
























.jpeg)
| Paramètres du matériel | |
| Tension de fonctionnement | 16V |
| Tension d'entrée | 4S ~ 6S (14,8V~25,2V) |
| Tension de sortie | 5V (connexion avec PWM) |
| Courant dynamique | 850~1500mA @16V |
| Consommation électrique | Average 13.6W , Max 24W |
| Environnement de travail temp. | -20℃ ~ +50℃ |
| Sortie (en option) | IP (RTSP/UDP 720p/1080p 25fps/30fps H264/H265) / SDI (1080P 30fps) |
| Stockage local | TF card (Up to 512G,class 10, FAT32 format) |
| Format de stockage des images sur la carte TF | JPG (1920*1080) |
| Format de stockage vidéo dans la carte TF | MP4 (1080P 30fps) |
| Méthode de contrôle | PWM / TTL / S.BUS / TCP / UDP |
| Spécifications du cardan | |
| Gamme mécanique | Pitch/Tilt: -45°~135° , Yaw/Pan: ±360°*N |
| Gamme contrôlable | Pitch/Tilt: -40°~130° , Yaw/Pan: ±360°*N |
| Angle de vibration | Tangage, roulis et lacet : ±0,02°. |
| Une seule touche pour centrer | √ |
| Spécifications de la caméra EO | |
| Capteur d'image | Capteur CMOS de type STARVIS2 1/2,8 |
| Qualité de l'image | Full HD 1080 (1920*1080) |
| Pixel effectif | 2.13MP |
| Zoom optique de l'objectif | 30x, F=4,3~129mm |
| Zoom numérique | 12x (360x avec le zoom optique) |
| Distance minimale de l'objet | 10 mm (extrémité large) à 1200 mm (extrémité télé) |
| Angle de vue horizontal | 64,0° (extrémité large) ~ 2,4° (extrémité télé) |
| Rapport S/B | plus de 50dB |
| Éclairage minimal | Couleur 0,009 lux (1/30 sec, 50%, mode haute sensibilité activé) |
| Couleur 0,09 lux (1/30 sec, 50%, mode haute sensibilité désactivé) | |
| Contrôle de l'exposition | Auto, manuel, mode prioritaire (priorité à l'obturateur et priorité à l'iris), compensation EV, Slow AE |
| Gain | Auto/Manuel 0dB à 50,0dB (0 à 28 pas) Limite de gain max. 10,7 dB à 50,0 dB (6 à 28 étapes) |
| Balance des blancs | Auto, ATW , Indoor, Outdoor, One Push WB, Manual WB, Outdoor Auto, Sodium Vapor Lamp |
| Vitesse d'obturation | 1/1s à 1/10 000s, 22 étapes |
| Compensation du contre-jour | Marche/Arrêt |
| Réduction du bruit | Marche/Arrêt |
| Image stabilization | Marche/Arrêt |
| Désembuage | Marche/Arrêt |
| Spécifications de l'imageur thermique IR | |
| Longueur de mise au point | 50 mm |
| FOV horizontal | 17.5° |
| FOV vertical | 14.0° |
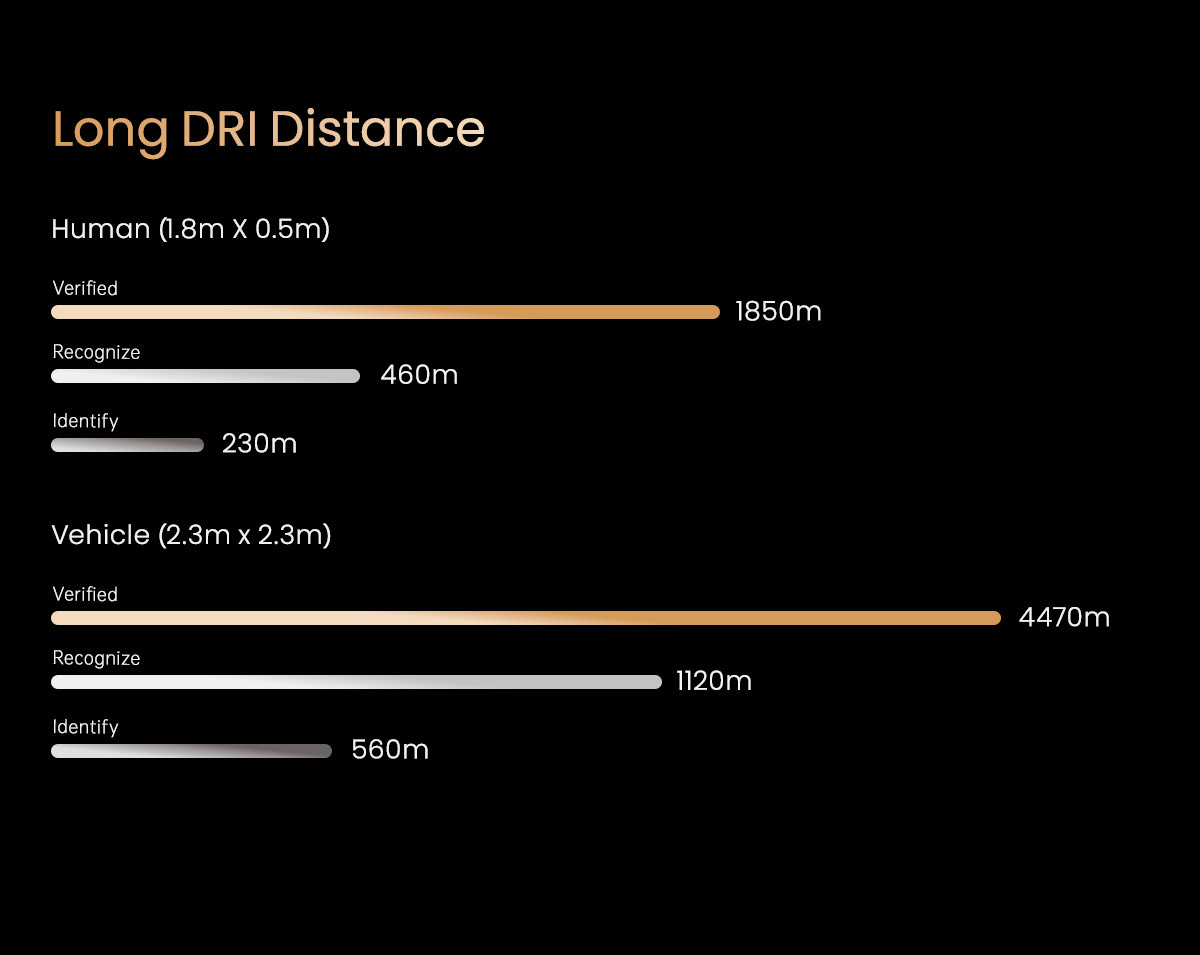
| Distance de détection (homme : 1,8×0,5m) | 2083 mètres |
| Reconnaître la distance (Homme : 1.8×0.5m) | 521 mètres |
| Distance vérifiée (homme : 1,8×0,5m) | 260 mètres |
| Distance de détection (voiture : 4,2×1,8m) | 6389 mètres |
| Reconnaître la distance (voiture : 4,2×1,8m) | 1597 mètres |
| Distance vérifiée (voiture : 4,2×1,8m) | 799 mètres |
| Mode de travail | Imageur thermique à ondes longues (8μm~14μm) non refroidi |
| Pixel du détecteur | 1280*1024 |
| Pas de pixel | 12μm |
| Méthode de mise au point | Lentille primaire athermique |
| NETD | ≤40mK@25℃,F #1.0 |
| MRTD | ≤400mK@25℃,F #1.0 |
| Obturateur | Obturateur bistable |
| Palette de couleurs | Blanc, noir, pseudo-couleur |
| Zoom numérique | 1x ~ 4x |
| Type de thermométrie | Non pris en charge |
| Suivi d'objets par les caméras EO / IR | |
| Taux de mise à jour du pixel de déviation | 50Hz |
| Retard de sortie du pixel de déviation | 5ms |
| Contraste minimal de l'objet | 5% |
| SNR | 4 |
| Taille minimale de l'objet | 32*32 pixels |
| Taille maximale de l'objet | 128*128 pixels |
| Vitesse de suivi | ±48 pixels/image |
| Durée de la mémoire des objets | 100 images (4s) |
| The mean square root values of pulse noise in the object position |
< 0,5 pixel |
| Télémètre laser IR | |
| Capacité de mesure | ≥5km for big target (eg. building) ≥3km for car(2.3m×2.3m ) ≥1.5km for people(1.75m×0.75m ) (Sur la base d'une valeur typique : |
| Précision (valeur typique) | ≤ ±1m (RMS) |
| Longueur d'onde | Laser à impulsion 1535nm |
| Angle divergent | ≤ 0,5mrad |
| Fréquence de mesure | 1~10HZ |
| Plage de mesure minimale | ≤20m |
| Résolution des problèmes de localisation | Latitude et longitude de la cible |
| Ranefinder | Mesurer la distance entre l'objet au centre de l'écran et le télémètre laser. |
| Caractéristiques | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, ranging value, card recording duration, aircraft GPS and altitude or target ranging point GPS and altitude (choose one of them, and t t i i t GPS d ltit d ) d t d ti |
| Géolocalisation | Dairsgpela atni npdo PS co rndin teuin ict r xnif me |
| Lecture de cartes en ligne | Lecture d'images ou de vidéos par SMB / Lecture d'images ou de vidéos par HTTP |
| KLV (UDP) | Enregistrement sur carte ou lecture vidéo Viewlink |
| ArduPilot / PX4 | Prise en charge (protocole Mavlink) Optionnel : Prise en charge de la fonction Follow me d'Ardupilot |
| Assemblage vidéo | EO+IR /IR+EO /EO /IR |
| Sortie double flux vidéo | Non pris en charge (sortie à deux flux EO et IR) |
| Informations sur l'emballage | |
| N.W. | 1625±10g(Viewport version with Viewport) |
| Mesure du produit. | 155*143.5*232.1mm / 155*143.5*237.8mm(Viewport version with Viewport) |
| Accessoires | 1pc gimbal camera device, screws, copper cylinders, damping balls,1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| G.W. | 3352g |
| Mesure de l'emballage. | 350*300*250mm |
| Poids | 1 kg |
|---|
Soyez le premier à laisser votre avis sur “U30TIRM-HD High Definition 1280 lR thermal 30x Optical Zoom Starlight Night Vision Triple Sensors Object Trackingand 5000m LRF Gimbal Camera”
Vous devez être connecté pour publier un avis.
Produits similaires




Cardans et charge utile
€4,499.00


Cardans et charge utile
Q30TIR lite 30x EO + 25mm IR Dual Sensor 3axis Gimbal Camera for UAV
€8,999.00






Cardans et charge utile
Q40TIR Caméra de poursuite 4K à double capteur thermique IR 40x Zoom 50mm haute résolution
€0.00


Cardans et charge utile
€3,749.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cardans et charge utile
VOM-42 - Caméra de cartographie 42MP pour les levés aériens sur de grandes surfaces
€0.00
Avis
Il n’y a pas encore d’avis.