













| Hardware Parameters | |
| Tensión de trabajo | 16V |
| Tensión de entrada | 4S ~ 6S |
| Tensión de salida | 5V (conectar con PWM) |
| Corriente dinámica | 1200~2500mA @ 16V |
| Entorno de trabajo temp. | -20°C ~ +60°C |
| Salida de vídeo | micro HDMI (1080P 30/60fps) / IP Rtsp (720P/1080P 30fps) |
| Almacenamiento local | Tarjeta SD (hasta 128 G, clase 10, formato FAT32 o ex FAT) |
| Formato de almacenamiento de fotos | JPG (1920*1080) |
| Formato de almacenamiento de vídeo | MP4 (1080P 30fps) |
| Network reader | HTTP reading |
| Método de control | PWM / S.BUS / TTL / TCP(IP output version) / UDP(IP output version) |
| Gimbal Parameters | |
| Gama mecánica | Pitch/Tilt: -60°~130°, Roll: ±40°,Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Alcance controlable | Pitch/Tilt: -45°~90°,Yaw/Pan: ±290° / ±360°*N (IP output version) |
| Ángulo de vibración | Pitch/Roll/Yaw:±0.02° |
| Una tecla para centrar | √ |
| Camera Parameters | |
| Sensor de imágenes | 1/2.8″ Sony CMOS |
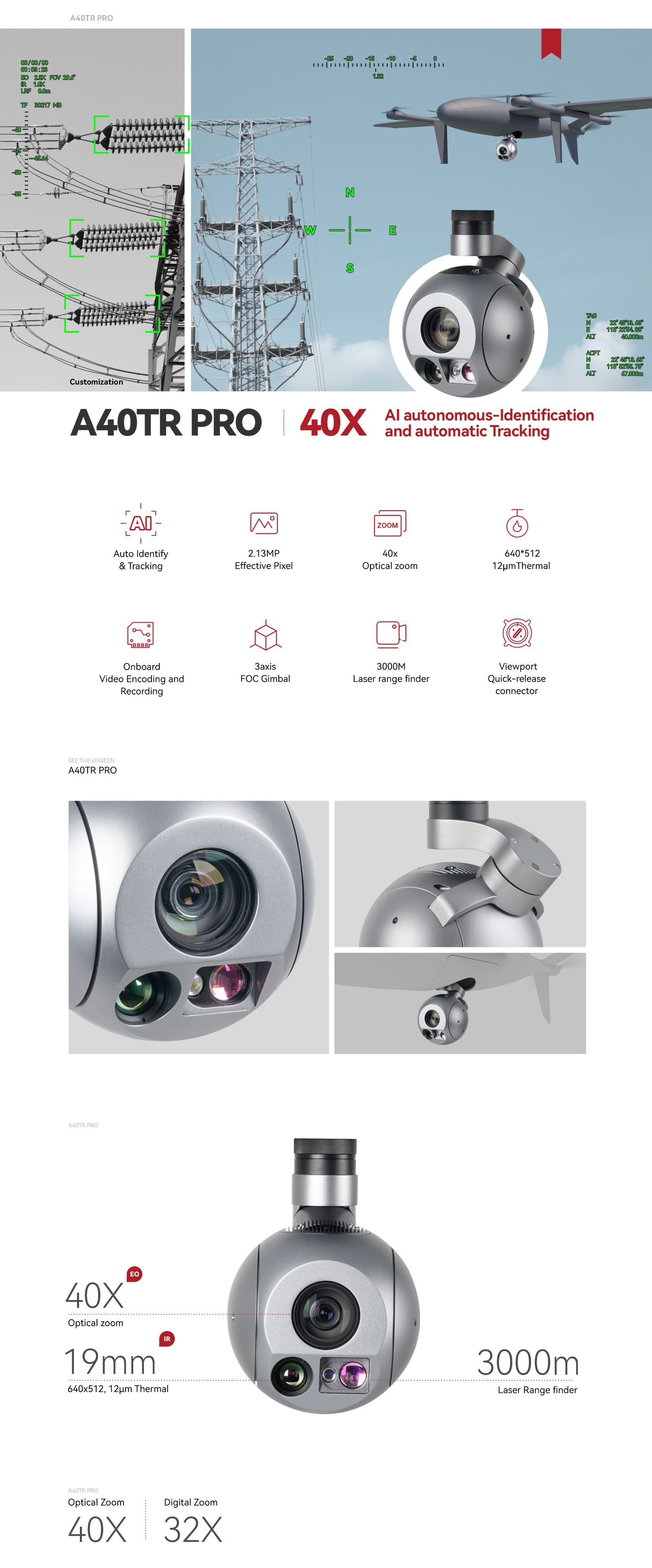
| Píxel efectivo | 5.13 MP |
| Lente | Optical zoom: 40x f = 4.25 mm (Wide), 170 mm (Tele) F1.6 to F4.95 |
| Zoom digital | 32x |
| Ángulo de visión ( H ) | 66.35°(Wide) ~ 1.9°(Tele) |
| Min. object distance | 0.1 / 1.5 / 3.0 / 5.0 / 10.0 m |
| Enfoque | Auto / One-click auto focus / Manual |
| Balance de blancos | Auto / Indoor / Outdoor / One-key / Manual |
| Velocidad de obturación | 1/1 to 1/30,000 S |
| Control de la exposición | Auto / Manual / Priority mode ( Shutter priority / Aperture priority ) |
| Sistema Sync | Interno |
| Compensación de contraluz | Sí |
| Auto ICR | Sí |
| Progressive scan | Sí |
| Image stabilizer | Sí |
| Modo desempañado | Sí |
| IR Thermal Imager Parameters | |
| Longitud de enfoque | 19 mm |
| Película de revestimiento | DLC |
| FOV horizontal | 22.9° |
| FOV vertical | 18.4° |
| FOV diagonal | 29.0° |
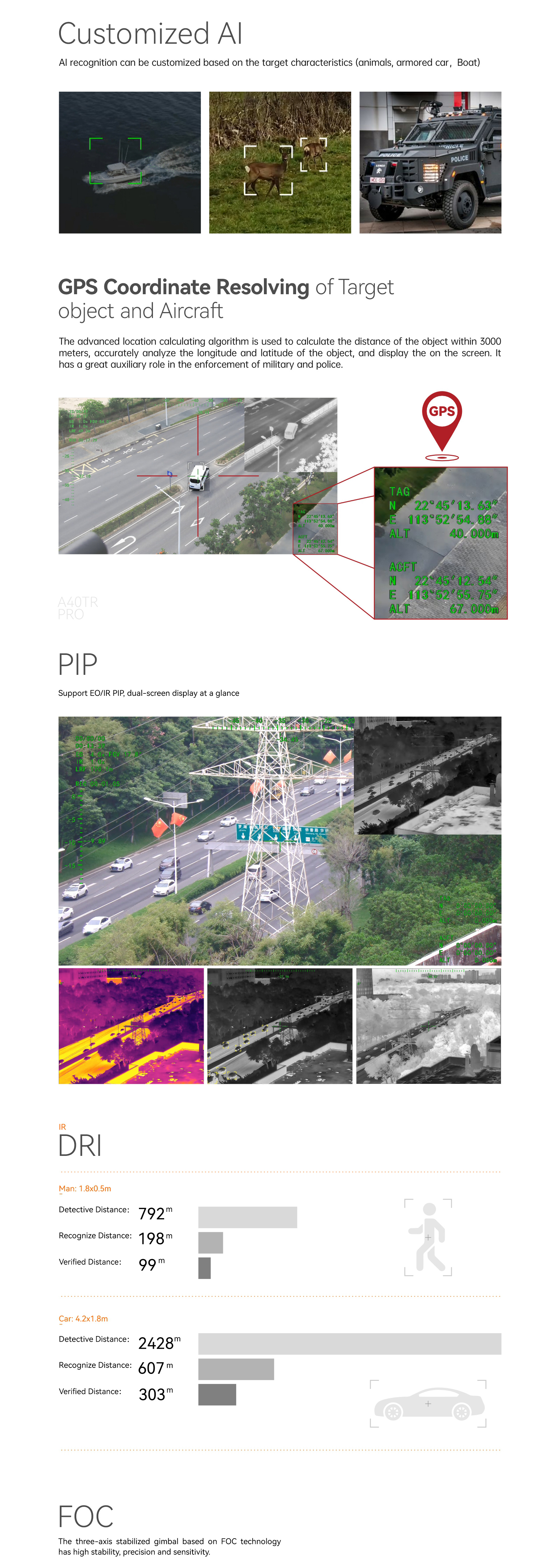
| Distancia de detección (Hombre: 1,8×0,5 m) | 792 metros |
| Reconocer distancia (Hombre: 1,8×0,5 m) | 198 metros |
| Distancia verificada (Hombre: 1,8×0,5 m) | 99 metros |
| Distancia de detección (coche: 4,2×1,8 m) | 2428 metros |
| Reconocer la distancia (Coche: 4,2×1,8 m) | 607 metros |
| Distancia verificada (coche: 4,2×1,8 m) | 303 metros |
| Modo de trabajo | Cámara termográfica de onda larga no refrigerada (8μm~14μm) |
| Píxel detector | 640*512 |
| Tamaño de píxel | 12μm |
| Método de enfoque | Objetivo de focal fija atérmico |
| NETD | ≤50mK @F.0 @25℃ |
| Paleta de colores | Blanco caliente, negro caliente, pseudocolor |
| Zoom digital | 1x ~ 8x |
| Sincronizar la hora correcta | Sí |
| EO / IR Camera Object Tracking Parameters | |
| Tasa de actualización del píxel de desviación | 30 Hz |
| Retardo de salida del píxel de desviación | <30ms |
| Contraste mínimo del objeto | 5% |
| SNR | 4 |
| Tamaño mínimo del objeto | 16*16 píxeles |
| Tamaño máximo del objeto | 256*256 píxeles |
| Velocidad de seguimiento | 48 pixel/frame |
| Tiempo de memoria del objeto | 100 cuadros |
| AI Tracking Linkage | Sí |
| Laser Rangefinder Parameters | |
| Alcance efectivo | For Vehicle≥3000m For human≥2000m |
| Minimum range of measurement | 15m |
| Range accuracy | ±1m |
| Range frequency | 1~10Hz |
| Wave length | 1535±5nm |
| Divergence angle | ~0.6mrad |
| Coordinate resolve | Logitude and latitude of target |
| Measurement | Measure distance from center of object to laser rangefinder sensor |
| Camera AI Recogn | ition Performance Parameters |
| Target type | Vehicle, Human |
| Cantidad de detección simultánea | ≥10 targets |
| Contrast ratio | ≥5% |
| Minimum size of target | 5 X 5 pixel |
| Vehicle detection ratio | ≥85% |
| False alarm ratio | ≤10% |
| Información sobre el embalaje | |
| N.O. | 1136g (Viewport Version) |
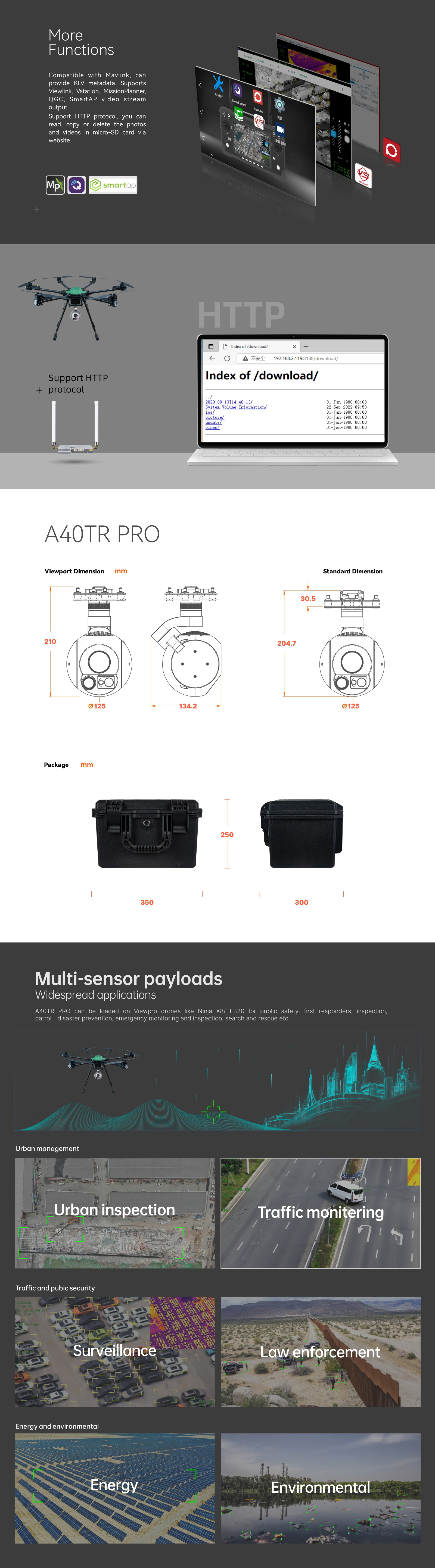
| Producto meas. | 134.2*125*210.4mm(Viewport Version) |
| Peso | 1 kg |
|---|
Sé el primero en valorar “A40TR Pro 40x EO + IR+ LRF AI Object Tracking Gimbal Camera”
Debes acceder para publicar una valoración.
Productos relacionados






Cardanes y carga útil
€0.00


Cardanes y carga útil
VO-120S Cámara oblicua 3D para cartografía y topografía con función de geoetiquetado
€6,199.00


Cardanes y carga útil
Q20KTIR Pro Cámara giroestabilizada de alta resolución IR EO de doble sensor y 3 ejes
€0.00


Cardanes y carga útil
Q30TM Cámara Gimbal de 30 aumentos con resolución de coordenadas GPS de objetos y LRF
€0.00


Cardanes y carga útil
VOM-42 Cámara cartográfica de 42 MP para reconocimiento aéreo de grandes áreas
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cardanes y carga útil
U2 Ultra Ligero Micro Prime LensDual EO Sensores FHD 1080P Seguimiento de Objetos Gimbal Cámara
€0.00
Valoraciones
No hay valoraciones aún.