
















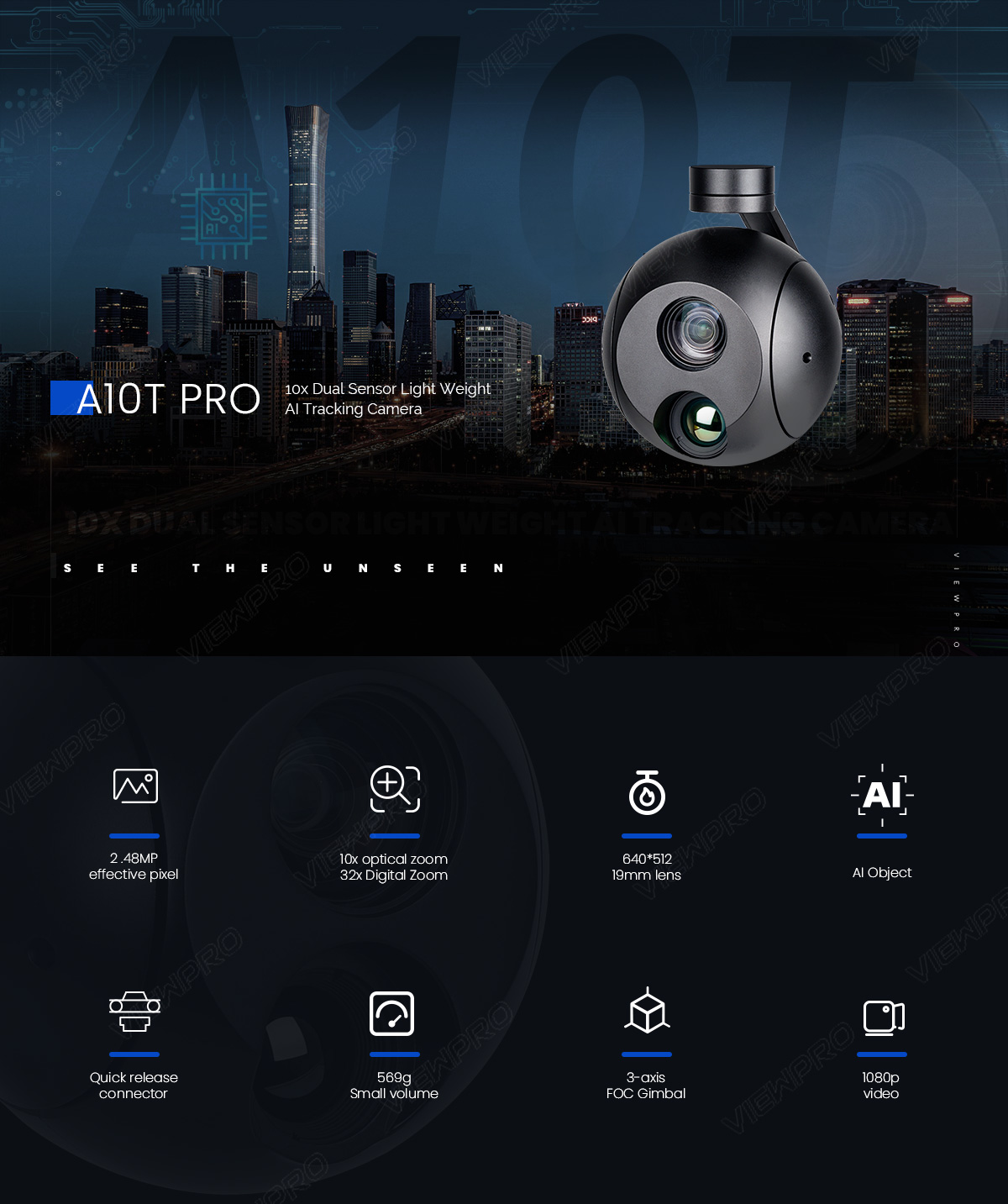
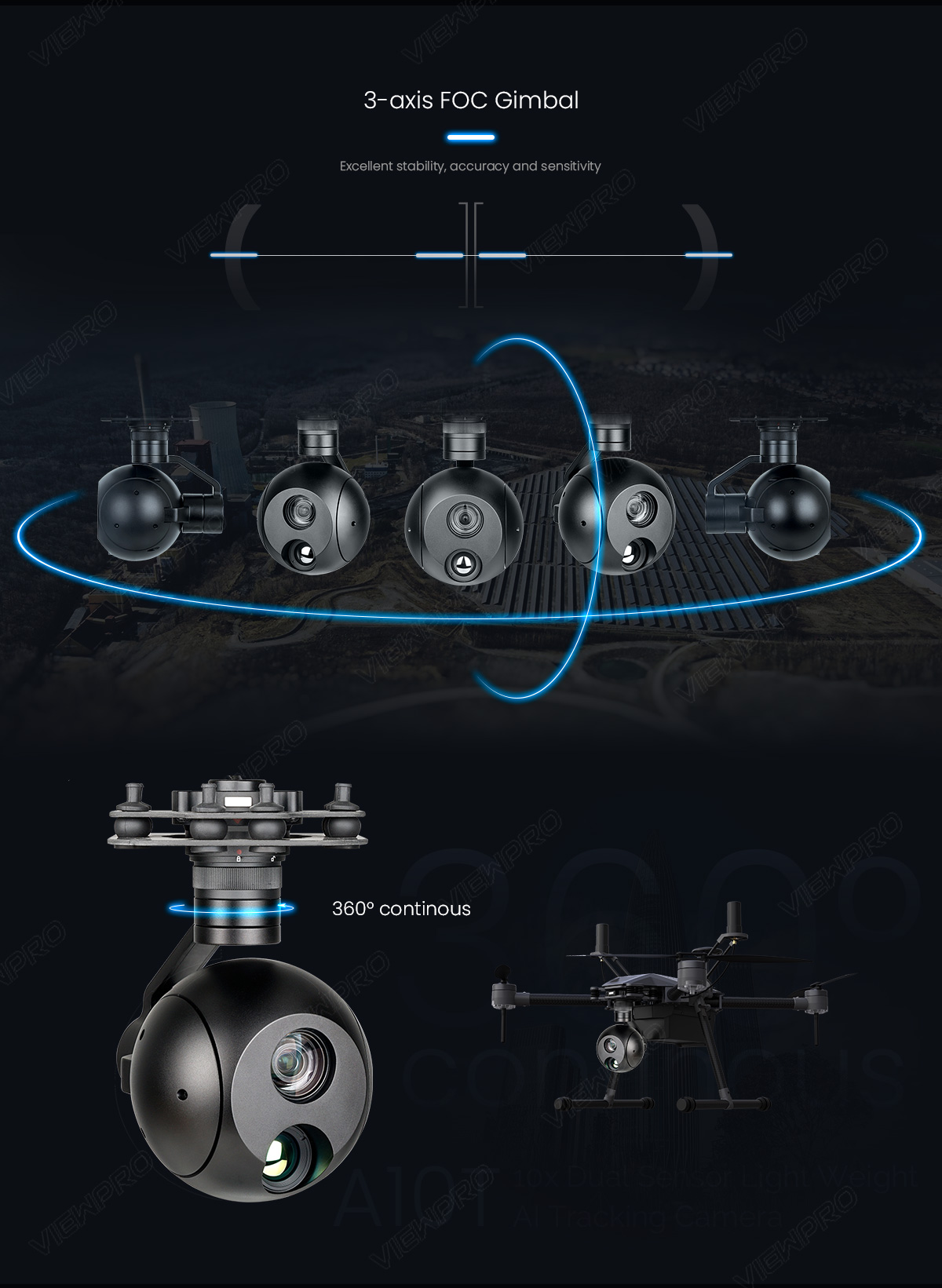
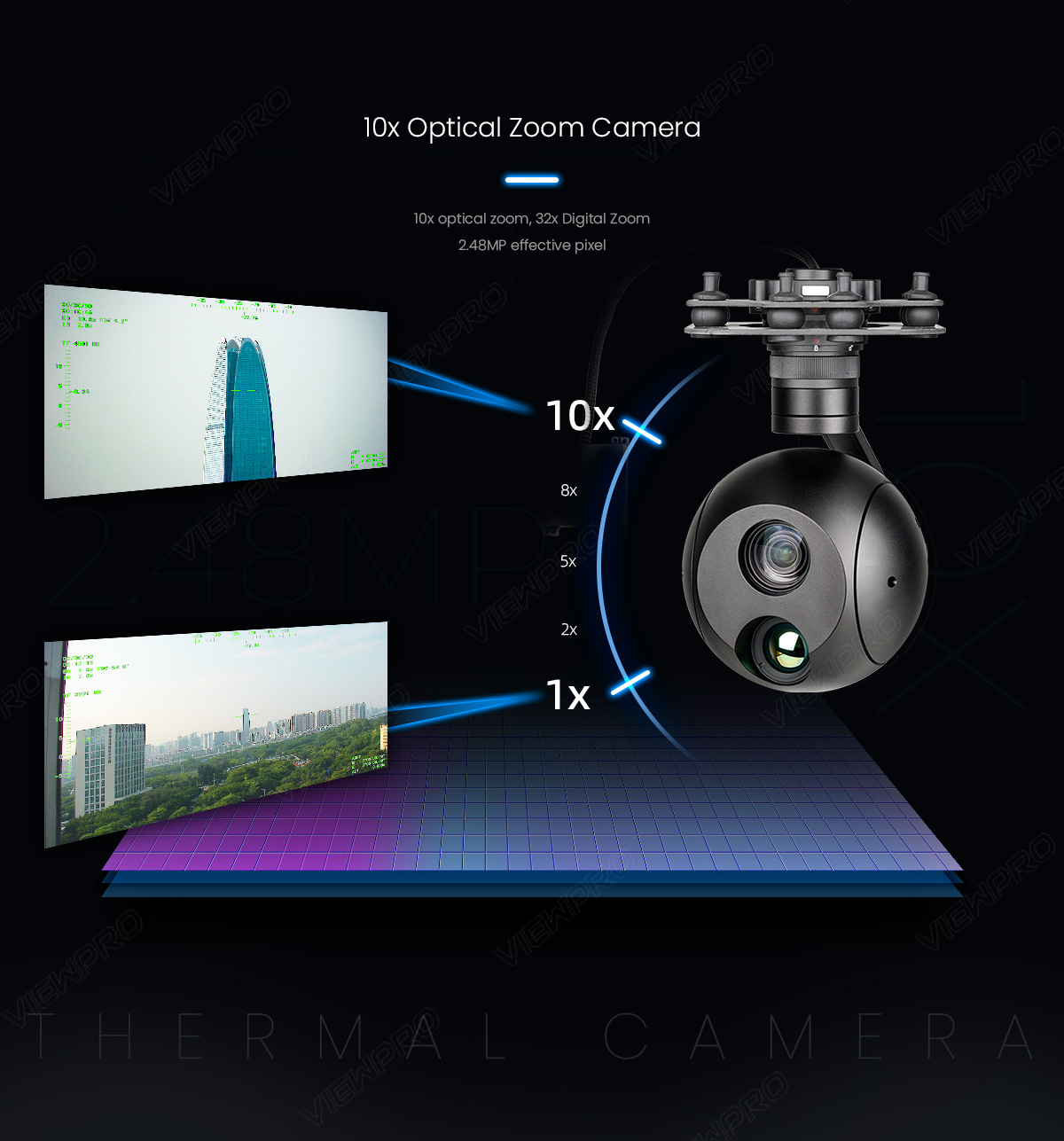
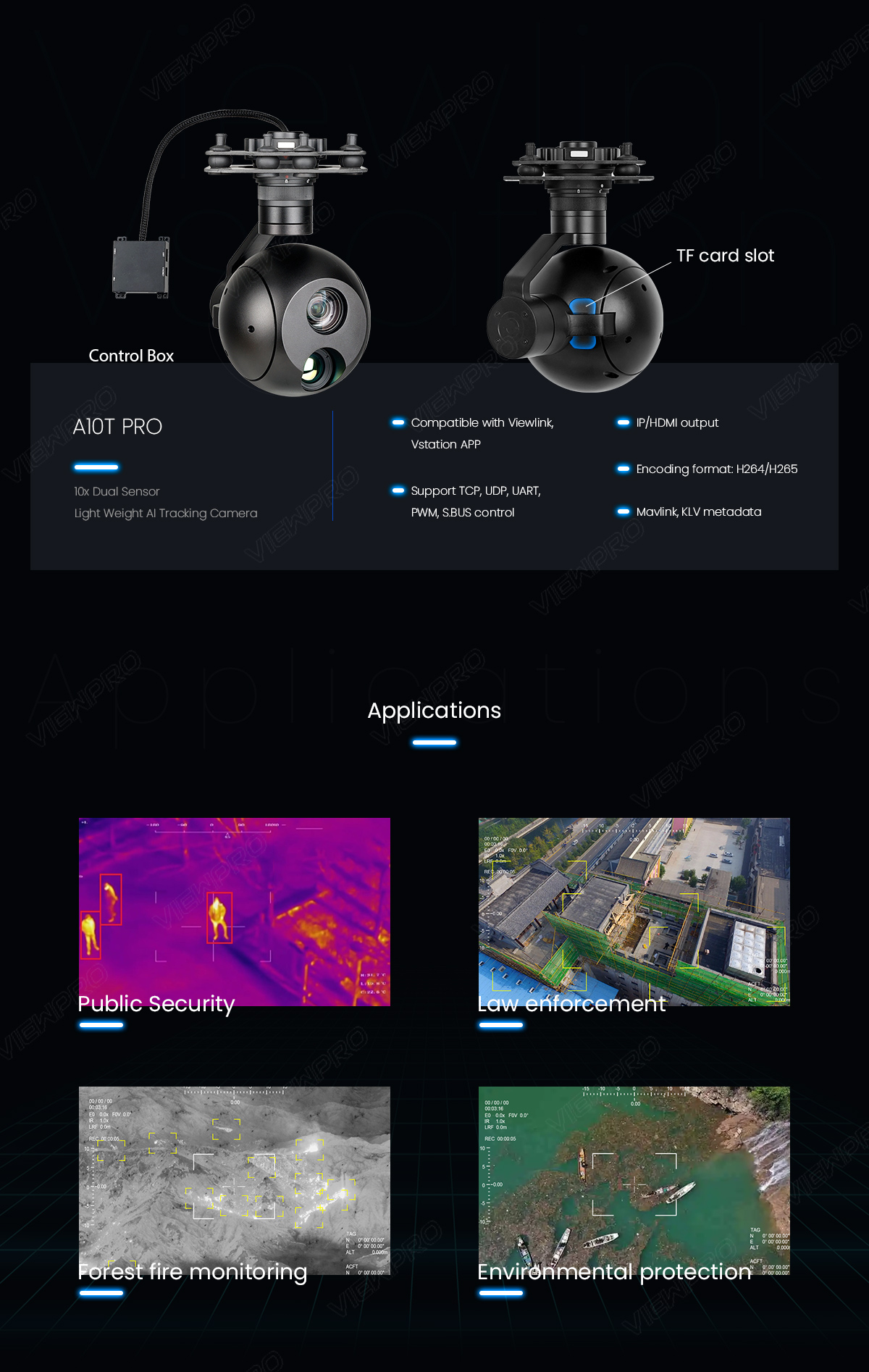
A10T Pro is a dual-sensor gimbal camera featuring 539g light net weight, small volume and compact structure, which integrates a 10x optical zoom camera and a 19mm lens 640*512 thermal camera. It with 3-axis high-precision gimbal which has advantages of better metal texture, anti-interference and better heat dissipation. It is integrated with AI object identification and tracking module, which can realize car and human automatic recognition and tracking, It widely used in UAV industries of inspection, surveillance, search and rescue and other industrial applications.




| Paramètres du matériel | |
| Tension de fonctionnement | 16V |
| Tension d'entrée | 4S ~ 6S (14,8V~25,2V) |
| Tension de sortie | 5V (connexion avec PWM) |
| Courant dynamique | 700~1250mA @ 16V |
| Consommation électrique | Average 11.2W, Max 20W |
| Environnement de travail temp. | -20℃ ~ +50℃ |
| Sortie | micro HDMI(1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Stockage local | Carte SD (jusqu'à 256G, classe 10, FAT32) |
| Format de stockage des photos | JPG (1920*1080) |
| Format de stockage vidéo | MP4 (1080P 30fps) |
| Méthode de contrôle | PWM / TTL / S.BUS / TCP / UDP |
| Spécifications du cardan | |
| Angle scope of structure design | Pitch/Tilt: -50°~135°, Roll: ±70°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Angle scope of software design | Pitch/Tilt: -45°~130°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| Angle de vibration | Tangage, roulis et lacet : ±0,02°. |
| Une seule touche pour centrer | √ |
| Spécifications de la caméra EO | |
| Capteur d'image | 1/2.8″ SONY CMOS Sensor |
| Total des pixels | 5.13MP |
| Qualité de l'image | Full HD 1080 (1920*1080) |
| Zoom optique | 10x, f = 4.7mm ~ 47mm, F1.7~F3.1 |
| Zoom numérique | 32x |
| Angle of View (H) | 69.9°(Wide end) ~ 8.7° (Tele end) |
| Min target distance | 0.1 / 1.5 / 3.0 / 5.0 / 10.0 m |
| Éclairage minimal | Color(1/30s, 72.0dB): 0.02 lux , BW(1/30s, 72.0dB): 0.005lux Color DSS(1/1s, 72.0dB): 0.002 lux , BW DSS(1/1s, 72.0dB): 0.0005 lux |
| Balance des blancs | Auto / One Push / Manuel / Intérieur / Extérieur |
| Vitesse d'obturation | 1/1sec ~ 1/100,000 sec |
| Focus | Auto / One Push / Manuel |
| Exposition | Auto / Manual / Priority Mode (Shutter priority & aperture priority) |
| Compensation du rétroéclairage | Oui |
| Auto ICR | Oui |
| Image stabilization | Oui |
| Désembuage | Oui |
| Spécifications de l'imageur thermique IR | |
| Longueur de mise au point | 19 mm |
| FOV horizontal | 22.9° |
| FOV vertical | 18.4° |
| Diagonale FOV | 29.0° |
| Distance de détection (homme : 1,8×0,5m) | 792 mètres |
| Reconnaître la distance (Homme : 1.8×0.5m) | 198 mètres |
| Distance vérifiée (homme : 1,8×0,5m) | 99 mètres |
| Distance de détection (voiture : 4,2×1,8m) | 2428 mètres |
| Reconnaître la distance (voiture : 4,2×1,8m) | 607 mètres |
| Distance vérifiée (voiture : 4,2×1,8m) | 303 mètres |
| Mode de travail | Imageur thermique VOx à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*512 |
| Taille du pixel | 12μm |
| Méthode de mise au point | Lentille primaire athermique |
| NETD | ≤50mK@25℃, F#1.0 (<=40mk Optional) |
| Palette de couleurs | Blanc, rouge fer, pseudo-couleur |
| Zoom numérique | 1x~4x continuous zoom ( step length 0.1) |
| Radiometric function(optional) | Optional (-20℃~+150℃, +100℃~+550℃) |
| EO / IR Camera Object Tracking | |
| Taux de mise à jour du pixel de déviation | 30Hz |
| Retard de sortie du pixel de déviation | <30ms |
| Contraste minimal de l'objet | 5% |
| SNR | 4 |
| Taille minimale de l'objet | 16*16 pixels |
| Taille maximale de l'objet | 256*256 pixels |
| Vitesse de suivi | ±48 pixels/image |
| Durée de la mémoire des objets | 100 cadres |
| Performances de l'IA de la caméra EO | |
| Type de cible | La voiture et l'homme |
| Quantité de détection simultanée | ≥ 10 cibles |
| Rapport de contraste minimal | 5% |
| Taille minimale de l'objectif | 5×5 pixels |
| Taux de détection des voitures | ≥85% |
| Taux de fausses alarmes | ≤10% |
| Caractéristiques | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, target ranging point GPS and altitude, date and time |
| Géolocalisation | Affichage de l'heure et des coordonnées GPS dans l'image exif |
| Lecture de cartes en ligne | HTTP lire des images ou des vidéos |
| KLV (UDP) | Enregistrement sur carte ou lecture vidéo Viewlink |
| ArduPilot / PX4 | Prise en charge (protocole Mavlink) Optionnel : Prise en charge de la fonction Follow me d'Ardupilot |
| Assemblage vidéo | EO+IR /IR+EO /EO /IR |
| Sortie double flux vidéo (en option) | Prise en charge (sortie à deux flux EO et IR, remarques : impossible d'enregistrer une fois la sortie vidéo dulal activée) |
| Informations sur l'emballage | |
| N.W. | 745±10g(Viewport version with Viewport) |
| Mesure du produit. | 121.5*96*161.6mm / 121.5*96*167.3mm(Viewport Version) |
| Accessoires | 1pc gimbal camera device, screws, USB to TTL cable / Hight quality box with foam cushion |
| G.W. | 1815g |
| Mesure de l'emballage. | 300*250*200mm |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “A10T Pro 10x Dual Sensor Light Weight AI Tracking Camera”
Vous devez être connecté pour publier un avis.
Produits similaires


Cardans et charge utile
Q30TIRM Pro 30x Zoom EO/IR 3KM High-level Laser Rangefinder Object Tracking Camera


Cardans et charge utile
Q30TIR lite 30x EO + 25mm IR Dual Sensor 3axis Gimbal Camera for UAV




Cardans et charge utile
VOM-42 - Caméra de cartographie 42MP pour les levés aériens sur de grandes surfaces


Cardans et charge utile




Cardans et charge utile
VO305 UH Definition 3D Oblique Camera UAV Aerial Mapping and Surveying


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cardans et charge utile
Avis
Il n’y a pas encore d’avis.