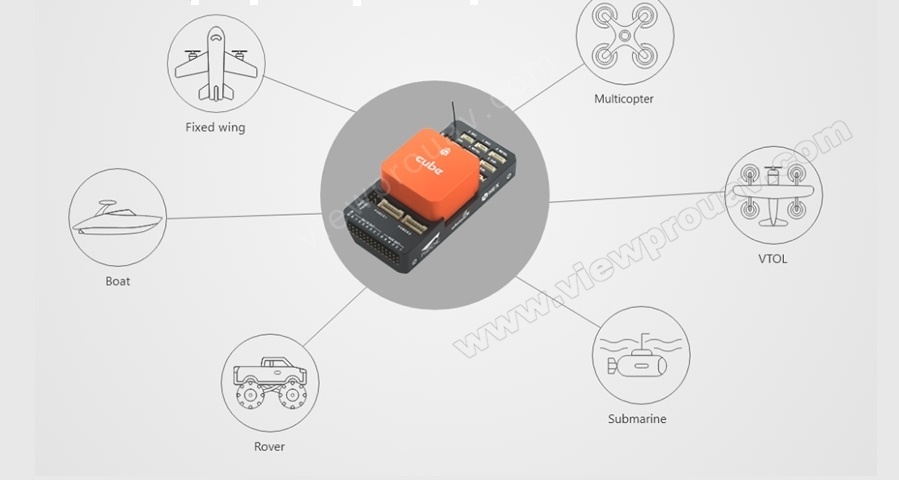
Unterstützung für mehrere Fahrzeugtypen
Einschließlich Hubschrauber, Multikopter, Starrflügler, VTOL, Rover, Boote, U-Boote, usw.
Dreifach redundantes IMU-System
Ausgestattet mit verbesserten Sensoren für ein zuverlässiges und sicheres System.

Einfaches Umschalten der PWM-Ausgangssignalspannung
Der PWM-Ausgang unterstützt die Umschaltung zwischen 3,3V und 5V Signalpegeln. Die Spannungsumschaltung kann über die Software der Bodenkontrollstation erfolgen. Dies verbessert die Kompatibilität mit verschiedenen externen Peripheriegeräten.

|
Hardware-Spezifikation |
||
|
Hauptprozessor |
STM32H753VIT6 |
|
|
Coprozessor |
STM32F1 |
|
|
Unterstützte RC-Signale |
PPM/SBUS/DSM |
|
|
Redundante Stromversorgung |
Dreifache Redundanz |
|
|
Sensoren |
Dreifach-LMU-System |
|
|
Details zu den Sensoren
|
ICM20649 (integrierter Beschleunigungsmesser und Gyroskop) |
|
|
ICM20602 (integrierter Beschleunigungsmesser und Gyroskop) |
||
|
ICM20948(integrierter Beschleunigungsmesser+Gyro+Magnetometer) |
||
|
MS5611x 2(Baro) |
||
|
Unterstützte Firmware |
Ardupilot und PX4 Open-Source-Flugsteuerungs-Firmware |
|
|
Unterstützte Fahrzeugtypen
|
Starrflügelflugzeuge |
|
|
Copter mit 3-8 Motoren |
||
|
HubschrauberVTOL-Flugzeuge |
||
|
Rover/Boote/Unterseeboote |
||
|
Spezifikation |
||
|
Gewicht |
73g |
|
|
Material Fahrgestell |
CNC-Aluminiumlegierung (Würfel)+ABS-Formteil (Trägerplatte) |
|
|
Größe
|
Würfel 38,4×38,4x22mm |
|
|
Trägerplatte 94,5×44,3×17,3mm |
||
|
Betriebstemperatur |
-10~+55°IMU mit Temperaturregelung |
|
|
PWM 1/Os |
14 |
|
|
Mavlink serielle Schnittstelle |
2 |
|
|
Anzahl der unterstützten GPS |
2 |
|
|
Debug-Schnittstelle |
1 |
|
|
12C-Schnittstelle |
1 |
|
|
CAN-Schnittstelle |
2 |
|
|
Hier2 gegen Hier3 |
||
|
Eigenschaften |
hara2 |
hara3 |
|
GNSS |
Ja |
Ja |
|
Kompass |
Ja |
Ja |
|
Protokoll |
12C,CAN |
CAN |
|
Echtzeit-Betriebssystem |
Ja |
Ja |
|
Firmware-Aktualisierung |
Ja |
Ja |
|
RTK |
Nein |
Ja |
|
Staubdicht, spritzwassergeschützt |
Nein |
Ja |
|
Spezifikation |
||
|
Typ des Empfängers |
u-blox M8 hochpräzise GNSS-Module (M8P) |
|
|
Satellitenkonstellation |
GPS L1C/A, GLONASSL10F, BeiDou B1l |
|
|
Ortungsgenauigkeit |
3D FIX: 2,5 m / RTK: 0,025 m |
|
|
Prozessor |
STM32F302 |
|
|
IMU-Sensor |
ICM20948 |
|
|
Aktualisierungsrate der Navigation |
Maximal:8Hz |
|
|
Kommunikationsprotokoll |
CAN |
|
|
0Betriebstemperatur |
-40°C bis 85°C |
|
|
Dimension |
76mm x 76mm x 16,6mm |
|
|
Gewicht |
48.8g |
|
| Gewicht | 1 kg |
|---|
Schreibe die erste Bewertung für „HEX Cube Orange Autopilot Open Source Drone Flight Control“
Du musst angemeldet sein, um eine Bewertung abgeben zu können.
Ähnliche Produkte



Flugsteuerung & GPS & RTK
VPS-381 PPK Luftgestützter GNSS-Empfänger Luftbildvermessung und -kartierung RTK PPK 2in1












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Bewertungen
Es gibt noch keine Bewertungen.