













| Hardware Parameters | |
| Tension de fonctionnement | 16V |
| Tension d'entrée | 4S ~ 6S |
| Tension de sortie | 5V (connexion avec PWM) |
| Courant dynamique | 1200~2500mA @ 16V |
| Environnement de travail temp. | -20°C ~ +60°C |
| Sortie vidéo | micro HDMI (1080P 30/60fps) / IP Rtsp (720P/1080P 30fps) |
| Stockage local | Carte SD (jusqu'à 128G, classe 10, format FAT32 ou ex FAT) |
| Format de stockage des photos | JPG (1920*1080) |
| Format de stockage vidéo | MP4 (1080P 30fps) |
| Network reader | HTTP reading |
| Méthode de contrôle | PWM / S.BUS / TTL / TCP(IP output version) / UDP(IP output version) |
| Gimbal Parameters | |
| Gamme mécanique | Pitch/Tilt: -60°~130°, Roll: ±40°,Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Gamme contrôlable | Pitch/Tilt: -45°~90°,Yaw/Pan: ±290° / ±360°*N (IP output version) |
| Angle de vibration | Pitch/Roll/Yaw:±0.02° |
| Une seule touche pour centrer | √ |
| Camera Parameters | |
| Capteur d'image | 1/2.8″ Sony CMOS |
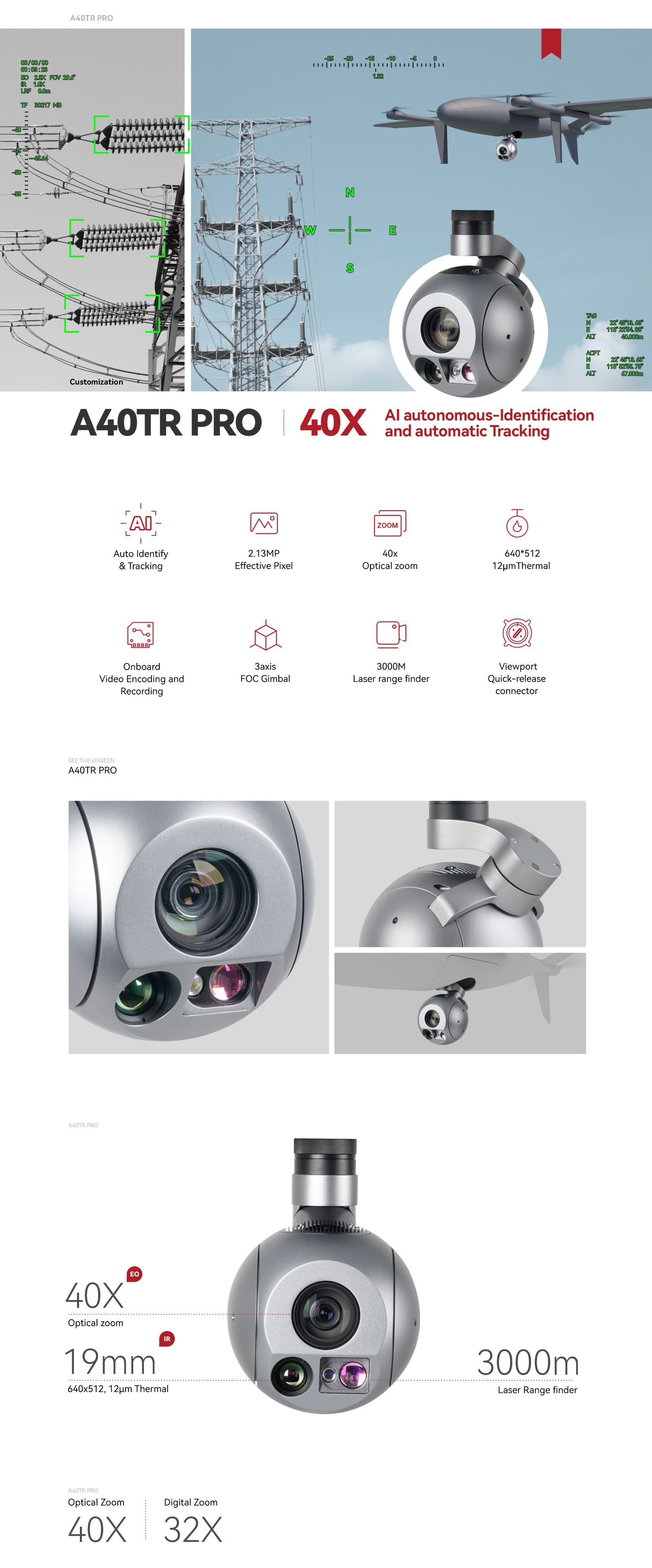
| Pixel effectif | 5.13 MP |
| Lentille | Optical zoom: 40x f = 4.25 mm (Wide), 170 mm (Tele) F1.6 to F4.95 |
| Zoom numérique | 32x |
| Angle de vue ( H ) | 66.35°(Wide) ~ 1.9°(Tele) |
| Min. object distance | 0.1 / 1.5 / 3.0 / 5.0 / 10.0 m |
| Focus | Auto / One-click auto focus / Manual |
| Balance des blancs | Auto / Indoor / Outdoor / One-key / Manual |
| Vitesse d'obturation | 1/1 to 1/30,000 S |
| Contrôle de l'exposition | Auto / Manual / Priority mode ( Shutter priority / Aperture priority ) |
| Système de synchronisation | Interne |
| Compensation du contre-jour | Oui |
| Auto ICR | Oui |
| Progressive scan | Oui |
| Image stabilizer | Oui |
| Mode désembuage | Oui |
| IR Thermal Imager Parameters | |
| Longueur de mise au point | 19 mm |
| Film d'enrobage | DLC |
| FOV horizontal | 22.9° |
| FOV vertical | 18.4° |
| Diagonale FOV | 29.0° |
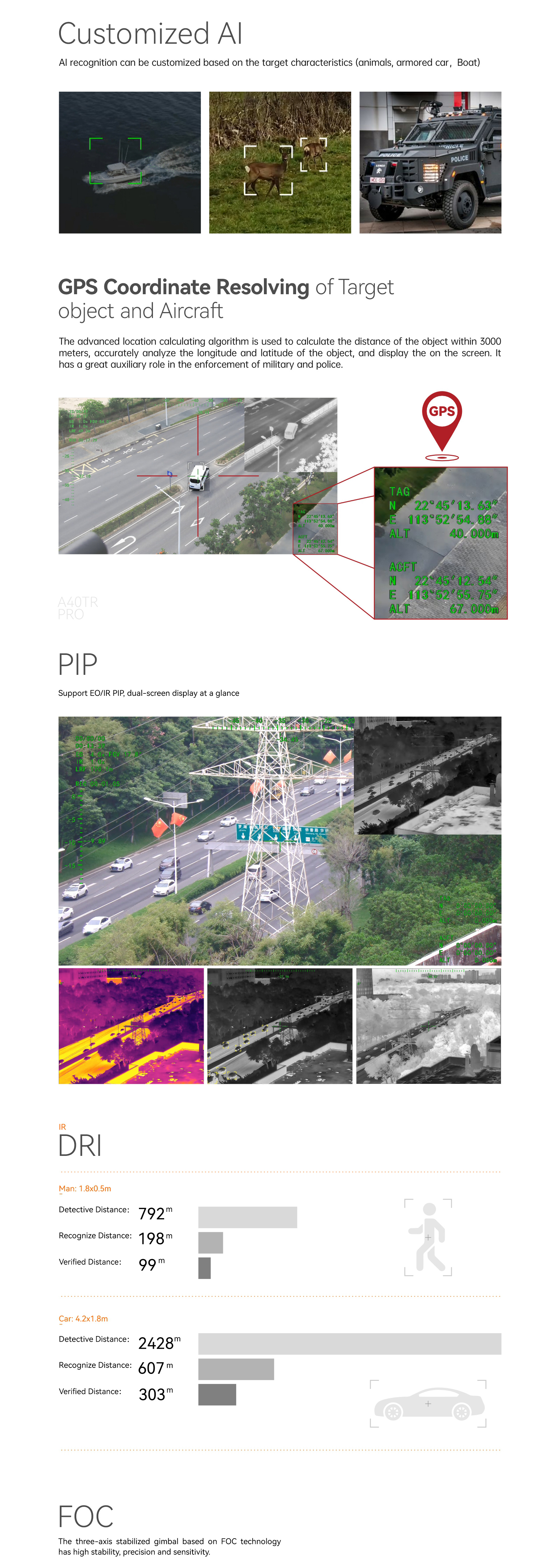
| Distance de détection (homme : 1,8×0,5m) | 792 mètres |
| Reconnaître la distance (Homme : 1.8×0.5m) | 198 mètres |
| Distance vérifiée (homme : 1,8×0,5m) | 99 mètres |
| Distance de détection (voiture : 4,2×1,8m) | 2428 mètres |
| Reconnaître la distance (voiture : 4,2×1,8m) | 607 mètres |
| Distance vérifiée (voiture : 4,2×1,8m) | 303 mètres |
| Mode de travail | Imageur thermique à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*512 |
| Taille du pixel | 12μm |
| Méthode de mise au point | Lentille primaire athermique |
| NETD | ≤50mK @F.0 @25℃ |
| Palette de couleurs | Blanc chaud, noir chaud, pseudo-couleur |
| Zoom numérique | 1x ~ 8x |
| Synchronisation de l'heure exacte | Oui |
| EO / IR Camera Object Tracking Parameters | |
| Taux de mise à jour du pixel de déviation | 30Hz |
| Retard de sortie du pixel de déviation | <30ms |
| Contraste minimal de l'objet | 5% |
| SNR | 4 |
| Taille minimale de l'objet | 16*16 pixels |
| Taille maximale de l'objet | 256*256 pixels |
| Vitesse de suivi | 48 pixel/frame |
| Durée de la mémoire des objets | 100 cadres |
| AI Tracking Linkage | Oui |
| Laser Rangefinder Parameters | |
| Portée effective | For Vehicle≥3000m For human≥2000m |
| Minimum range of measurement | 15m |
| Range accuracy | ±1m |
| Range frequency | 1~10Hz |
| Longueur d'onde | 1535±5nm |
| Divergence angle | ~0.6mrad |
| Coordinate resolve | Logitude and latitude of target |
| Measurement | Measure distance from center of object to laser rangefinder sensor |
| Camera AI Recogn | ition Performance Parameters |
| Target type | Vehicle, Human |
| Quantité de détection simultanée | ≥10 targets |
| Contrast ratio | ≥5% |
| Minimum size of target | 5 X 5 pixel |
| Vehicle detection ratio | ≥85% |
| False alarm ratio | ≤10% |
| Informations sur l'emballage | |
| N.W. | 1136g (Viewport Version) |
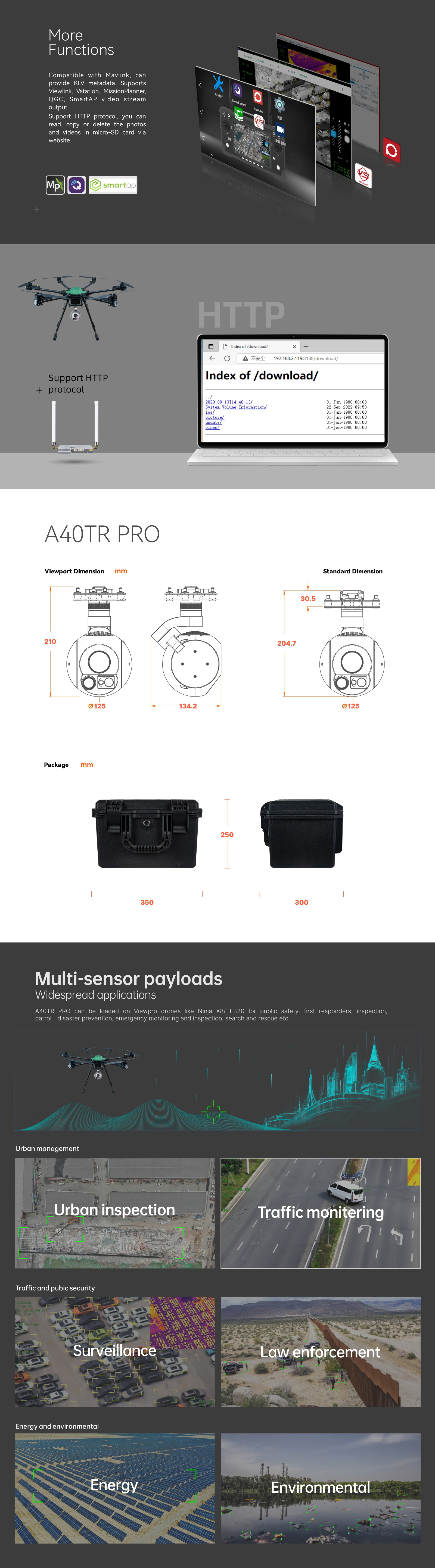
| Mesure du produit. | 134.2*125*210.4mm(Viewport Version) |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “A40TR Pro 40x EO + IR+ LRF AI Object Tracking Gimbal Camera”
Vous devez être connecté pour publier un avis.
Produits similaires






Cardans et charge utile
U30T - Cardan optimisé à 2 axes pour caméra avion VTOL et UAV multirotor
€4,499.00


Cardans et charge utile
Hawkeye U818 série Micro Prime Lens Dual Sensor Tracking Camera for Surveillance
€0.00


Cardans et charge utile
€14,999.00


Cardans et charge utile
U2 Ultra Léger Micro Prime LensDual EO Sensors FHD 1080P Object Tracking Gimbal Camera
€0.00


Cardans et charge utile
Q30TM Caméra Gimbal 30x à résolution de coordonnées GPS d'objets et LRF
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cardans et charge utile
Q30TIR lite 30x EO + 25mm IR Dual Sensor 3axis Gimbal Camera for UAV
€8,999.00
Avis
Il n’y a pas encore d’avis.