













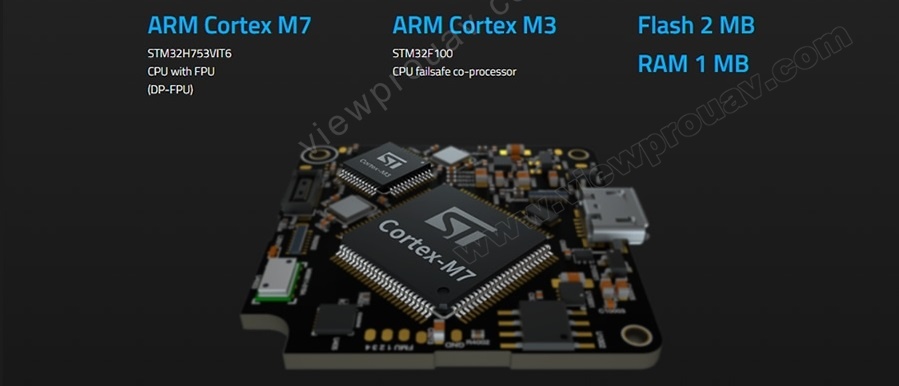
Équipé d'un processeur H7 haute performance
Le H7 est doté d'un FPU à double précision (DP), d'une mémoire vive de 1 Mo et d'un processeur de 40 MHz. Il offre des performances élevées, un fonctionnement extrêmement rapide et une solution stable pour le vol.
Conscience de la situation grâce à l'ADS-B intégré
Un récepteur ADS-B personnalisé de 1090 MHz de uAvionix a été intégré dans la nouvelle carte porteuse ADS-B, ce qui permet d'obtenir de nouvelles fonctions sans augmentation de la taille. Les drones équipés de la nouvelle carte peuvent recevoir l'attitude des aéronefs commerciaux pilotés dans le rayon d'action de l'ADS-B out.

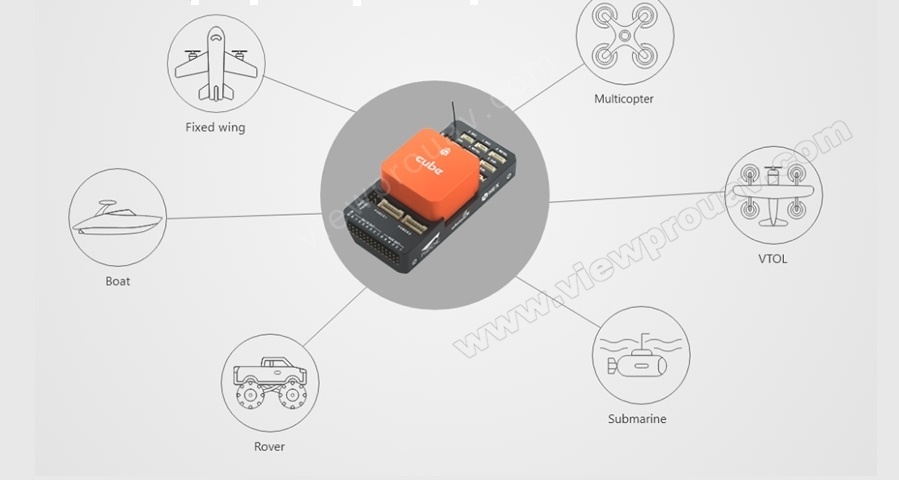
Prise en charge de plusieurs types de véhicules
Y compris les hélicoptères, les hélicoptères à voilure fixe, les avions à voilure tournante, les véhicules tout-terrain, les bateaux, les sous-marins, etc.
Système IMU à triple redondance
Doté de capteurs améliorés pour un système plus fiable et plus sûr.

Commutation aisée de la tension du signal de sortie PWM
La sortie PWM permet de commuter entre les niveaux de signal 3,3V et 5V. La commutation de tension peut être effectuée par le logiciel de la station de contrôle au sol. Cela améliore la compatibilité avec divers périphériques externes.

|
Spécifications du matériel |
||
|
Processeur principal |
STM32H753VIT6 |
|
|
Coprocesseur |
STM32F1 |
|
|
Signaux RC pris en charge |
PPM/SBUS/DSM |
|
|
Redondance de l'alimentation |
Triple redondance |
|
|
Capteurs |
Triple système d'UMI |
|
|
Détails des capteurs
|
ICM20649 (accéléromètre+gyroscope intégrés) |
|
|
ICM20602 (accéléromètre+gyroscope intégrés) |
||
|
ICM20948 (accéléromètre+gyro+magnétomètre intégrés) |
||
|
MS5611x 2(Baro) |
||
|
Micrologiciel pris en charge |
Ardupilot et PX4 : firmware de contrôleur de vol open source |
|
|
Types de véhicules pris en charge
|
Avions à voilure fixe |
|
|
Coptères avec 3-8 moteurs |
||
|
HélicoptèresVTOL-avions |
||
|
Rovers/bateaux/sous-marins |
||
|
Spécifications |
||
|
Poids |
73g |
|
|
Matériau du châssis |
Alliage d'aluminium CNC (cube) + moulage d'ABS (panneau de support) |
|
|
Taille
|
cube 38.4×38.4x22mm |
|
|
Carte de support 94,5×44,3×17,3mm |
||
|
Température de fonctionnement |
-10~+55°IMU avec contrôle de la température |
|
|
PWM 1/Os |
14 |
|
|
Interface série Mavlink |
2 |
|
|
Nombre de GPS pris en charge |
2 |
|
|
Interface de débogage |
1 |
|
|
Interface 12C |
1 |
|
|
Interface CAN |
2 |
|
|
Here2 vs Here3 |
||
|
Caractéristiques |
hara2 |
hara3 |
|
GNSS |
Oui |
Oui |
|
Boussole |
Oui |
Oui |
|
Protocole |
12C,CAN |
CAN |
|
Système d'exploitation en temps réel |
Oui |
Oui |
|
Mise à jour du micrologiciel |
Oui |
Oui |
|
RTK |
Non |
Oui |
|
Étanchéité à la poussière,étanchéité aux éclaboussures |
Non |
Oui |
|
Spécifications |
||
|
Type de récepteur |
Modules GNSS de haute précision u-blox M8 (M8P) |
|
|
Constellation de satellites |
GPS L1C/A, GLONASSL10F, BeiDou B1l |
|
|
Précision du positionnement |
3D FIX : 2.5m / RTK:0.025m |
|
|
Processeur |
STM32F302 |
|
|
Snesor de l'IMU |
ICM20948 |
|
|
Taux de mise à jour de la navigation |
Max:8Hz |
|
|
Protocole de communication |
CAN |
|
|
0Température de fonctionnement |
-40°C à 85°C |
|
|
Dimension |
76 mm x 76 mm x 16,6 mm |
|
|
Poids |
48.8g |
|
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “HEX Cube Orange Autopilot Open Source Drone Flight Control”
Vous devez être connecté pour publier un avis.
Produits similaires






Contrôleur de vol, GPS et RTK
Pilote automatique de haut niveau / Contrôle de vol V7 Pro pour UAV USV UGV









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Avis
Il n’y a pas encore d’avis.