

























.jpeg)

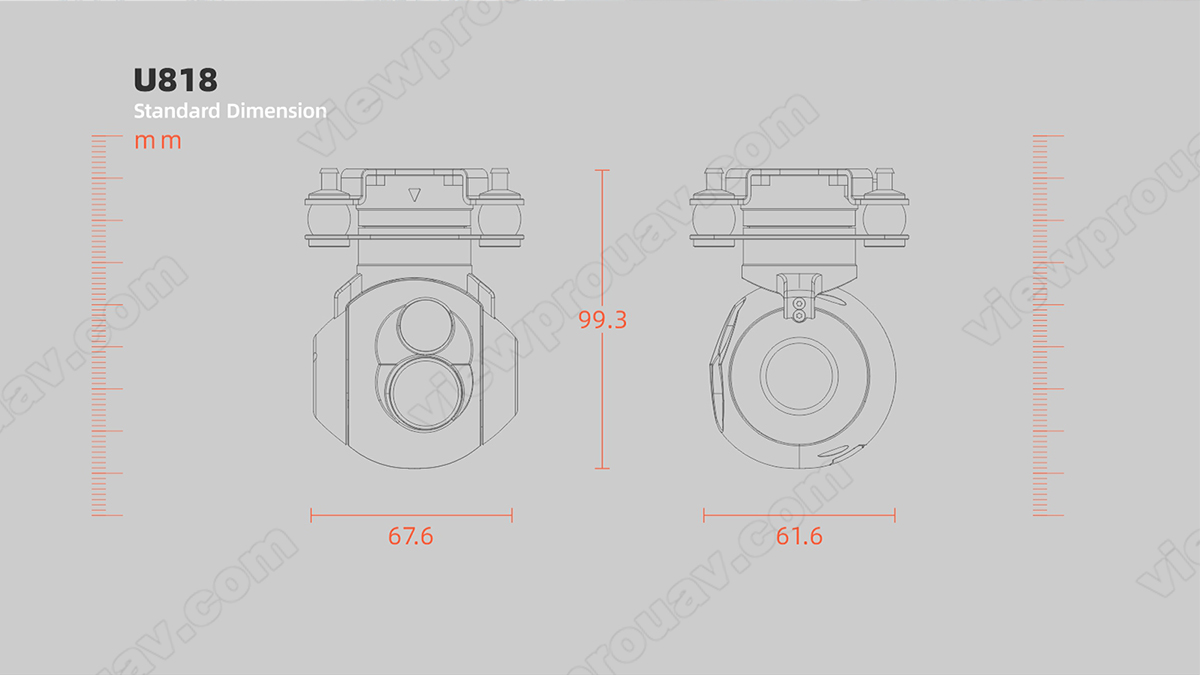
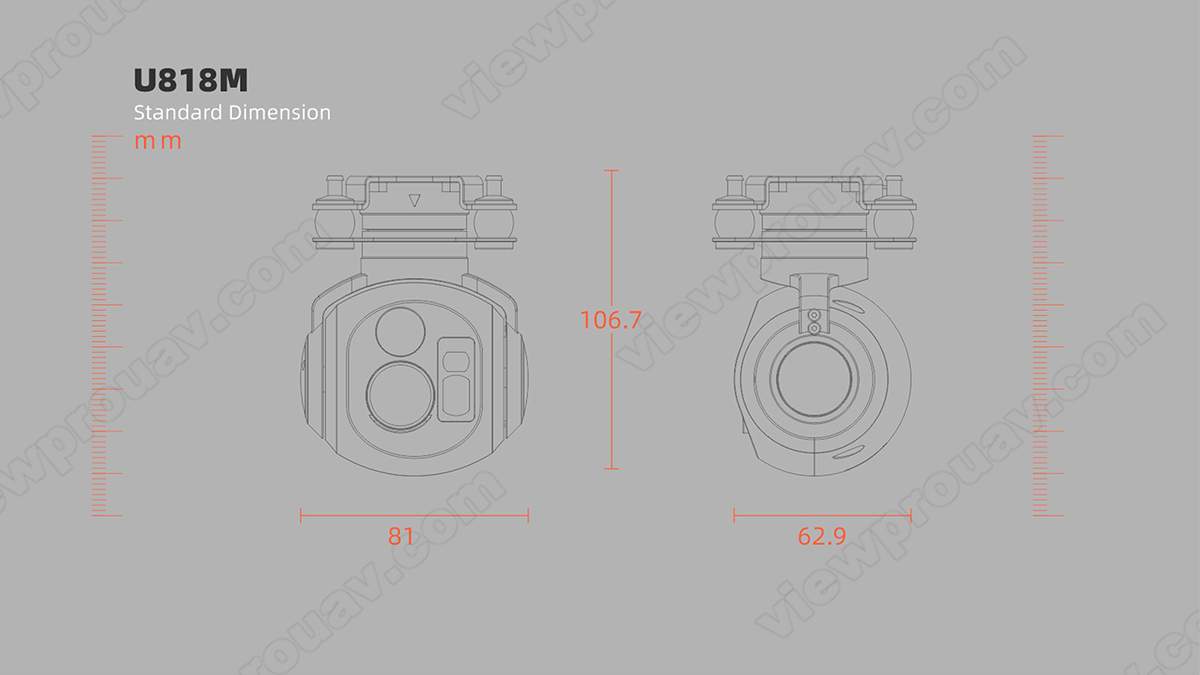


| Hardware Parameter U818 | |
| Tension de fonctionnement | 12V |
| Tension d'entrée | 3S ~ 6S(12V~25.2V) |
| Courant dynamique | 600~1200mA @ 12V |
| Consommation électrique | Average 7.2W, Max 14.5W |
| Environnement de travail temp. | -20℃ ~ +50℃ |
| Sortie | IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Stockage local | Carte SD (jusqu'à 512G, classe 10, format FAT32) |
| Format de stockage des images sur la carte TF | JPG (1920*1080) |
| Format de stockage vidéo dans la carte TF | MP4 (1080P 30fps) |
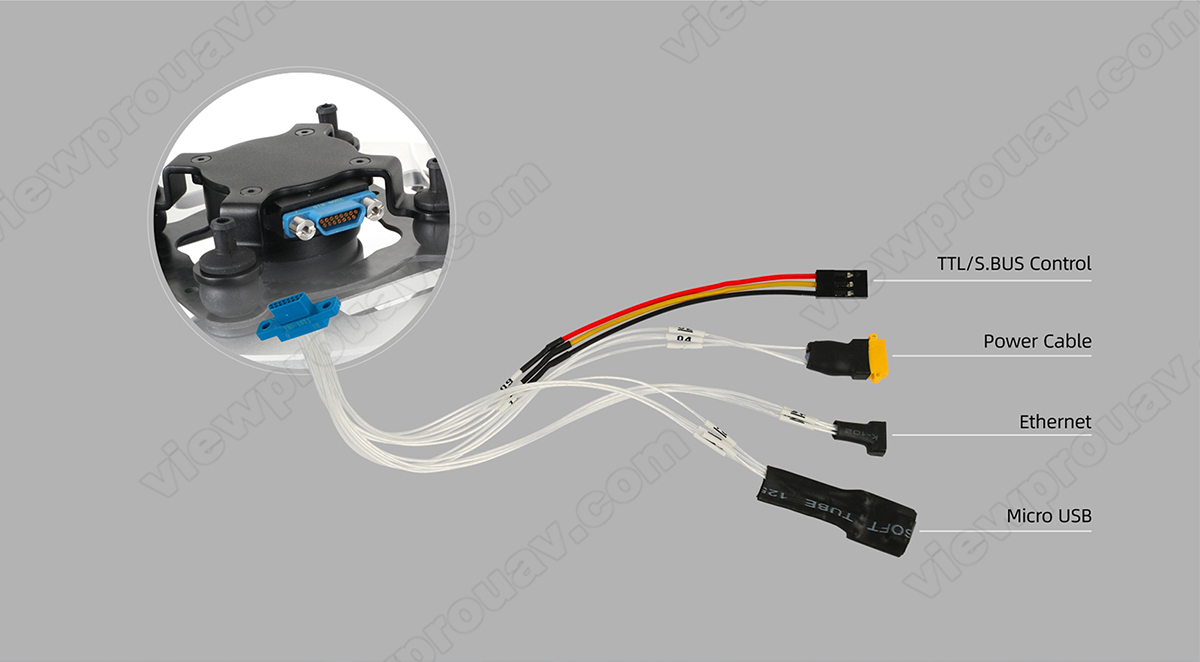
| Méthode de contrôle | TTL ou S.BUS (choisir l'un des deux, et TTL par défaut), et TCP/UDP |
| Spécifications du cardan | |
| Gamme mécanique | Pitch/Tilt: -55°~130°, Roll: ±70°, Yaw/Pan: ±150° / ±360°*N (IP output version) |
| Gamme contrôlable | Pitch/Tilt: -45°~125°, Yaw/Pan: ±145° / ±360°*N (IP output version) |
| Angle de vibration | Tangage, roulis et lacet : ±0,02°. |
| Une seule touche pour centrer | √ |
| Spécifications de la caméra EO | |
| Capteur d'image | CMOS Sensor |
| Résolution | 1920*1080 |
| Longueur de mise au point | 8mm |
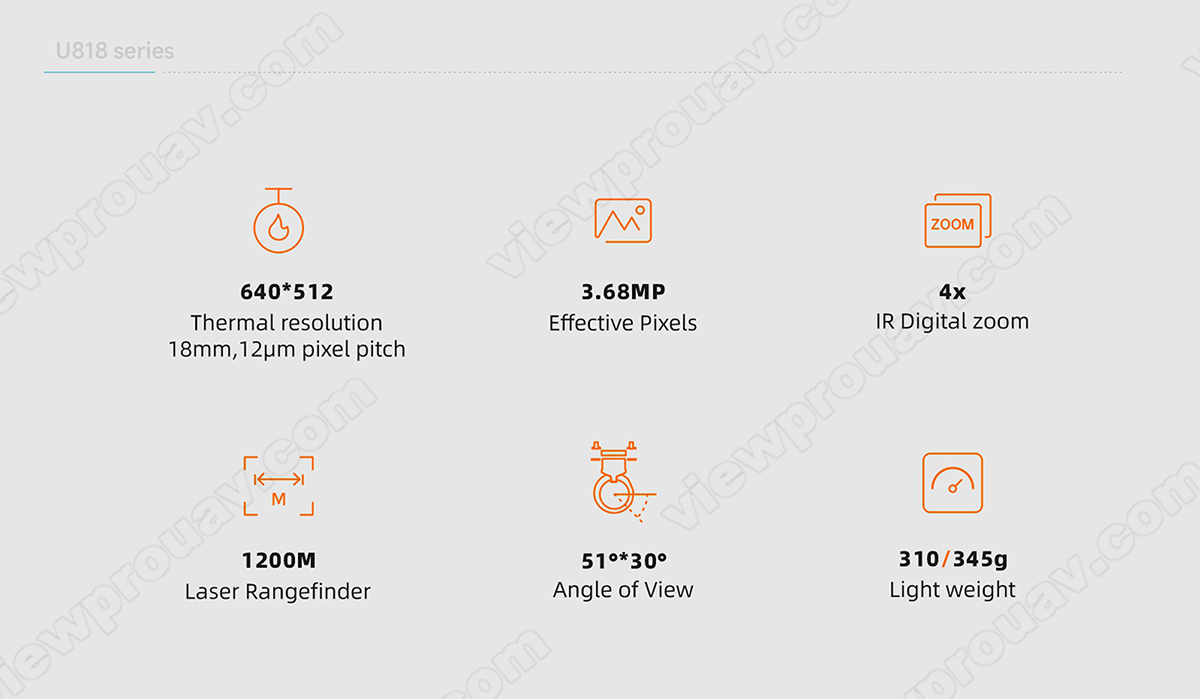
| Angle of View | 38.3°*22.1° |
| Distance de détection (voiture : 4,2×1,8m) | 1000m |
| Reconnaître la distance (Homme : 1.8×0.5m) | 400m |
| Zoom numérique | 1x ~ 8x |
| Désembuage | Oui |
| Spécifications de l'imageur thermique IR | |
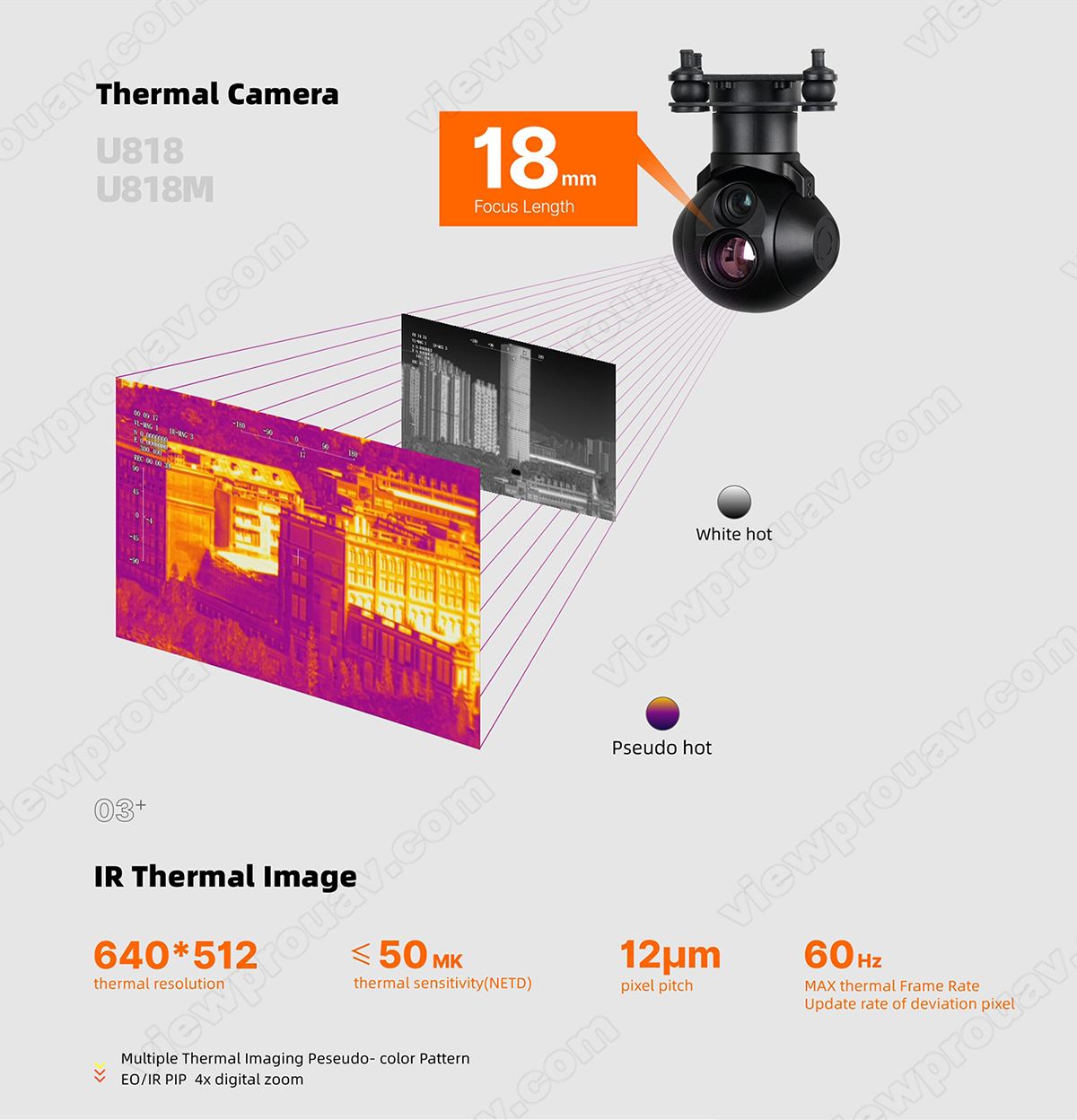
| Longueur de mise au point | 18mm |
| FOV horizontal | 24° |
| FOV vertical | 18.1° |
| Mode de travail | Imageur thermique VOx à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*512 |
| Taille du pixel | 12μm |
| Méthode de mise au point | Lentille primaire athermique |
| NETD | ≤[email protected] @25℃ |
| Palette de couleurs | White hot, black hote, pseudo color |
| Zoom numérique | 1x ~ 8x |
| Distance de détection (voiture : 4,2×1,8m) | 600m |
| Reconnaître la distance (Homme : 1.8×0.5m) | 250m |
| Suivi d'objets par les caméras EO / IR | |
| Taux de mise à jour du pixel de déviation | 60Hz |
| Contraste minimal de l'objet | 5% |
| Taille minimale de l'objet | 16*16 pixels |
| Taille maximale de l'objet | 128*128 pixels |
| Vitesse de suivi | >48 pixel/frame |
| Durée de la mémoire des objets | 100 cadres |
| Caractéristiques | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, date and time |
| Géolocalisation | Affichage de l'heure et des coordonnées GPS dans l'image exif |
| Lecture de cartes en ligne | HTTP lire des images ou des vidéos |
| KLV (UDP) (optionnel) | Enregistrement sur carte ou lecture vidéo Viewlink |
| ArduPilot / PX4 | Prise en charge (protocole Mavlink) Optionnel : Prise en charge de la fonction Follow me d'Ardupilot |
| Assemblage vidéo | EO+IR /IR+EO /EO /IR |
| Sortie double flux vidéo | Non pris en charge (sortie à deux flux EO et IR) |
| Informations sur l'emballage | |
| N.W. | 310±10g (with damping system) |
| Mesure du produit. | 92.3*68.1*112.9mm |
| Accessoires | 1pc gimbal camera device, screws, dampers, Connecting line, UART and power connector, Ethernet cable, USB to TTL cable / Hight quality box with foam cushion |
| G.W. | 720g |
| Mesure de l'emballage. | 200*200*150mm |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “Hawkeye U818 series Micro Prime Lens Dual Sensor Tracking Camera for Surveillance”
Vous devez être connecté pour publier un avis.
Produits similaires




Cardans et charge utile
Q40TIR Caméra de poursuite 4K à double capteur thermique IR 40x Zoom 50mm haute résolution
€0.00


Cardans et charge utile
€21,449.00


Cardans et charge utile
€4,499.00




Cardans et charge utile
U30T - Cardan optimisé à 2 axes pour caméra avion VTOL et UAV multirotor
€4,499.00


Cardans et charge utile
VOM-42 - Caméra de cartographie 42MP pour les levés aériens sur de grandes surfaces
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cardans et charge utile
€12,799.00
Avis
Il n’y a pas encore d’avis.