

















| Parámetros de hardware | |
| Tensión de trabajo | 16V |
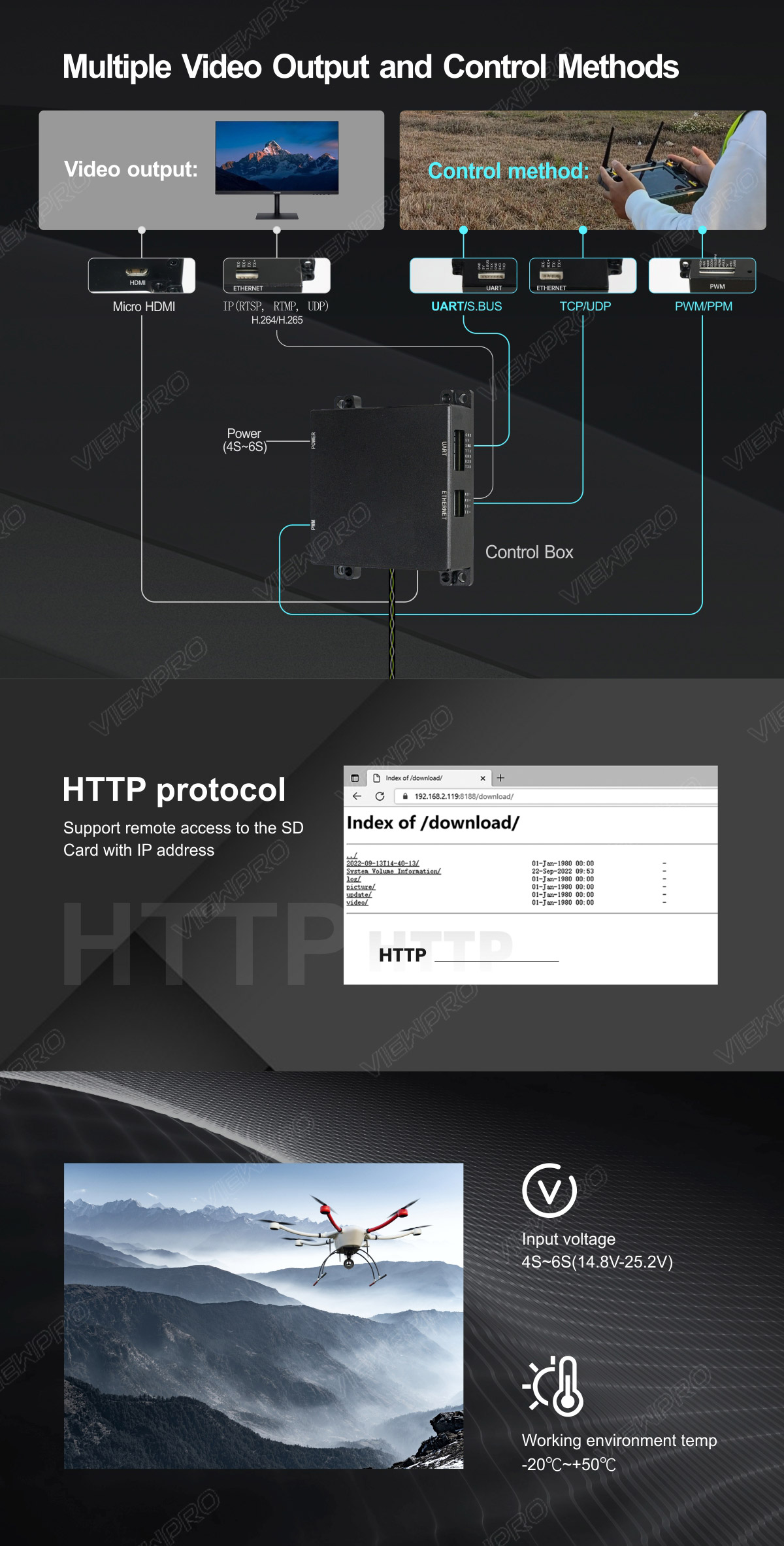
| Tensión de entrada | 4S ~ 6S (14.8V~25.2V) |
| Tensión de salida | 5V (conectar con PWM) |
| Corriente dinámica | 500~1000mA @ 16V |
| Power consumption | Average 8W, Max 16W |
| Entorno de trabajo temp. | -20℃ ~ +50℃ |
| Salida | Micro HDMI(1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Almacenamiento local | TF card (Up to 256G, class 10, FAT32 format) |
| Picture storage format in TF card | JPG(1920*1080) |
| Video storage format in TF card | MP4(1080P 30fps) |
| Método de control | PWM / TTL / S.BUS / TCP / UDP |
| Especificaciones del cardán | |
| Gama mecánica | Pitch/Tilt: -110°(Up)~130°(Down), Roll: ±40°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Alcance controlable | Pitch/Tilt: -45°~125°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| Ángulo de vibración | Pitch/Roll/Yaw: ±0.02° |
| Una tecla para centrar | √ |
| IR Thermal Imager 1 Spec | |
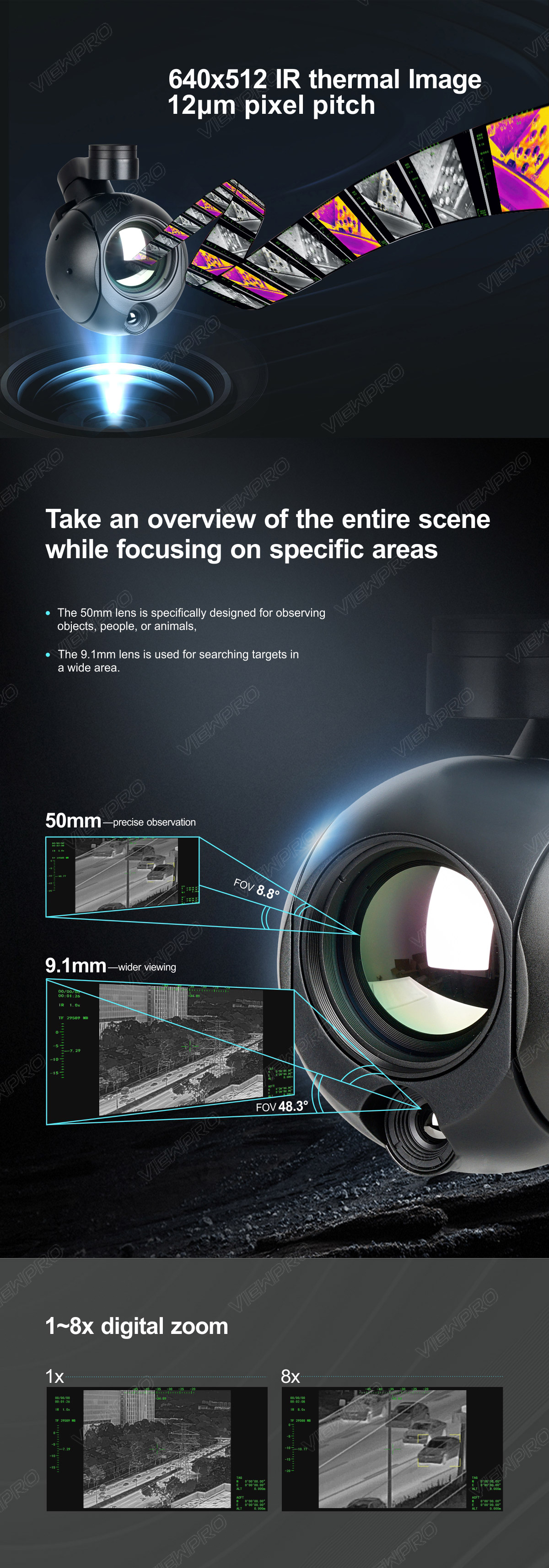
| Longitud de enfoque | 50mm |
| Aperture | F1.0 |
| FOV horizontal | 8.7° |
| FOV vertical | 7.0° |
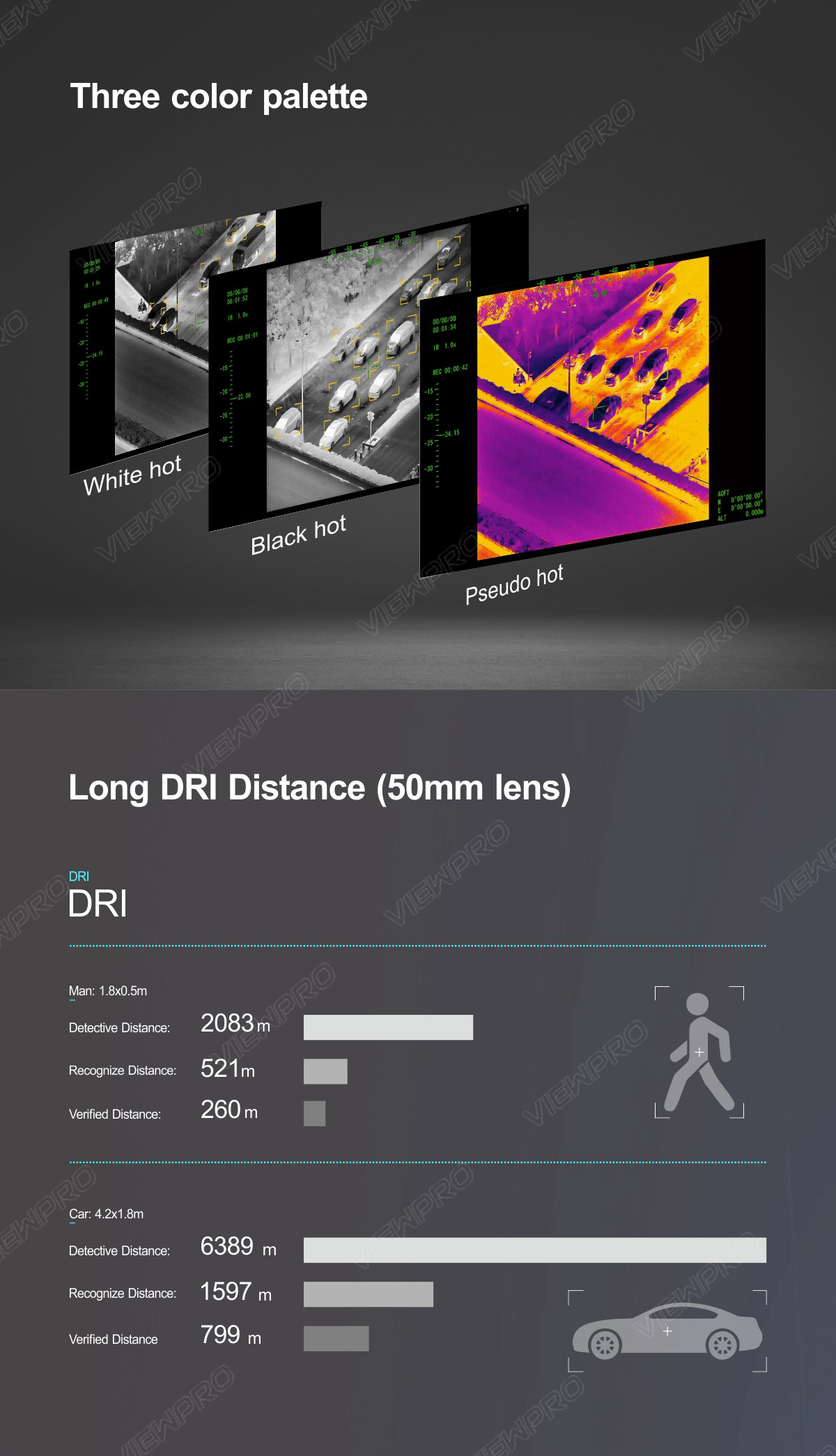
| Distancia de detección (Hombre: 1,8×0,5 m) | 2083 meters |
| Reconocer distancia (Hombre: 1,8×0,5 m) | 521 meters |
| Distancia verificada (Hombre: 1,8×0,5 m) | 260 meters |
| Distancia de detección (coche: 4,2×1,8 m) | 6389 meters |
| Reconocer la distancia (Coche: 4,2×1,8 m) | 1597 meters |
| Distancia verificada (coche: 4,2×1,8 m) | 799 meters |
| Modo de trabajo | Cámara termográfica VOx de onda larga no refrigerada (8μm~14μm) |
| Píxel detector | 640*512 |
| Paso de píxeles | 12μm |
| Método de enfoque | Objetivo de focal fija atérmico |
| NETD | ≤50mK@F1.0 @25℃ |
| Paleta de colores | White hot, black hot, pseudo color |
| Zoom digital | 1x ~ 8x |
| IR Thermal Imager 2 Spec | |
| Longitud de enfoque | 9.1mm |
| Aperture | F1.0 |
| FOV horizontal | 48.3° |
| FOV vertical | 38.6° |
| Distancia de detección (Hombre: 1,8×0,5 m) | 379 meters |
| Reconocer distancia (Hombre: 1,8×0,5 m) | 95 meters |
| Distancia verificada (Hombre: 1,8×0,5 m) | 47 meters |
| Distancia de detección (coche: 4,2×1,8 m) | 1163 meters |
| Reconocer la distancia (Coche: 4,2×1,8 m) | 291 meters |
| Distancia verificada (coche: 4,2×1,8 m) | 145 meters |
| Modo de trabajo | Cámara termográfica VOx de onda larga no refrigerada (8μm~14μm) |
| Píxel detector | 640*512 |
| Pixel size | 12μm |
| Método de enfoque | Objetivo de focal fija atérmico |
| NETD | ≤40mK@F1.0 @25℃ |
| Paleta de colores | White hot, black hot, pseudo color |
| Seguimiento de objetos con cámara IR | |
| Tasa de actualización del píxel de desviación | 30 Hz |
| Retardo de salida del píxel de desviación | <30ms |
| Contraste mínimo del objeto | 5% |
| SNR | 4 |
| Tamaño mínimo del objeto | 16*16 píxeles |
| Tamaño máximo del objeto | 256*256 píxeles |
| Velocidad de seguimiento | ±48 píxeles/fotograma |
| Tiempo de memoria del objeto | 100 cuadros |
| IR Camera AI Performance | |
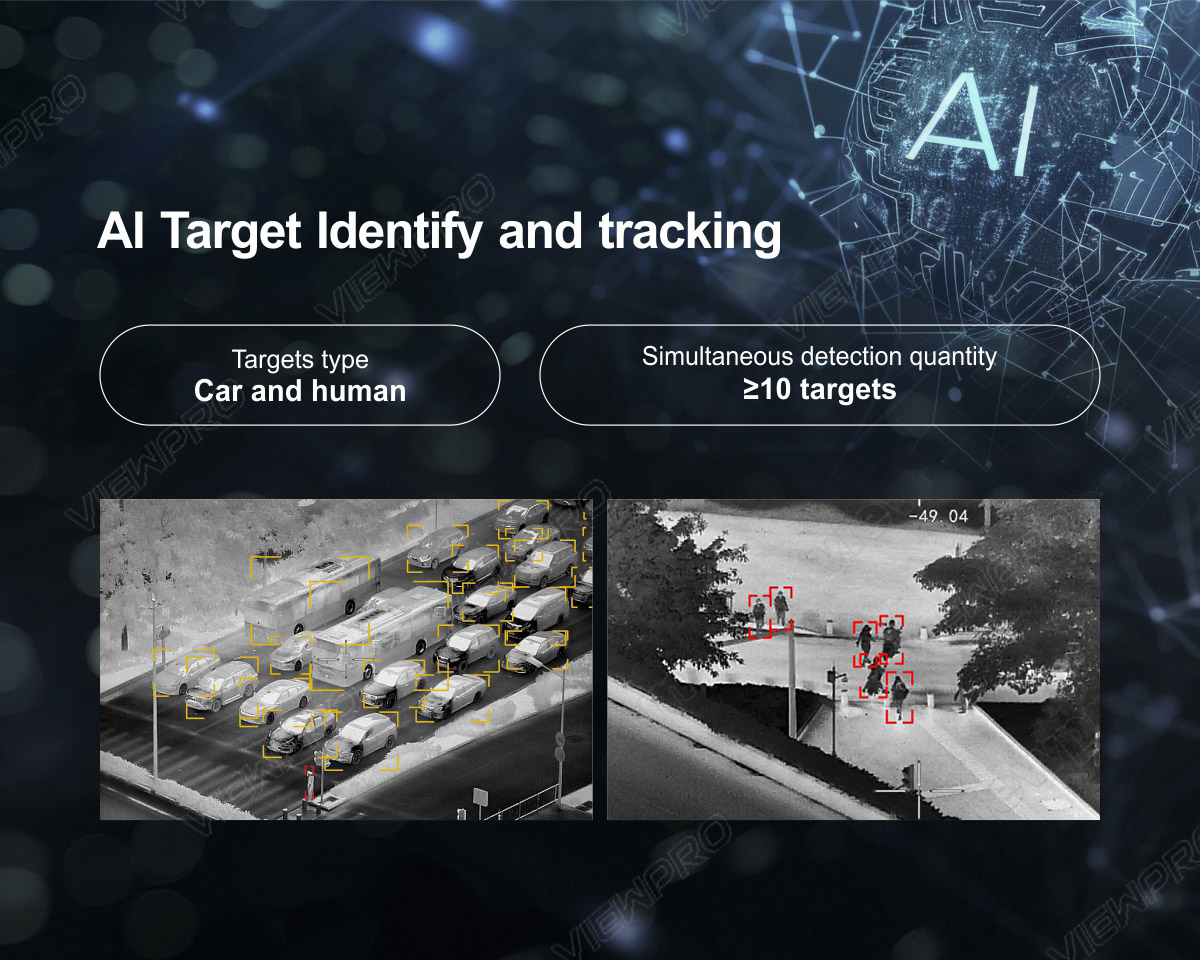
| Tipo de objetivos | Coche y humano |
| Cantidad de detección simultánea | ≥ 10 objetivos |
| Relación de contraste mínima | 5% |
| Tamaño mínimo del objetivo | 5×5 píxeles |
| Índice de detección de coches | ≥85% |
| Tasa de falsas alarmas | ≤10% |
| Features | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, date and time |
| Geotagging | Display time and GPS coordinate in picture exif |
| Lectura de cartas en línea | HTTP read pictures or videos |
| KLV (UDP) | Card recording or Viewlink video playback |
| ArduPilot / PX4 | Support(Mavlink protocol ) Optional: Support Ardupilot Follow me feature |
| Video stitching | IR1+IR2 / IR2+IR1 / IR1 / IR2 |
| Dual video stream output (optional) | Support( IR1 and IR2 two stream output, notes: unable to record once the dulal video stream output activated) |
| Información sobre el embalaje | |
| N.O. | 720±10g(Viewport version with Viewport) |
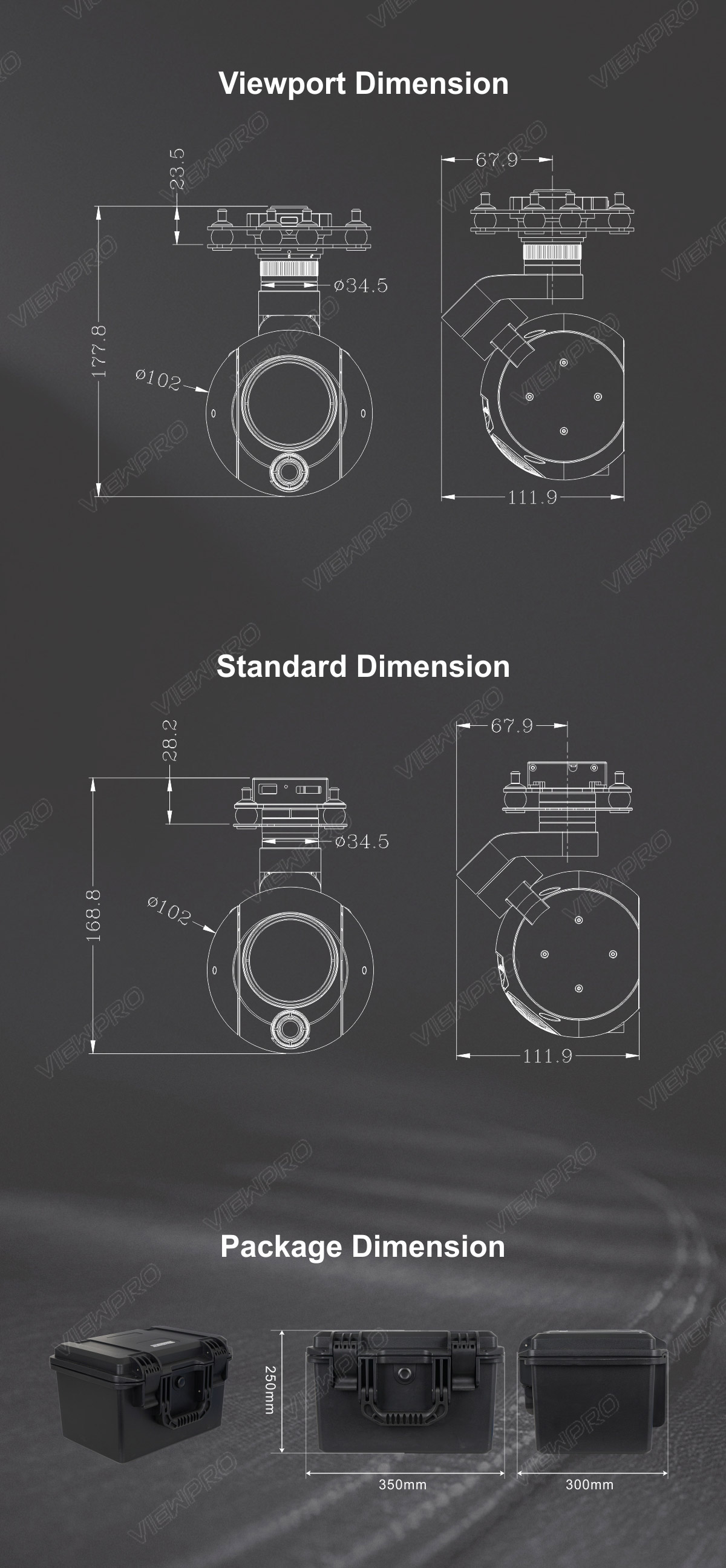
| Producto meas. | 114.5*105*171.8mm / 114.5*105*180.8mm (Viewport version with Viewport) |
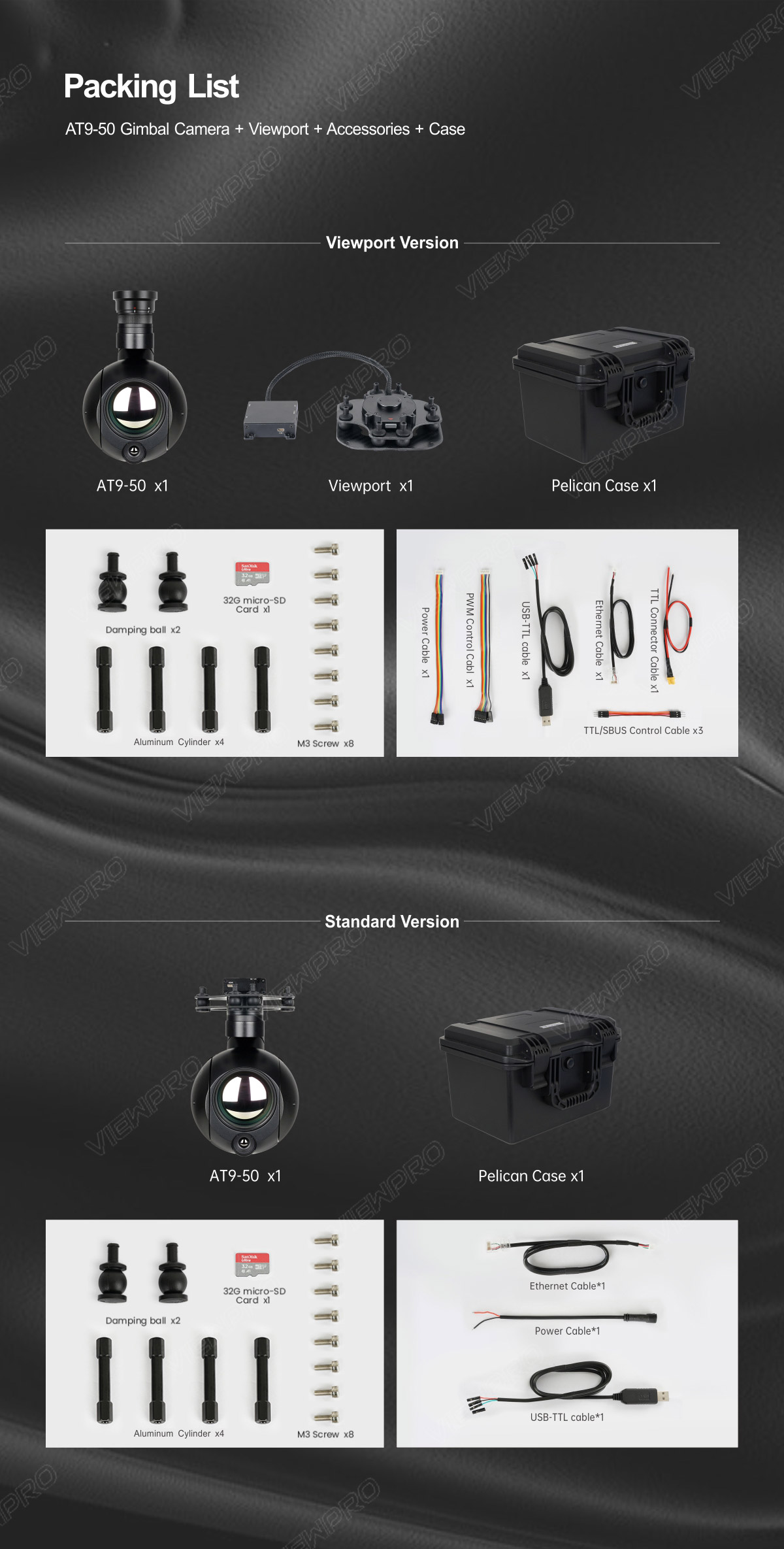
| Accesorios | 1pc gimbal camera device, screws, aluminum cylinders, damping balls, damping boards, 1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| G.W. | 1820g |
| Paquete meas. | 300*250*200mm |
| Peso | 1 kg |
|---|
Sé el primero en valorar “AT9-50 Dual IR 5x Thermal Zoom FOV Flexibility Gimbal Camera”
Debes acceder para publicar una valoración.
Productos relacionados


Cardanes y carga útil
€12,999.00


Cardanes y carga útil
€12,799.00


Cardanes y carga útil
Hawkeye serie U818 Micro Prime Lens Cámara de seguimiento de doble sensor para la vigilancia
€0.00




Cardanes y carga útil
€0.00


Cardanes y carga útil
U2 Ultra Light Weight Micro Prime LensDual EO Sensors FHD 1080P Object Tracking Gimbal Camera
€0.00


Cardanes y carga útil
€21,449.00


Cardanes y carga útil
U30T optimizado cardán de 2 ejes para cámara de avión VTOL y carga útil de UAV multirrotor
€4,499.00
Valoraciones
No hay valoraciones aún.