













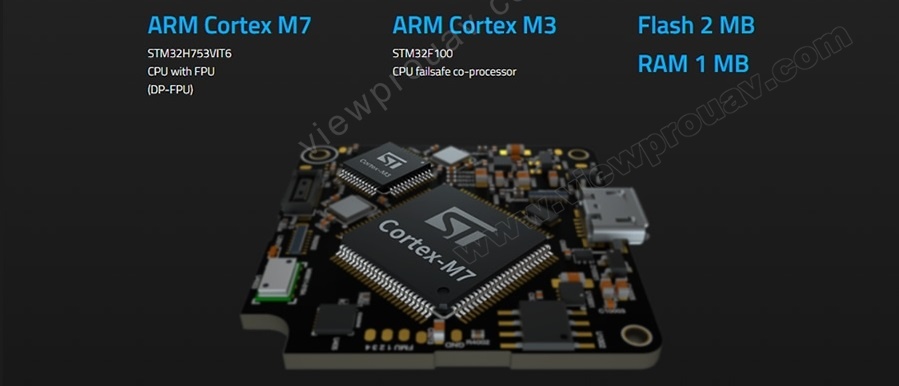
Equipped with High Performance H7 Processor
H7 has double-precision (DP) FPU, 1MB RAM, and 40OMHz CPU processor provides high performance, extremely fast operation, and stable solution for flight.
Situational Awareness by Integrated ADS-B
A 1090MHz customized ADS-B receiver from uAvionix has been integrated into the new ADS-B carrier board.This provides new function without size increment.UAVs equipped with the new carrier board can receive attitude of commercial manned aircrafts within the range of ADS-B out. This effectively informs the UAS operator to enable them to assess the risks on their current operation.

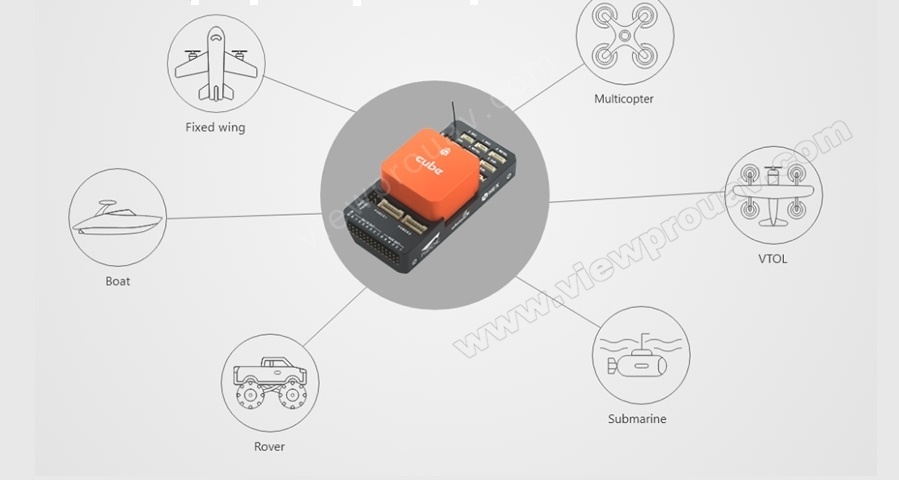
Support for multiple vehicle types
Including Helicopter, qnulticopter, fixed wing, VTOL, Rover, Boat, Submarine, etc
Triple redundant IMU system
Packed with upgraded sensors providing more reliable and safe system.

Easy switching of PWM output signal voltage
PWM output supports switching between 3.3V and 5V signal levels. Voltage switching can be done by ground control station software. This improves compatibility with various external peripherals.

|
Hardware specification |
||
|
Main Processor |
STM32H753VIT6 |
|
|
Coprocessor |
STM32F1 |
|
|
Supported RC signals |
PPM/SBUS/DSM |
|
|
Power redundancy |
Triple redundancy |
|
|
Sensors |
Triple lMU System |
|
|
Sensors details
|
ICM20649(integrated accelerometer+gyroscope) |
|
|
ICM20602(integrated accelerometer+gyroscope) |
||
|
ICM20948(integrated accelerometer+gyro+magnetometer) |
||
|
MS5611x 2(Baro) |
||
|
Supported firmware |
Ardupilot and PX4 open source flight controller firmware |
|
|
Supported vehicle types
|
Fixed-wing planes |
|
|
Copters with 3-8 motors |
||
|
HelicoptersVTOL-planes |
||
|
Rovers/boats/submarines |
||
|
Especificación |
||
|
Peso |
73g |
|
|
Chassis Material |
CNC Aluminum Alloy(cube)+ABS Molding(Carrier Board) |
|
|
Talla
|
cube 38.4×38.4x22mm |
|
|
Carrier Board 94.5×44.3×17.3mm |
||
|
Temperatura de funcionamiento |
-10~+55°IMU with temperature control |
|
|
PWM 1/Os |
14 |
|
|
Mavlink serial interface |
2 |
|
|
Number of GPS supported |
2 |
|
|
Debug interface |
1 |
|
|
12C interface |
1 |
|
|
CAN interface |
2 |
|
|
Aquí2 frente a Aquí3 |
||
|
Características |
hara2 |
hara3 |
|
GNSS |
Sí |
Sí |
|
Brújula |
Sí |
Sí |
|
Protocolo |
12C,CAN |
CAN |
|
Sistema operativo en tiempo real |
Sí |
Sí |
|
Actualización del firmware |
Sí |
Sí |
|
RTK |
No |
Sí |
|
A prueba de polvo, salpicaduras de agua |
No |
Sí |
|
Especificación |
||
|
Tipo de receptor |
u-blox M8 high precision GNSS modules(M8P) |
|
|
Constelación de satélites |
GPS L1C/A, GLONASSL10F, BeiDou B1l |
|
|
Positioning accuracy |
3D FIX: 2.5m / RTK:0.025m |
|
|
Procesador |
STM32F302 |
|
|
IMU snesor |
ICM20948 |
|
|
Tasa de actualización de la navegación |
Max:8Hz |
|
|
Protocolo de comunicación |
CAN |
|
|
0perating Temperature |
-40°C a 85°C |
|
|
Dimensión |
76mm x 76mm x 16.6mm |
|
|
Peso |
48.8g |
|
| Peso | 1 kg |
|---|
Sé el primero en valorar “HEX Cube Orange Autopilot Open Source Drone Flight Control”
Debes acceder para publicar una valoración.
Productos relacionados




Accesorios UAV
SKYDROID-H16 RC Radio de datos Enlace de vídeo Tres en uno Estación de tierra portátil SYS



Controlador de vuelo & GPS & RTK
VPS-381 PPK Receptor GNSS aerotransportado Topografía y cartografía aérea RTK PPK 2en1




Controlador de vuelo & GPS & RTK
TS-2 Singal Enhancement Antena Trípode Estabilizador Kits para Drone GCS




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Valoraciones
No hay valoraciones aún.