
















|
Processeur |
|
|
Processeur |
STM32H743 |
|
Poids |
100g |
|
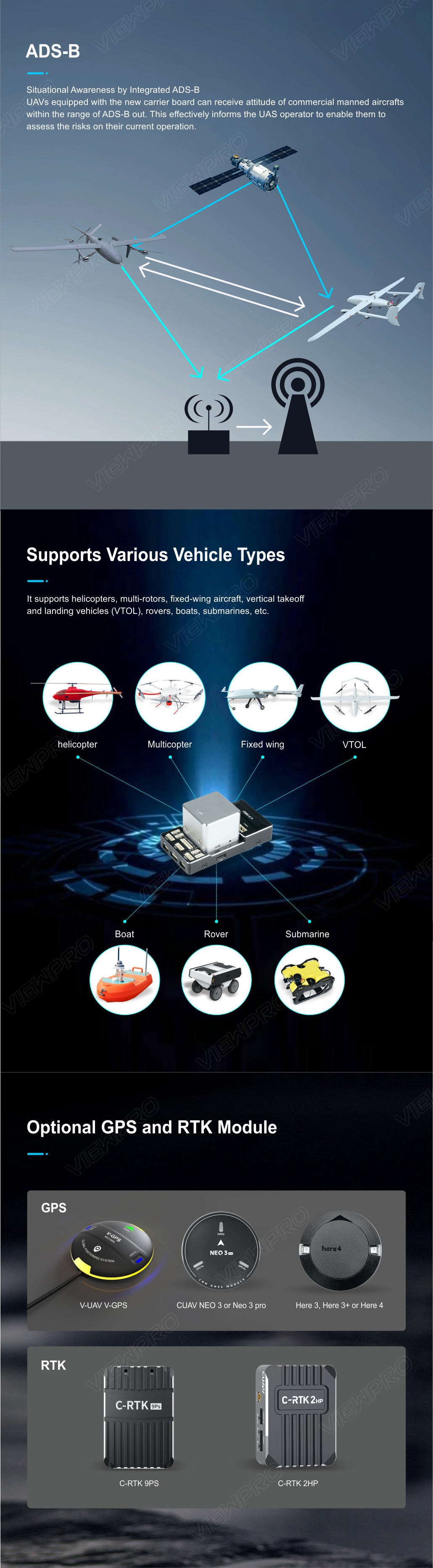
Compatible véhicule modèles |
Aéronef à voilure tournante, à voilure fixe, VTOL, hélicoptère, véhicule, bateau |
|
Firmware compatible |
Ardupilot 4.5.7 beta et supérieur |
|
Capteur |
|
|
Accéléromètre |
ADIS16470/ICM-42688-P/ICM-42688-P |
|
Gyroscope |
ADIS16470/ICM-42688-P/ICM-42688-P |
|
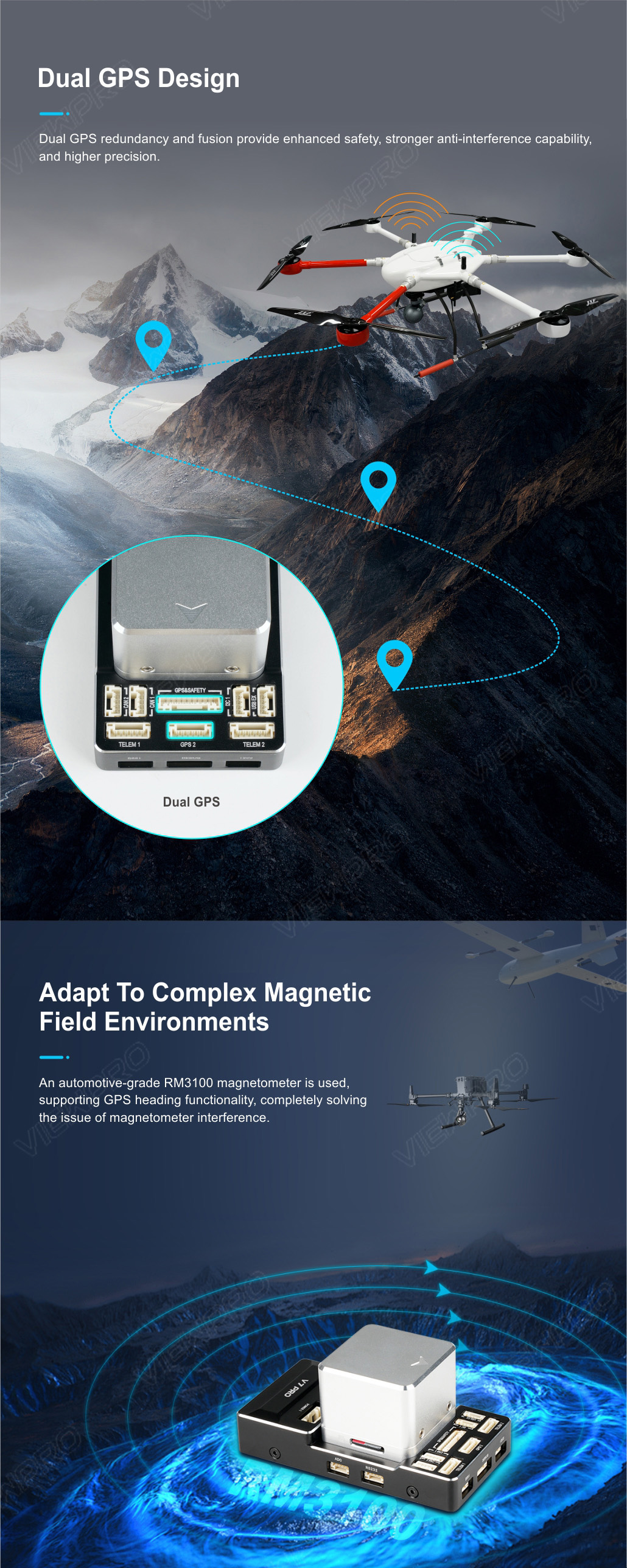
Compas électronique |
RM3100 |
|
Baromètre |
MS5611x2 |
|
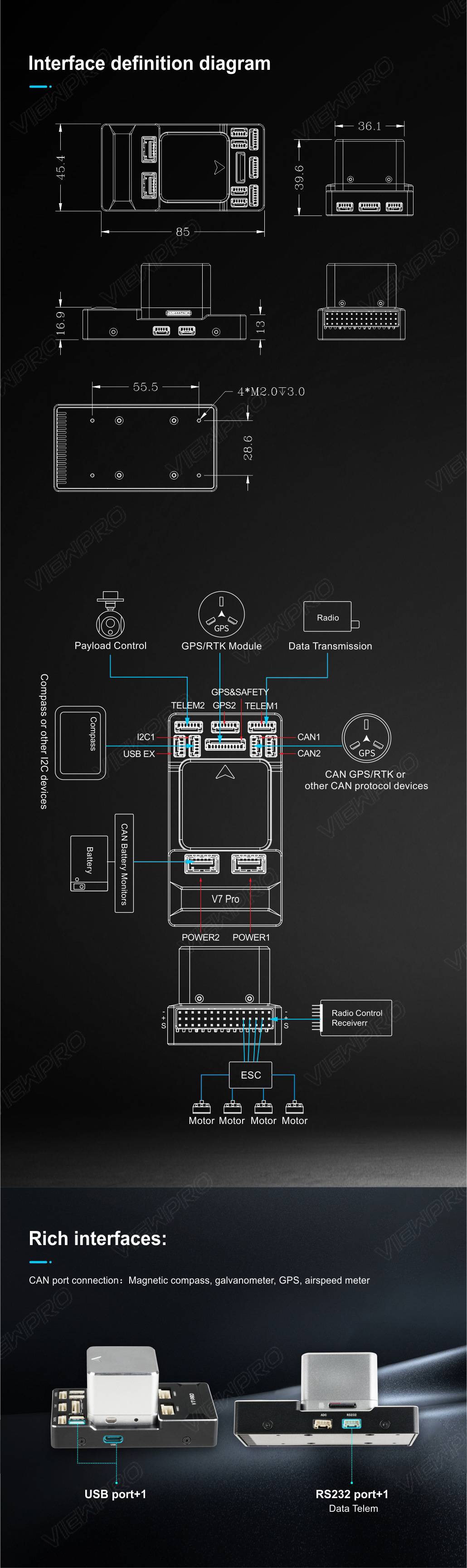
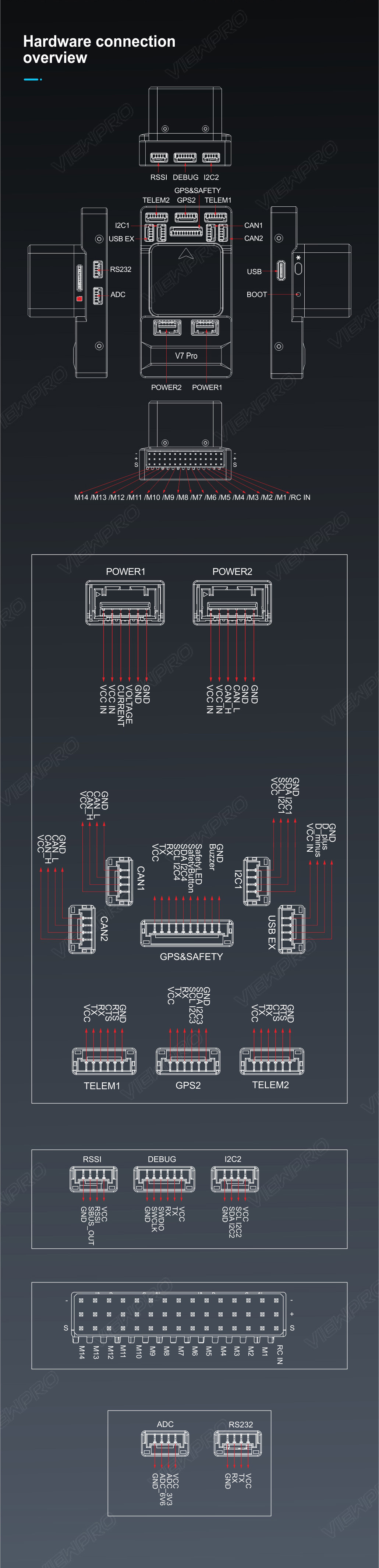
Interfaces |
|
|
Port série UART |
6 |
|
12C |
4 |
|
PWM Oentrée |
14 |
|
RCIN |
1(support PPM/SBUS/DSM) |
|
RSSI |
1 |
|
Sortie SBUS |
1 |
|
CAN |
2 |
|
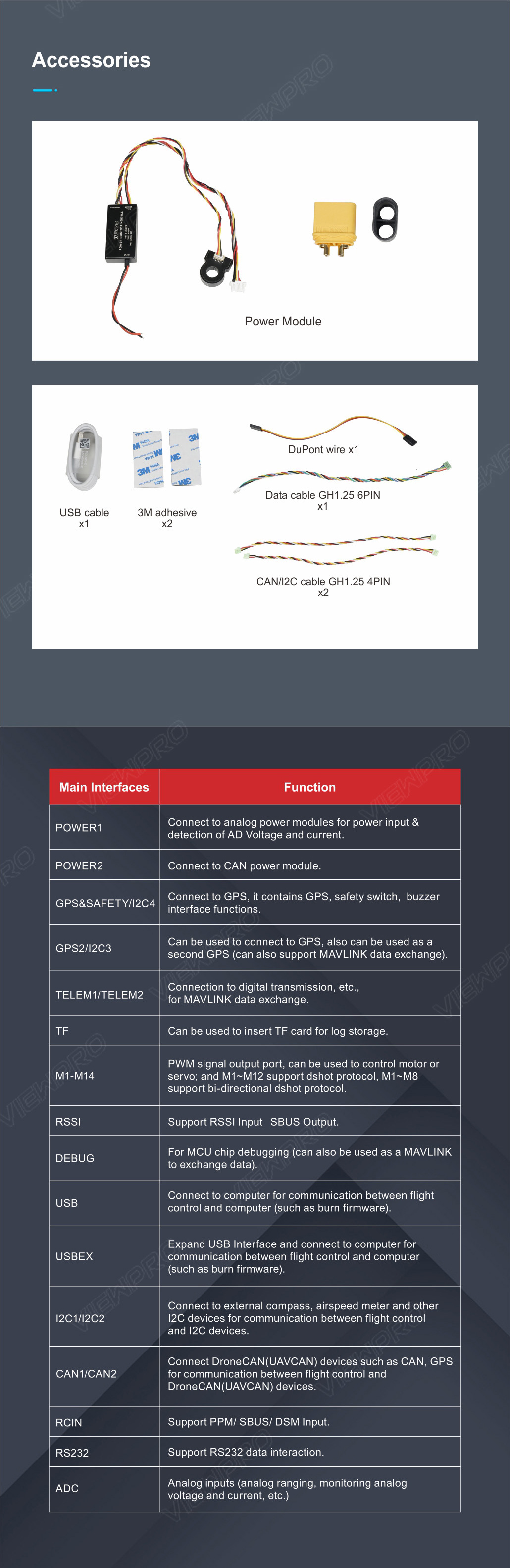
Entrée d'alimentation |
2 ("POWER 1" est l'interface commune de détection de l'alimentation de l'ADC ; "POWER 2" est l'interface d'alimentation CAN) |
|
Interface GPS |
2 |
|
CDA |
2 |
|
RS232 |
1 |
|
DEBUG |
1 |
|
JATG |
1 |
|
Interface USB |
1 |
|
Interface d'extension USB |
1 |
|
Fente pour carte SD |
1 |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “High-level Autopilot / Flight Control V7 Pro for UAV USV UGV”
Vous devez être connecté pour publier un avis.
Produits similaires




Contrôleur de vol, GPS et RTK
TS-2 Antenne d'amélioration singulière Kit de stabilisation du trépied pour Drone GCS


Contrôleur de vol, GPS et RTK
Système de contrôle avionique S1 avec contrôleur de vol et RC en un Interfaces extensibles




Accessoires pour drones
Skyrc D100 V2 Charger Twin-Channel AC/DC LiPo 1-6s For LiPo/ LiFe/ LiIon App Control


Accessoires pour drones
VL5G 5G Infinite Data&Video Transmission System Fluent Anti-interference




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Avis
Il n’y a pas encore d’avis.