


















| Paramètres du matériel | |
| Tension de fonctionnement | 16V |
| Tension d'entrée | 4S ~ 6S (14,8V~25,2V) |
| Courant dynamique | 530~1000mA @ 16V |
| Consommation électrique | 8,5W ~ 16W |
| Environnement de travail temp. | -20℃ ~ +60℃ |
| Taux IP | IP43 |
| Sortie | IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Stockage local | Carte SD (jusqu'à 256G, classe 10, FAT32) |
| Format de stockage des images sur la carte TF | JPG (1920*1080) |
| Format de stockage vidéo dans la carte TF | MP4 (1080P 30fps) |
| Méthode de contrôle | TTL ou S.BUS (choisir l'un des deux, et TTL par défaut), et TCP/UDP |
| Spécifications du cardan | |
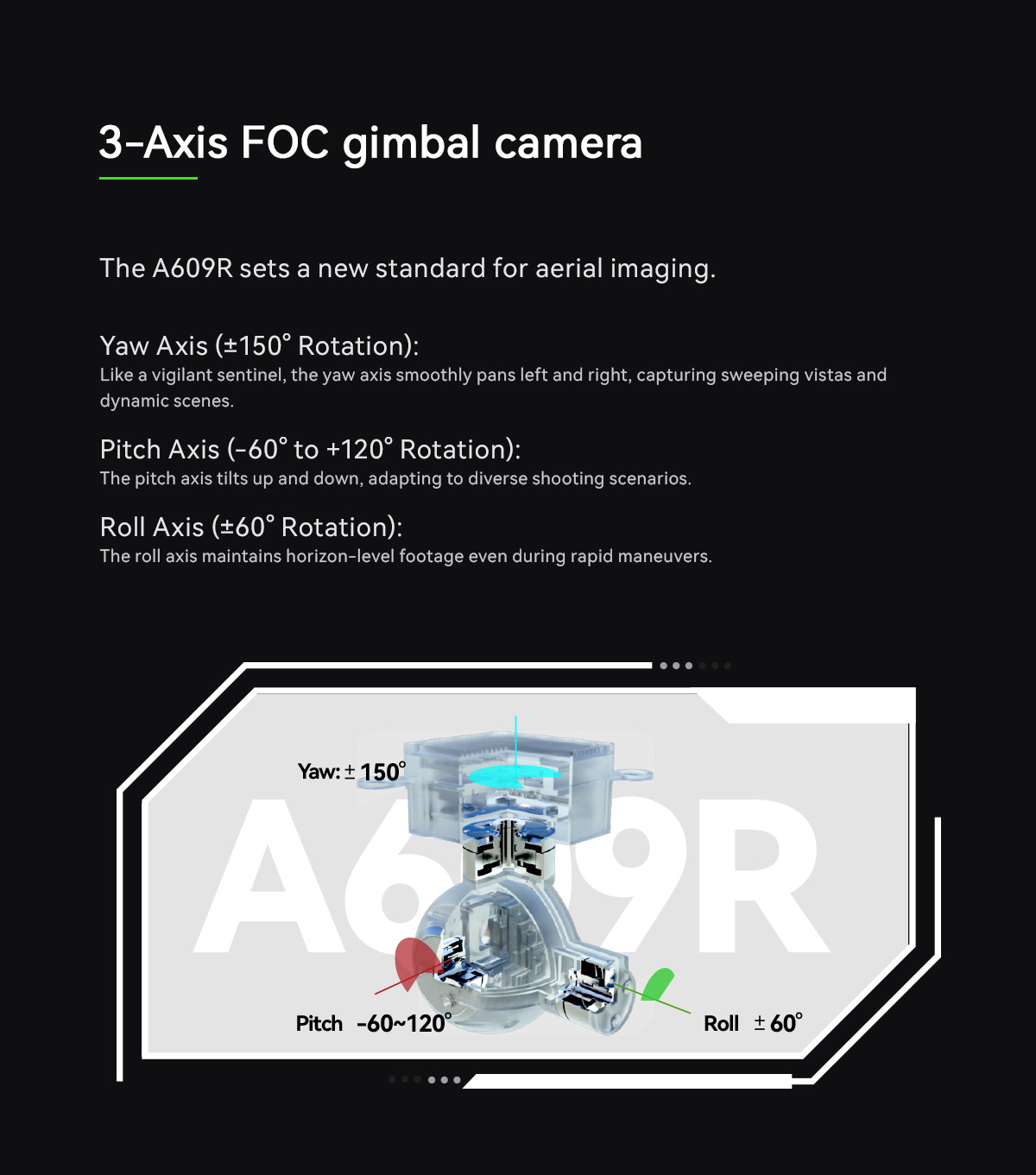
| Gamme mécanique | Tangage/inclinaison : -45°~130°, roulis : ±60°, lacet/panne : ±150°. |
| Gamme contrôlable | Tangage/Inclinaison : -40°~125°, lacet/plan : ±145° |
| Angle de vibration | Tangage, roulis et lacet : ±0,02°. |
| Une seule touche pour centrer | √ |
| Spécifications de la caméra EO | |
| Capteur d'image | Capteur CMOS 1/2,9 |
| Pixel de l'image | 2MP |
| Qualité de l'image | Full HD 1080 (1920*1080) |
| Longueur de mise au point | 6 mm |
| Zoom numérique | 1x~12x |
| Angle de vue (D,H,V) | FOV:D 60° H 50° V 28° |
| Spécifications de l'imageur thermique IR | |
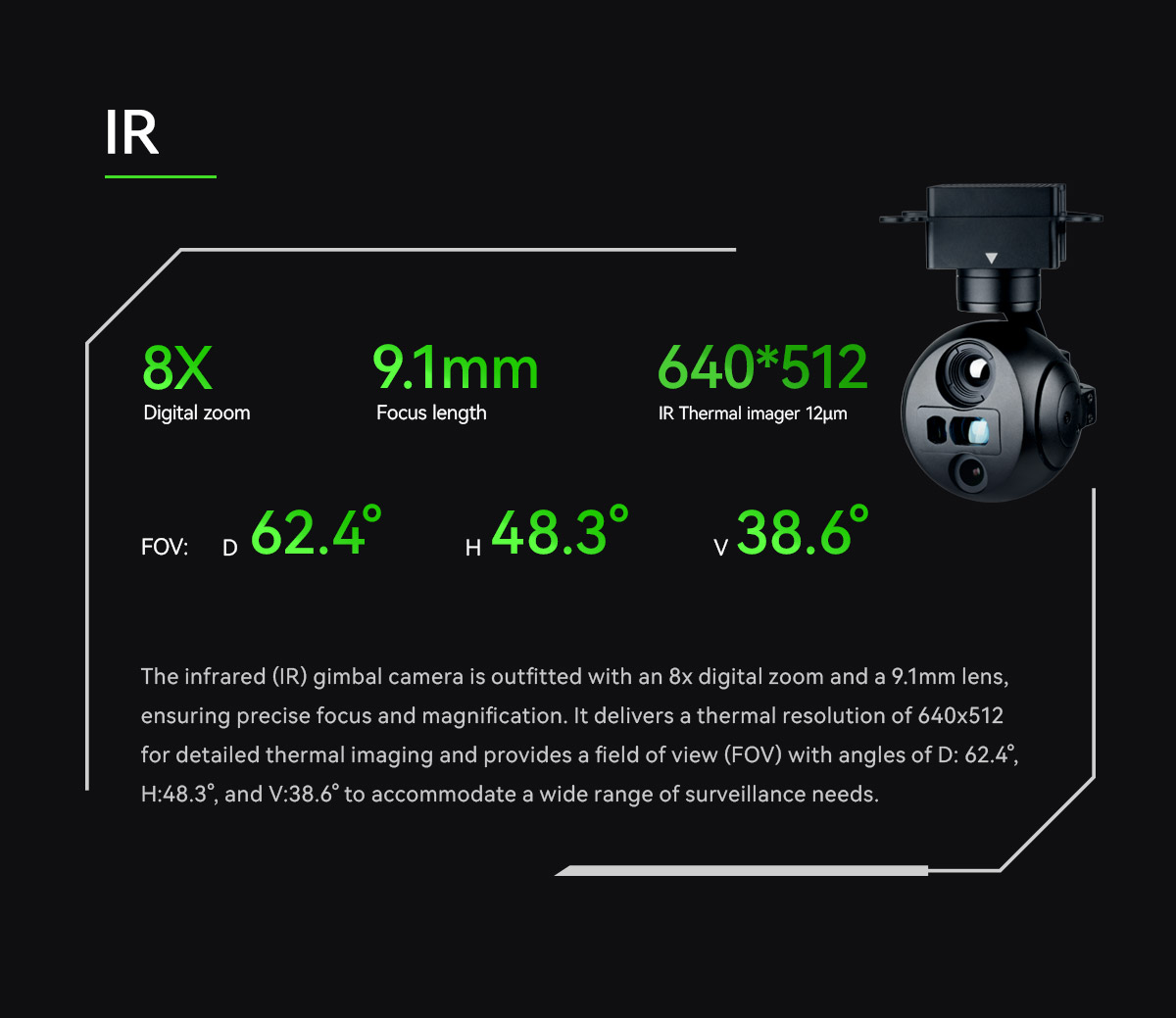
| Longueur de mise au point | 9,1 mm |
| FOV horizontal | 48.3° |
| FOV vertical | 38.6° |
| Diagonale FOV | 62.4° |
| Mode de travail | Imageur thermique VOx à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 640*512 |
| Taille du pixel | 12μm |
| Zoom numérique | 1x~8x |
| Méthode de mise au point | Lentille primaire athermique |
| NETD | ≤40mK (@25℃,@F1.0) |
| Palette de couleurs | Blanc, noir, pseudo-couleur |
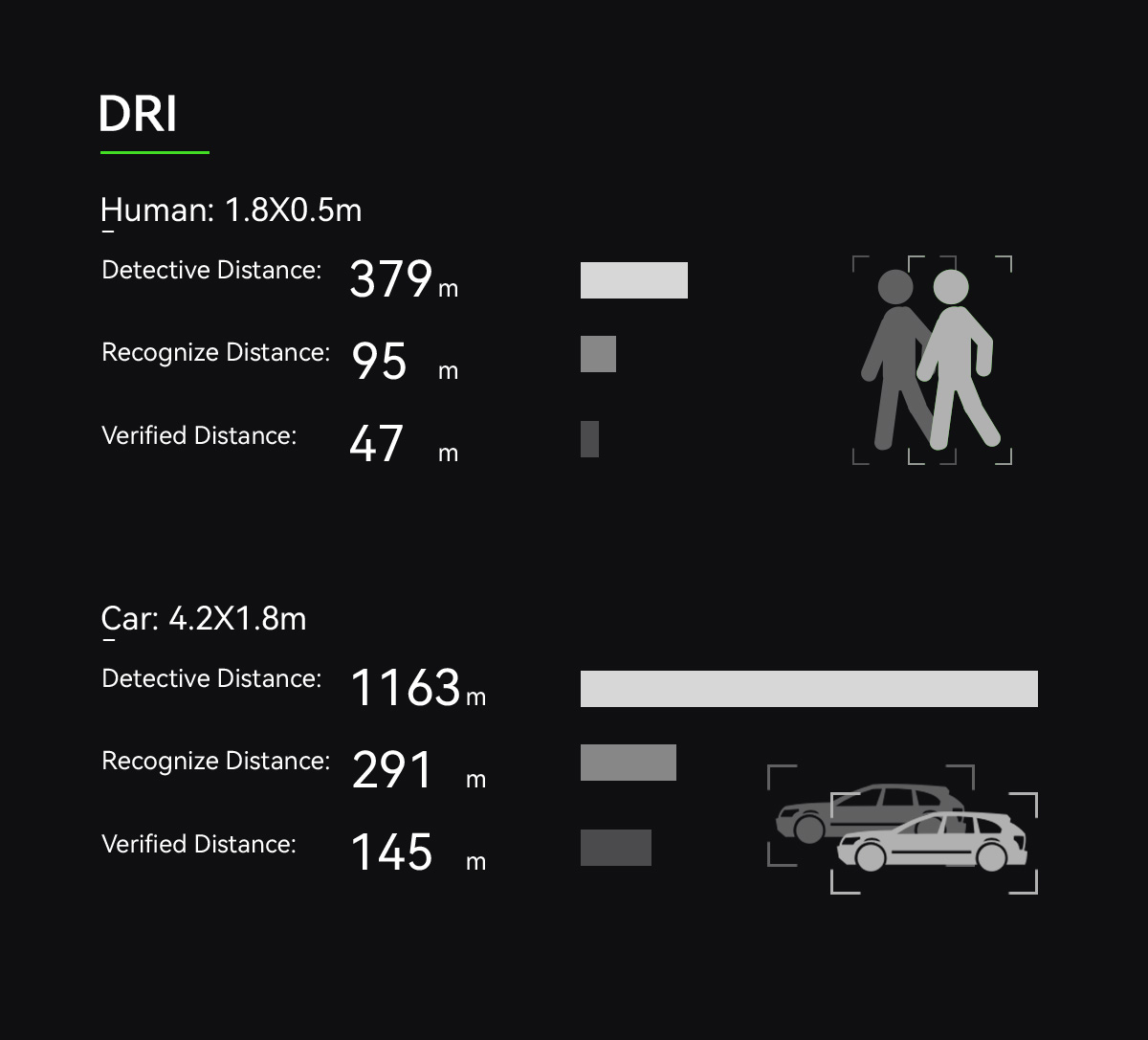
| Distance de détection (homme : 1,8×0,5m) | 379 mètres |
| Reconnaître la distance (Homme : 1.8×0.5m) | 95 mètres |
| Distance vérifiée (homme : 1,8×0,5m) | 47 mètres |
| Distance de détection (voiture : 4,2×1,8m) | 1163 mètres |
| Reconnaître la distance (voiture : 4,2×1,8m) | 291 mètres |
| Distance vérifiée (voiture : 4,2×1,8m) | 145 mètres |
| Fonction radiométrique (en option) | Prise en charge de la sortie des données de température en plein écran |
| Gamme optionnelle(-20℃~+150℃, +100℃~+550℃) | |
| ±2℃ ou ±2% de la lecture (la valeur la plus élevée étant retenue). | |
| Suivi d'objets par les caméras EO / IR | |
| Taux de mise à jour du pixel de déviation | 30Hz |
| Retard de sortie du pixel de déviation | <30ms |
| Contraste minimal de l'objet | 5% |
| SNR | 4 |
| Taille minimale de l'objet | 16*16 pixels |
| Taille maximale de l'objet | 256*256 pixels |
| Vitesse de suivi | ±48 pixels/image |
| Durée de la mémoire des objets | 100 cadres |
| Performances de la caméra EO/IR en matière d'intelligence artificielle | |
| Type de cible | La voiture et l'homme |
| Quantité de détection simultanée | ≥ 10 cibles |
| Rapport de contraste minimal | 5% |
| Taille minimale de l'objectif | 5×5 pixels |
| Taux de détection des voitures | ≥85% |
| Taux de fausses alarmes | ≤10% |
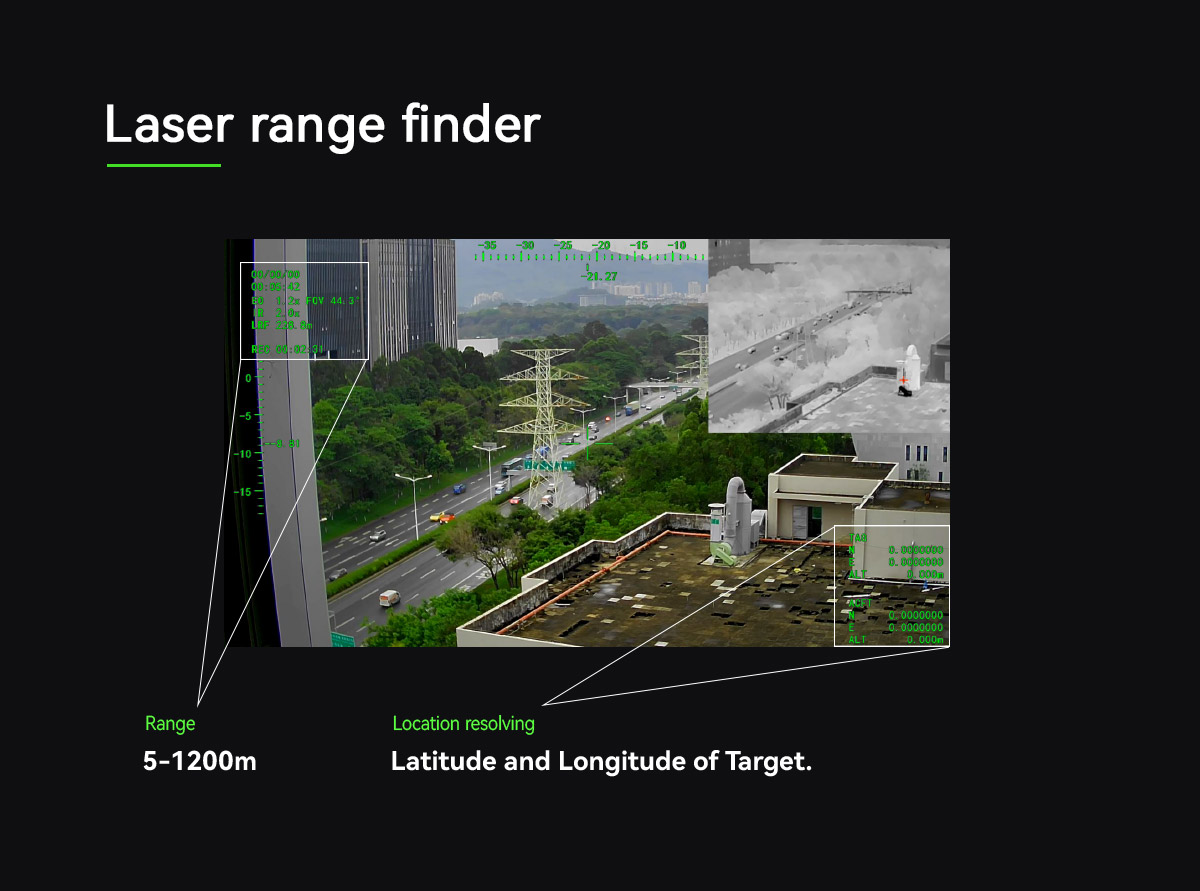
| Télémètre laser IR | |
| Gamme | 5~1200 mètres |
| Précision | 1m |
| Faisceau lumineux | Laser à impulsion 905 nm |
| Angle divergent | ~6 mrad |
| Fréquence d'impulsion du laser | 1~4Hz |
| Résolution des problèmes de localisation | Latitude et longitude de la cible |
| Télémètre | Mesurer la distance entre l'objet au centre de l'écran et le télémètre laser. |
| Caractéristiques | |
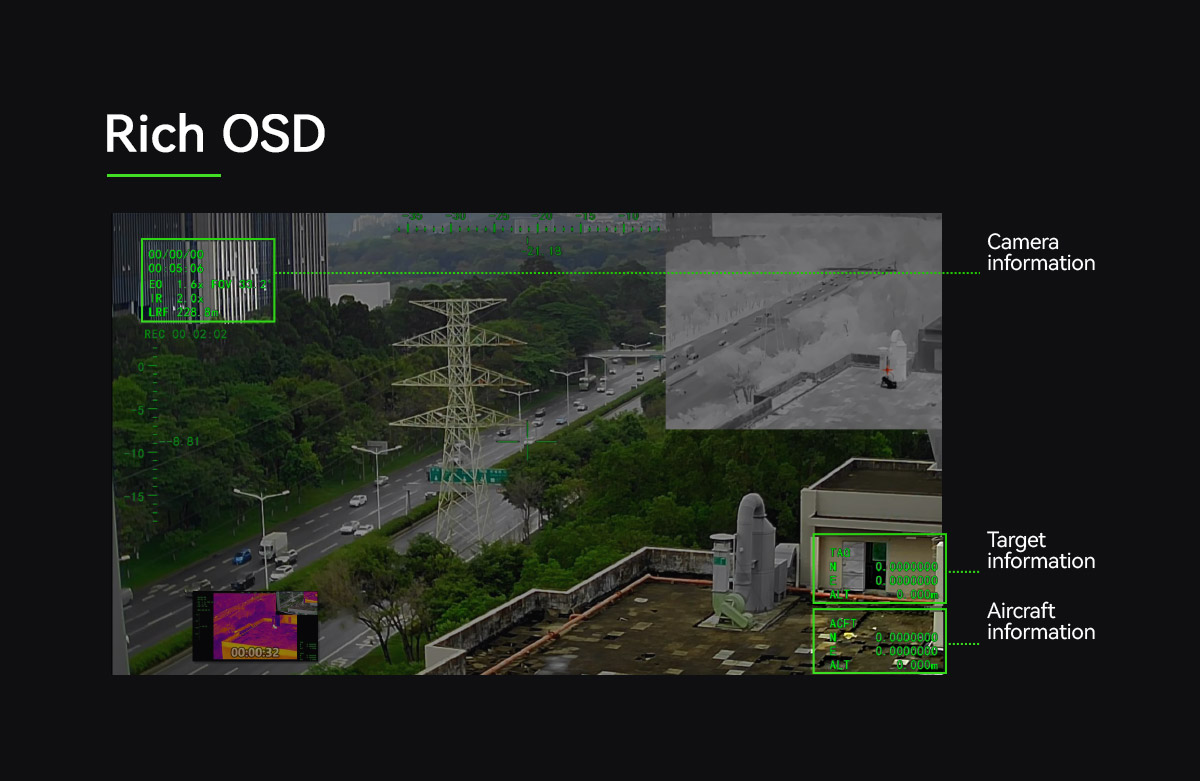
| OSD | Affichage de l'angle de lacet et de tangage du cardan, du grossissement, de la valeur de télémétrie, de la durée d'enregistrement de la carte, du GPS et de l'altitude de l'aéronef, du GPS et de l'altitude du point de télémétrie cible, de la date et de l'heure. |
| Géolocalisation | Affichage de l'heure et des coordonnées GPS dans l'image exif |
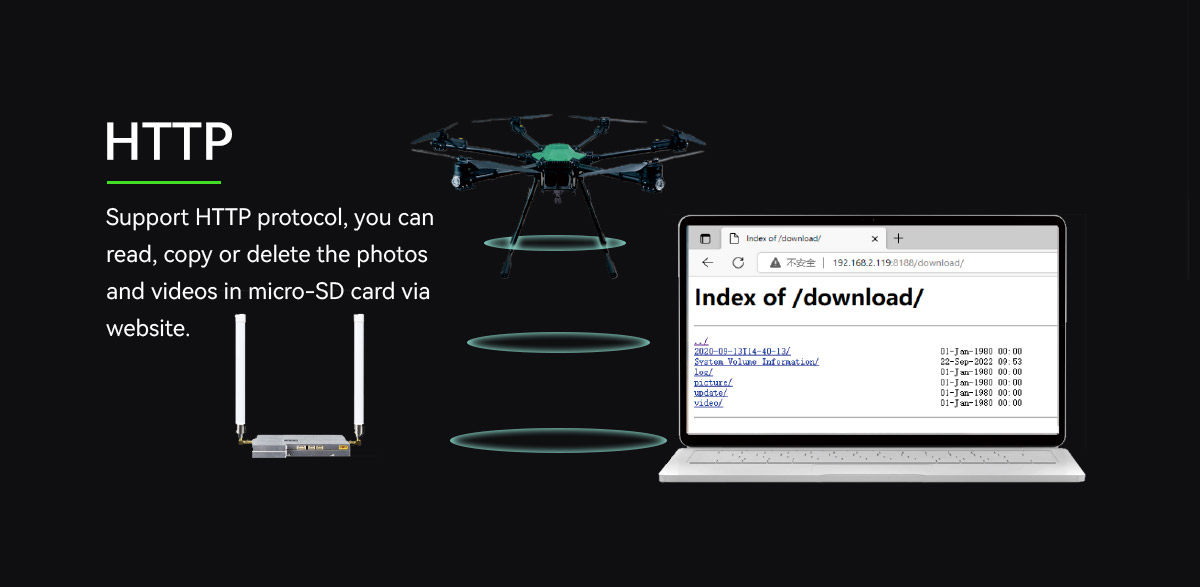
| Lecture de cartes en ligne | HTTP lire des images ou des vidéos |
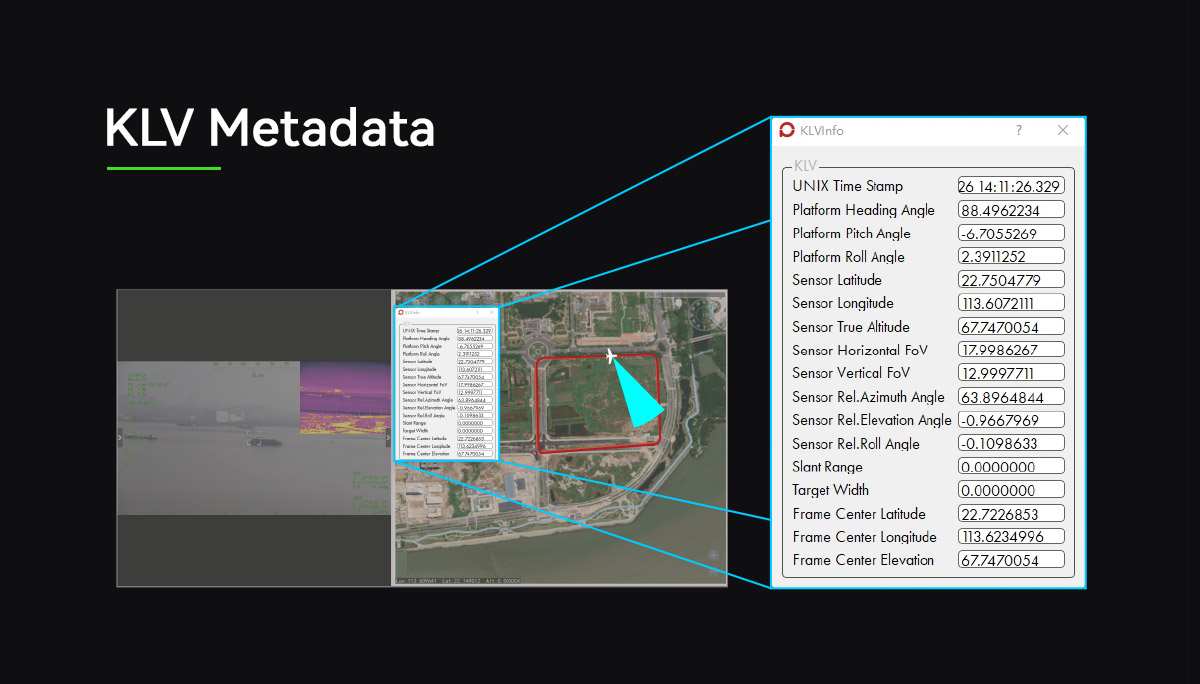
| KLV (UDP) | Enregistrement sur carte ou lecture vidéo Viewlink |
| ArduPilot / PX4 | Prise en charge (protocole Mavlink) Optionnel : Prise en charge de la fonction Follow me d'Ardupilot |
| Assemblage vidéo | EO+IR /IR+EO /EO /IR |
| Sortie double flux vidéo (en option) | Prise en charge (sortie à deux flux EO et IR, remarques : impossible d'enregistrer une fois la sortie vidéo dulal activée) |
| Informations sur l'emballage | |
| N.W. | 235±10g |
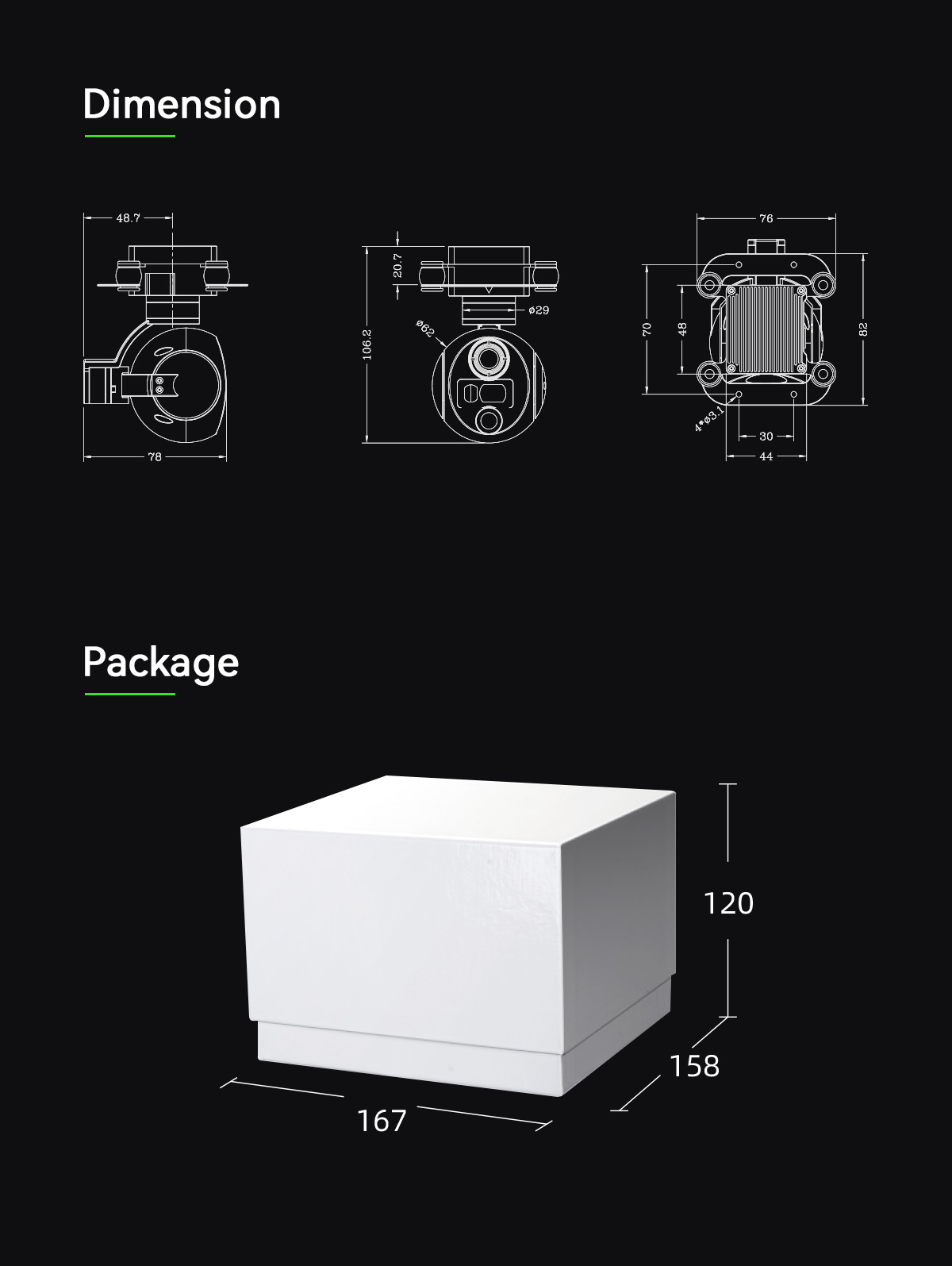
| Mesure du produit. | 78*62*106.2mm |
| Accessoires | vis, câble USB vers TTL, câble d'alimentation, câble multifonction, câble Ethernet, boîte de haute qualité avec coussin en mousse |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “A609R Ultra-Compact Triple-Sensor 3-Axis EO/IR & LRF Gimbal Camera”
Vous devez être connecté pour publier un avis.
Produits similaires


Cardans et charge utile
€12,799.00


Cardans et charge utile
VOM-42 - Caméra de cartographie 42MP pour les levés aériens sur de grandes surfaces
€0.00






Cardans et charge utile
€0.00


Cardans et charge utile
Q40TIR Caméra de poursuite 4K à double capteur thermique IR 40x Zoom 50mm haute résolution
€0.00


Cardans et charge utile
Q30TIR lite 30x EO + 25mm IR Dual Sensor 3axis Gimbal Camera for UAV
€8,999.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Avis
Il n’y a pas encore d’avis.