





Professional 3-axis High-precise FOC Program
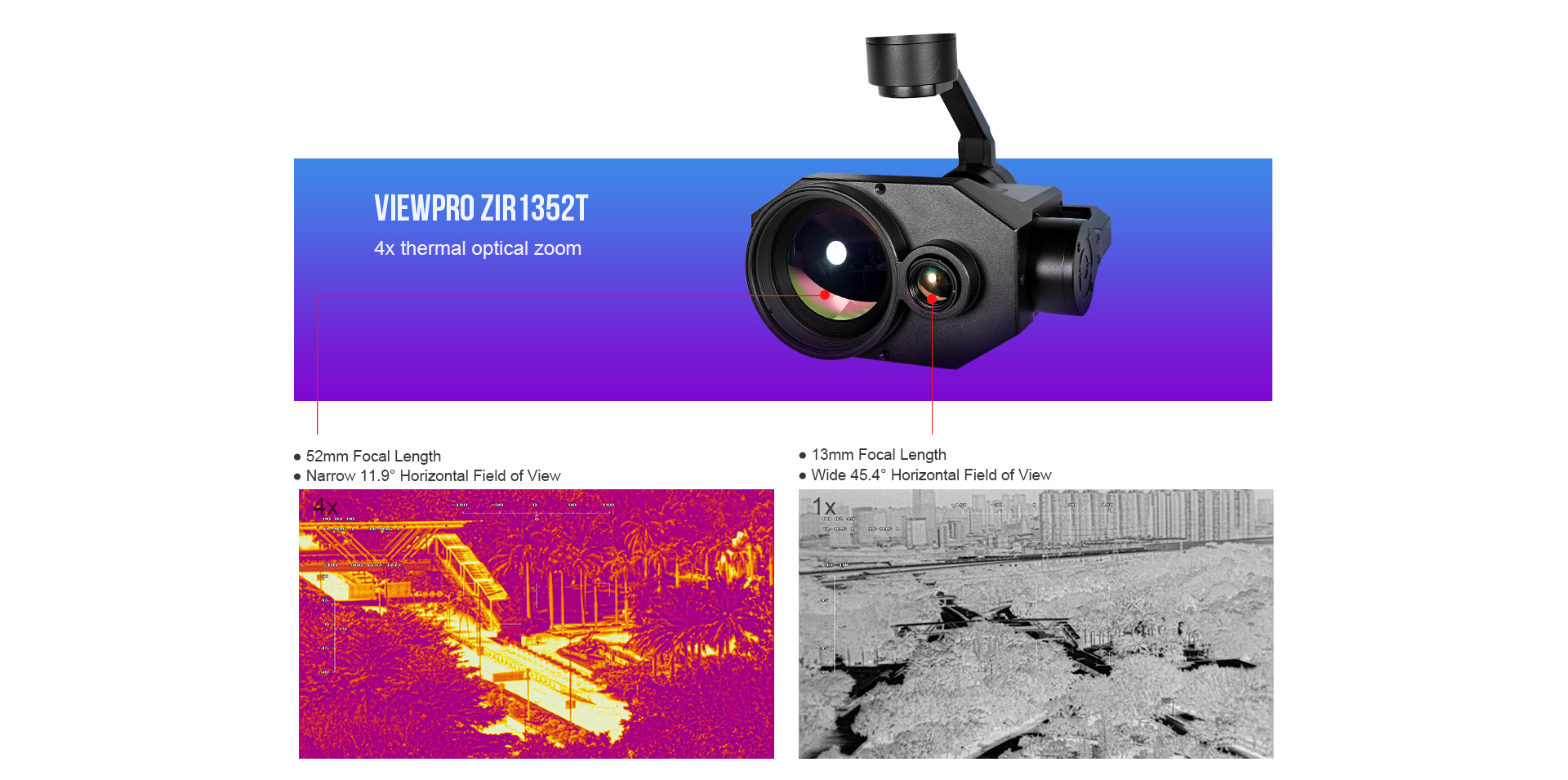
The ZIR1352T features thermal imager with 13mm & 52mm lens, supports 640*480 detector pixels, 4x optical zoom and 1x ~ 4x digital zoom. The gimbal can be controlled in three directions: YAW, ROLL and PITCH , we use FOC solution can greatly compensate the vibration of UAV.
High Resolution Dual Thermal Zooming Camera
Integrated French ULIS high-precision uncooled long wave (8μm ~14μm) thermal image sensor. With 4x optical zoom capabilities that IR sensor sitches from 13mm to 52mm, provides a wide 45.4° field of view for maximum situational awareness and a narrow 11.9° field of view to get the most thermal pixels on your target. The ZIR1352T allows drone pilots from the public safety and indstrial inspection sectors to gain field of FOV flexibility for improved image detailsand magnification to assess situations and and make critical decisions.
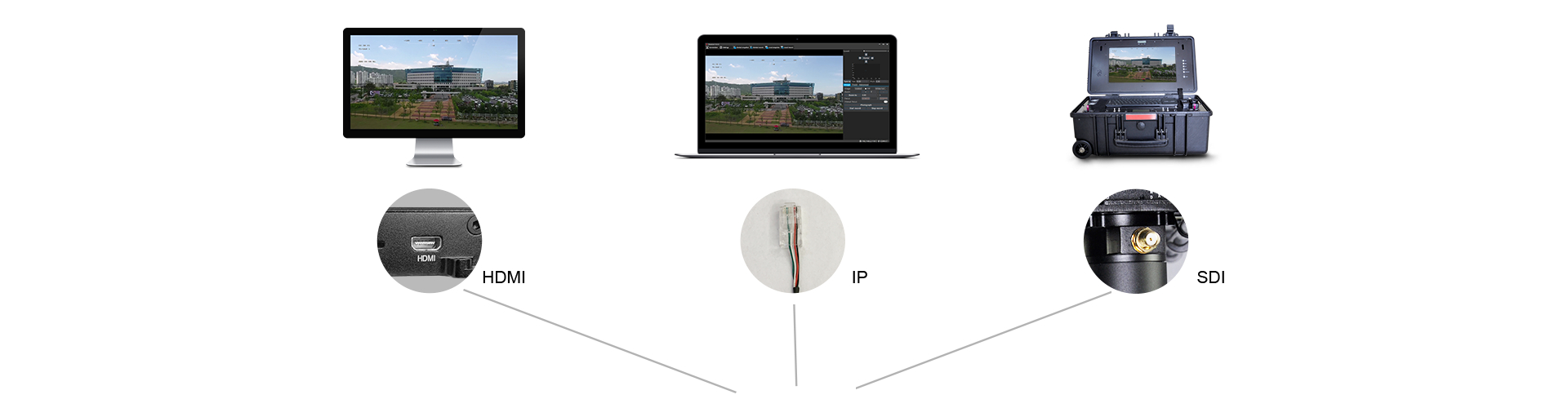
Métodos de salida múltiple Opcional
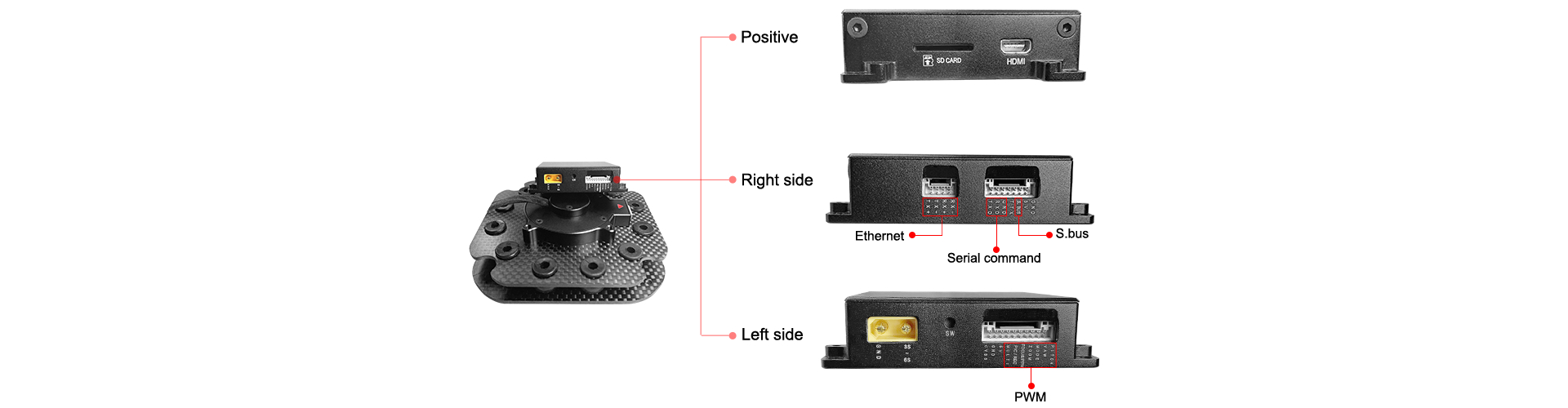
ZIR1352T supports both HDMI output, Ethernet/IP output and SDI output. HDMI and output are 1080p, Ethernet output default as 720p and record is 1080p. IP output and SDI output versions will support 360 degree enless pan.

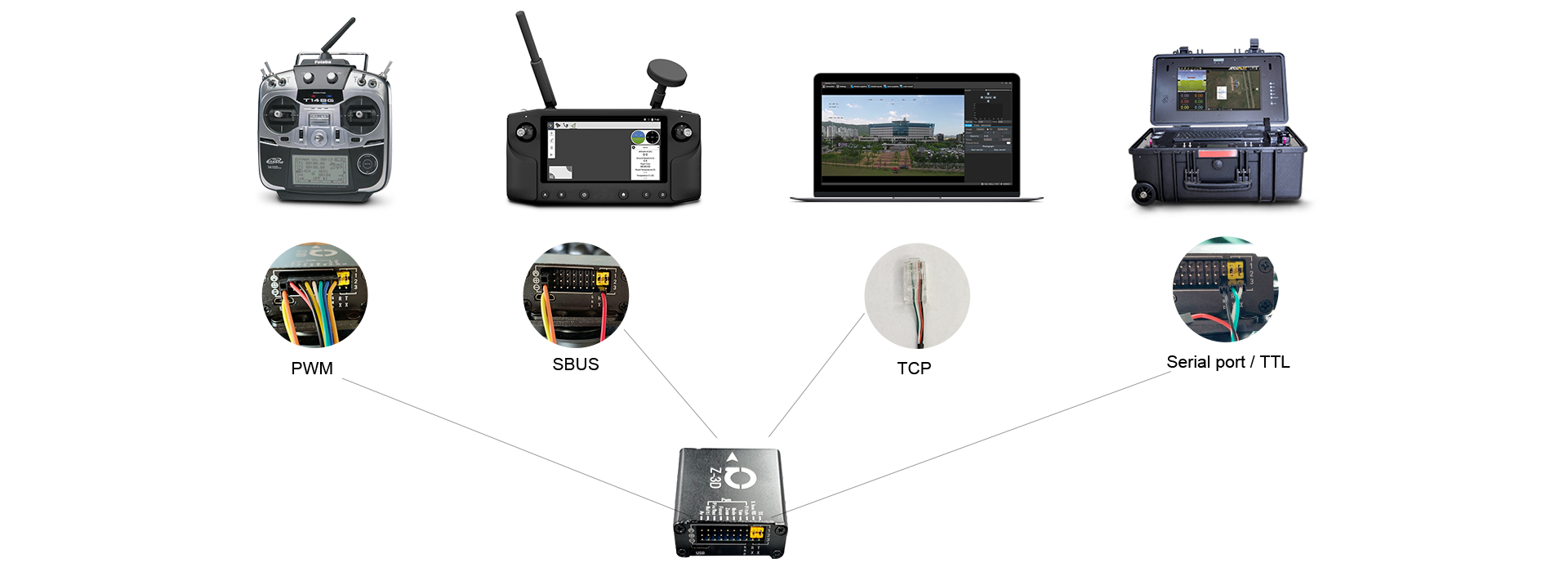
Métodos de control múltiple
Default PWM and Serial port TTL control, SBUS is optional, IP output version also support TCP control via ethernet cable. With Viewpro software Viewlink you can fulfill IP output, TTL control and TCP contorl.
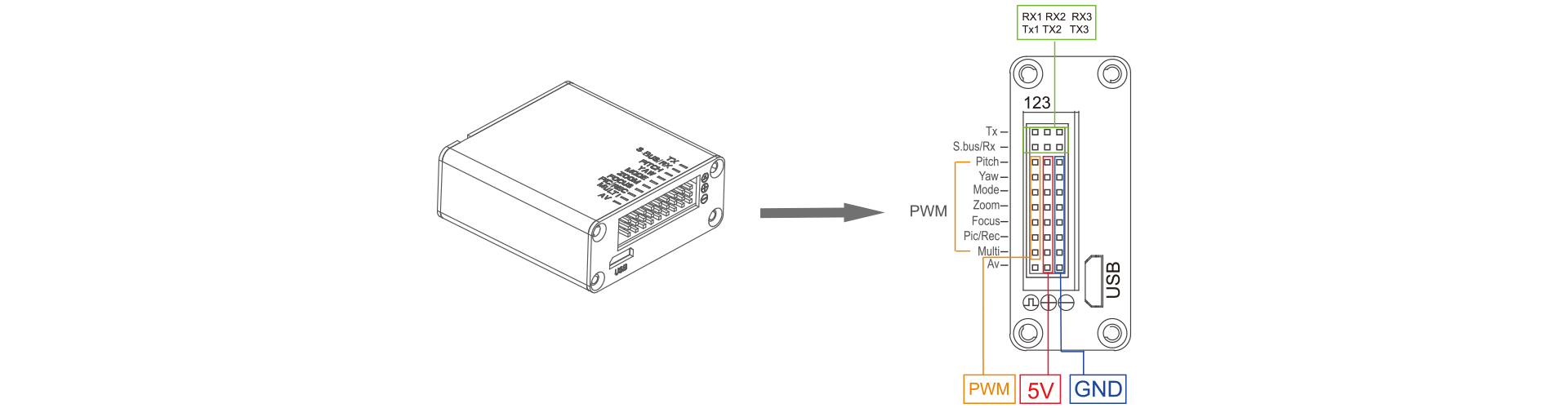
Interfaces de señal de la caja de control:
Compatible con Viewport
ZIR1352T is compatible with Viewpro quick release connector Viewport. Viewport is an option known as easy assembly, plug and play.
Para obtener más información sobre Viewport, consulte el siguiente vídeo de instrucciones:
Aplicación
Se utilizan principalmente en la aplicación de la ley, la lucha contra incendios, la inspección de torres de alta tensión y tuberías, la búsqueda y el rescate, etc. En caso de emergencia, es necesario disponer de una amplia gama de medios de vigilancia y búsqueda para trasladar rápidamente la situación, mejorar la eficacia de la respuesta y reducir el número de víctimas.
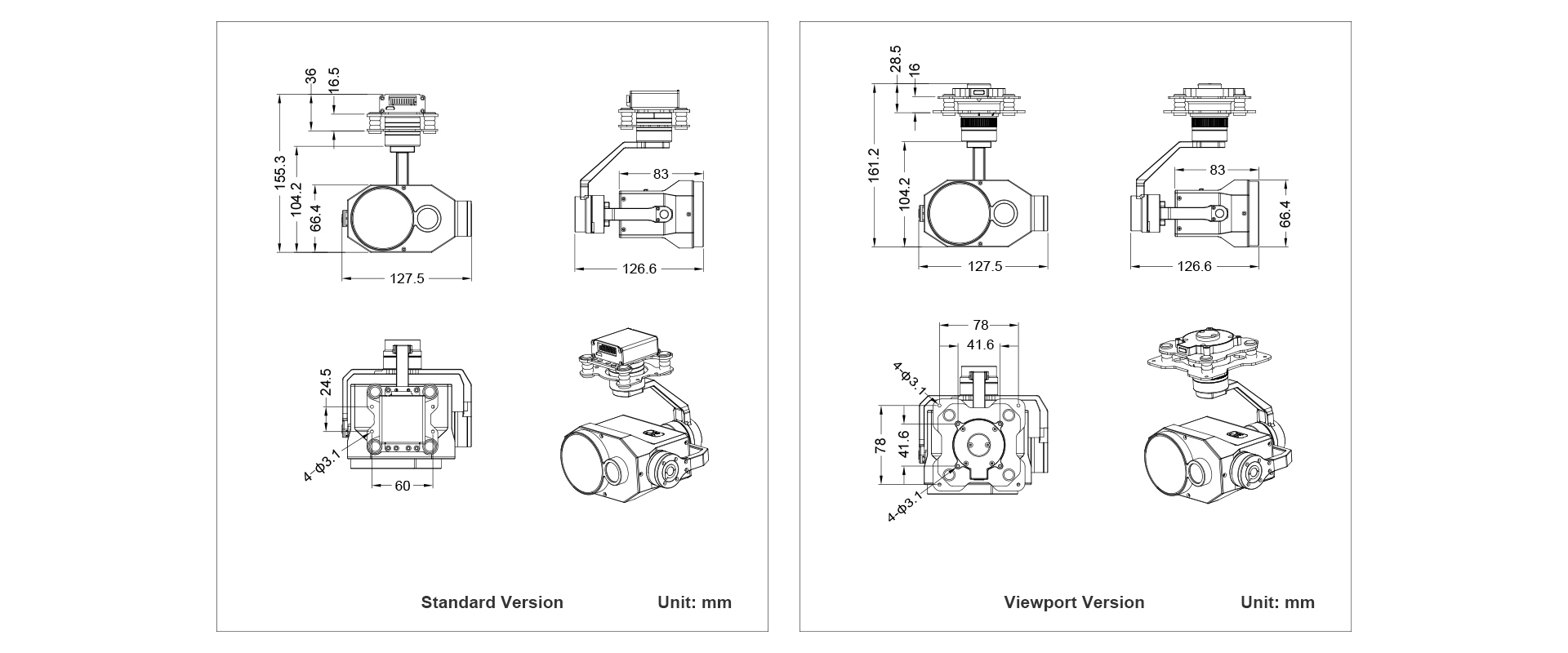
Dimensiones
| Parámetros de hardware | |
| Tensión de trabajo | 12V ~ 16V |
| Tensión de entrada | 3S ~ 4S |
| Corriente dinámica | 650mA~850mA @ 12V |
| Corriente en vacío | 540mA @ 12V |
| Entorno de trabajo temp. | -20℃ ~ +60℃ |
| Salida | micro HDMI(HD output 1080P 50fps) / IP (1080P/720P) |
| Almacenamiento local | Tarjeta SD (hasta 128 G, clase 10, formato FAT32 o ex FAT) |
| Método de control | PWM / TTL / S.BUS / TCP (IP output) |
| Especificaciones del cardán | |
| Gama mecánica | Pitch/Tilt: -70~120°, Roll: ±55°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Alcance controlable | Pitch/Tilt: -45°~90°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| Ángulo de vibración | Pitch/Roll: ±0,02°, Yaw:±0,02°. |
| Una tecla para centrar | √ |
| Especificaciones de la cámara termográfica | |
| Tamaño del objetivo | 52mm |
| FOV horizontal | 11.9° |
| FOV vertical | 9° |
| FOV diagonal | 14.9° |
| Distancia de detección (Hombre: 1,8×0,5 m) | 1529 meters |
| Reconocer distancia (Hombre: 1,8×0,5 m) | 382 meters |
| Distancia verificada (Hombre: 1,8×0,5 m) | 191 meters |
| Distancia de detección (coche: 4,2×1,8 m) | 4690 meters |
| Reconocer la distancia (Coche: 4,2×1,8 m) | 1173 meters |
| Distancia verificada (coche: 4,2×1,8 m) | 586 meters |
| Modo de trabajo | Cámara termográfica de onda larga no refrigerada (8μm~14μm) |
| Píxel detector | 640*480 |
| Tamaño de píxel | 17μm |
| Método de enfoque | Objetivo de focal fija atérmico |
| Corrección de la emisividad | 0.01~1 |
| NETD | ≤50mK (@25℃) |
| MRTD | ≤650mK (@frecuencia característica) |
| Mejora de la imagen | Ajuste automático del brillo y el contraste de la imagen |
| Paleta de colores | Blanco, rojo hierro, pseudocolor |
| Corrección automática no uniforme | Sí (sin obturador) |
| Zoom digital | 1x ~ 4x |
| Sincronizar la hora correcta | Sí |
| Tipo de termometría | Temperature bar (psudo color display) max temp, min temp, FOV center temp (Optional) |
| Aviso de temperatura | 0℃~120℃ (for thermometry verson only) |
| Especificaciones de la cámara termográfica | |
| Tamaño del objetivo | 13mm |
| FOV horizontal | 45.4° |
| FOV vertical | 34.8° |
| FOV diagonal | 55.2° |
| Distancia de detección (Hombre: 1,8×0,5 m) | 382 meters |
| Reconocer distancia (Hombre: 1,8×0,5 m) | 96 meters |
| Distancia verificada (Hombre: 1,8×0,5 m) | 48 meters |
| Distancia de detección (coche: 4,2×1,8 m) | 1173 meters |
| Reconocer la distancia (Coche: 4,2×1,8 m) | 293 meters |
| Distancia verificada (coche: 4,2×1,8 m) | 147 meters |
| Modo de trabajo | Cámara termográfica de onda larga no refrigerada (8μm~14μm) |
| Píxel detector | 640*480 |
| Tamaño de píxel | 17μm |
| Método de enfoque | Objetivo de focal fija atérmico |
| Corrección de la emisividad | 0.01~1 |
| NETD | ≤50mK (@25℃) |
| MRTD | ≤650mK (@frecuencia característica) |
| Mejora de la imagen | Ajuste automático del brillo y el contraste de la imagen |
| Paleta de colores | Blanco, rojo hierro, pseudocolor |
| Corrección automática no uniforme | Sí (sin obturador) |
| Zoom digital | 1x ~ 4x |
| Sincronizar la hora correcta | Sí |
| Thermal Imager Object Tracking | |
| Tasa de actualización del píxel de desviación | 50 Hz |
| Retardo de salida del píxel de desviación | 5 ms |
| Tamaño mínimo del objeto | 32*32 píxeles |
| Tamaño máximo del objeto | 128*128 píxeles |
| Velocidad de seguimiento | 32 pixel/frame |
| Tiempo de memoria del objeto | 100 fotogramas (4s) |
| Los valores de la raíz cuadrada media del ruido de impulsos en la posición del objeto | < 0,5 píxel |
| Información sobre el embalaje | |
| N.O. | 687g |
| Producto meas. | 127.5*127.4*156.5mm |
| Peso | 1 kg |
|---|
Sé el primero en valorar “ZIR1352T Professional 3-axis High-precise FOC Program with High Resolution Dual Thermal Zooming Camera”
Debes acceder para publicar una valoración.
Productos relacionados




Cardanes y carga útil
Q40TIR Cámara térmica de seguimiento 4K de alta resolución con zoom 40x y 50 mm y sensor IR doble


Cardanes y carga útil
U7DER /U7DE Micro Prime Lens Dual EO/IR Cámara Gimbal de Seguimiento de Objetos para Vigilancia


Cardanes y carga útil
U30T optimizado cardán de 2 ejes para cámara de avión VTOL y carga útil de UAV multirrotor






Cardanes y carga útil
Q20KTIR Cámara 4K Zoom óptico continuo 20x EO-IR Cámara de seguimiento de doble sensor de carga útil


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cardanes y carga útil
Valoraciones
No hay valoraciones aún.