
















| פרמטר חומרה | |
| מתח עבודה | 16V |
| מתח כניסה | 4S ~ 6S |
| מתח יציאה | 5V (חיבור עם PWM) |
| זרם דינמי | 580mA~1900mA @ 16V |
| טמפרטורת סביבת העבודה. | -20℃ ~ +60℃ |
| פלט | מיקרו HDMI (1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps) |
| אחסון מקומי | כרטיס TF (עד 128G, סוג 10, פורמט FAT32 או ex FAT) |
| פורמט אחסון תמונות | JPG (1920*1080) |
| פורמט אחסון וידאו | MP4 (1080P 30fps) |
| קריאת קלפים באינטרנט | HTTP קורא תמונות |
| שיטת בקרה | PWM / TTL / S.BUS / TCP (פלט IP) / UDP (גרסת פלט IP) |
| תיוג גיאוגרפי | תמיכה, זמן תצוגה וקוורדינטות GPS בתמונה exif |
| מפרט גימבל | |
| טווח מכני | Pitch/Tilt: -50°~140°, Roll: ±40°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| טווח שליטה | Pitch/Tilt: -45°~135°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| זווית הרטט | שיפוע/גלגול: ±0.02°, סטייה: ±0.02° |
| מקש אחד למרכז | √ |
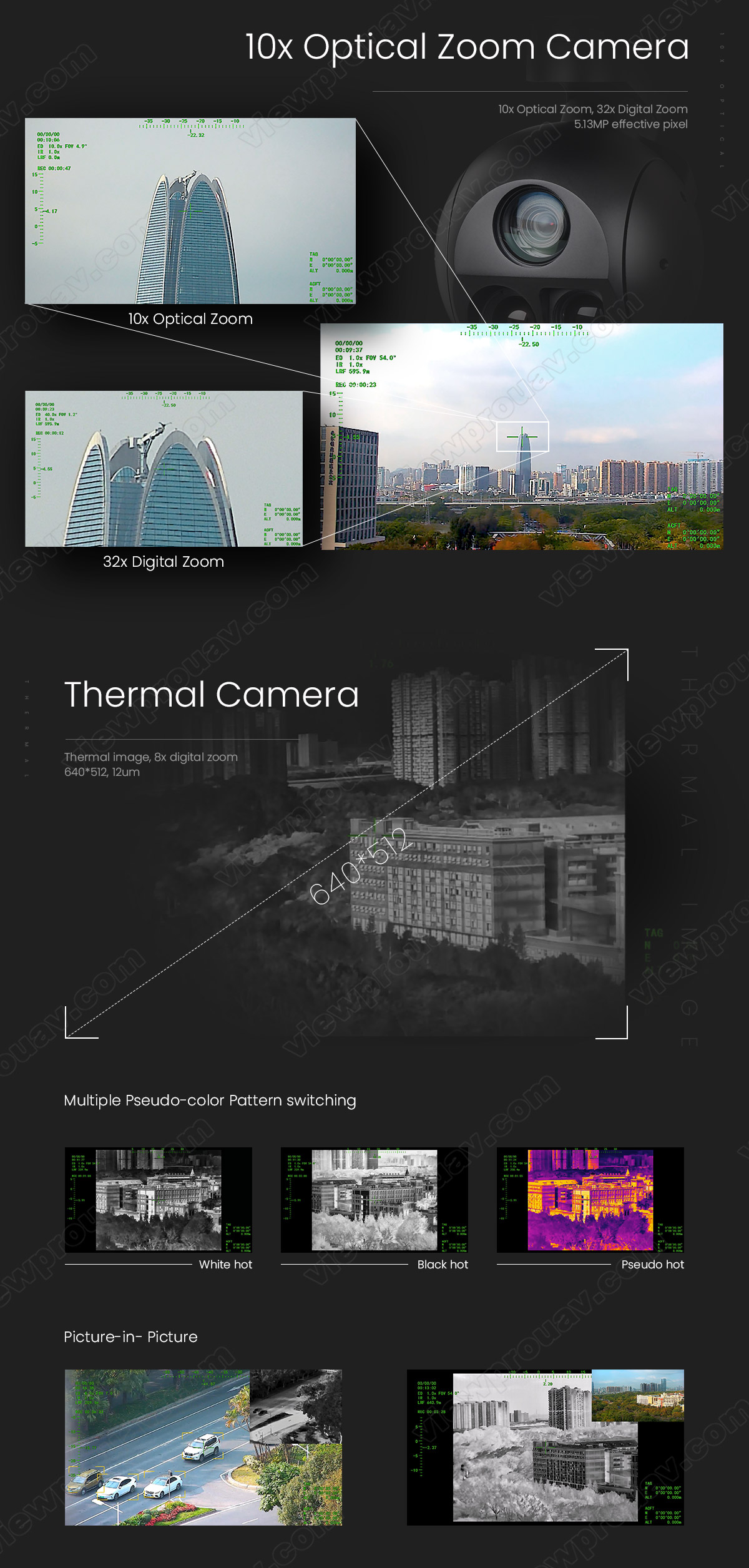
| מפרט מצלמת EO | |
| חיישן הדמיה | 1/3″ Panasonic CMOS Sensor |
| סך כל הפיקסלים | 5.13M |
| איכות תמונה | Full HD 1080 (1920*1080) |
| זום אופטי | 10x, f = 5.1mm ~ 51mm |
| זום דיגיטלי | 32x |
| Angle of View (D, H, V) | D: 68°(Wide end) ~ 6.7° (Tele end) |
| H: 54°(wide end) ~ 4.9°(tele end) | |
| V: 31°(wide end) ~ 4.0°(tele end) | |
| מערכת סנכרון | Progressive Scan |
| Sync. System Internal | פנימי |
| יחס אות לרעש | יותר מ-50dB |
| מינימום תאורה | Color : 0.5 lux , BW : 0.1lux Color DSS : 0.125 lux , BW DSS : 0.025 lux |
| Gain Control (AGC) | Off / On |
| איזון לבן | Auto / One Push / Manual / Indoor / Outdoor |
| מהירות תריס | 1/30(25) ~ 1/30,000 sec |
| פוקוס | Auto / One Push / Manual |
| Iris | 0 ~ 20 steps |
| Exposure | Mode / AGC / Shut Speed / Iris / DSS / Flickerless / Brightness / WDR/BLC / D&N |
| Defog | כן |
| מפרט מצלמת תרמית IR | |
| אורך מוקד | 19 מ"מ |
| סרט ציפוי | DLC |
| שדה ראייה אופקי | 22.9° |
| שדה ראייה אנכי | 18.4° |
| שדה ראייה אלכסוני | 29.0° |
| מרחק זיהוי (גבר: 1.8×0.5 מטר) | 792 מטרים |
| זיהוי מרחק (גבר: 1.8×0.5 מטר) | 198 מטרים |
| מרחק מאומת (גבר: 1.8×0.5 מטר) | 99 מטרים |
| מרחק בלשי (מכונית: 4.2×1.8 מ') | 2428 מטרים |
| זיהוי מרחק (מכונית: 4.2×1.8 מטר) | 607 מטרים |
| מרחק מאומת (מכונית: 4.2×1.8 מטר) | 303 מטרים |
| מצב עבודה | מצלמה תרמית VOx ארוכת גל (8μm~14μm) ללא קירור |
| פיקסל גלאי | 640*512 |
| מרווח פיקסלים | 12 מיקרומטר |
| שיטת מיקוד | עדשה ראשית אטמית |
| NETD | ≤[email protected] @25℃ |
| פלטת צבעים | לבן, אדום ברזל, צבע מדומה |
| זום דיגיטלי | 1x ~ 8x |
| סנכרן את השעה הנכונה | כן |
| מעקב אחר אובייקטים באמצעות מצלמת IR | |
| קצב עדכון של סטיית פיקסל | 30 הרץ |
| עיכוב פלט של פיקסל סטייה | <30 מילי-שניות |
| ניגודיות מינימלית של אובייקטים | 5% |
| SNR | 4 |
| גודל מינימלי של אובייקט | 16*16 פיקסלים |
| גודל אובייקט מרבי | 256*256 פיקסלים |
| מהירות מעקב | ±48 פיקסל/פריים |
| זמן זיכרון אובייקט | 100 פריימים |
| מד טווח לייזר IR | |
| טווח | 5~1500 מטר |
| החלטה | 1:<400±1 2:>400±0.4% |
| קרן אור | לייזר פולס 905 ננומטר |
| זווית סוטה | 3~10 mrad |
| מדידת זמן התגובה | 1:<0.06s/m(≤100) 2:<0.28s/m(≥100~600) 3:<0.85s/m(≥600~1000) 4:<1s/m(≥1000~1500) |
| כוח | 0.5~0.9W |
| פתרון מיקום | קו רוחב וקו אורך של היעד |
| רנפנדר | מדידת מרחק היעד |
| AI Performance | |
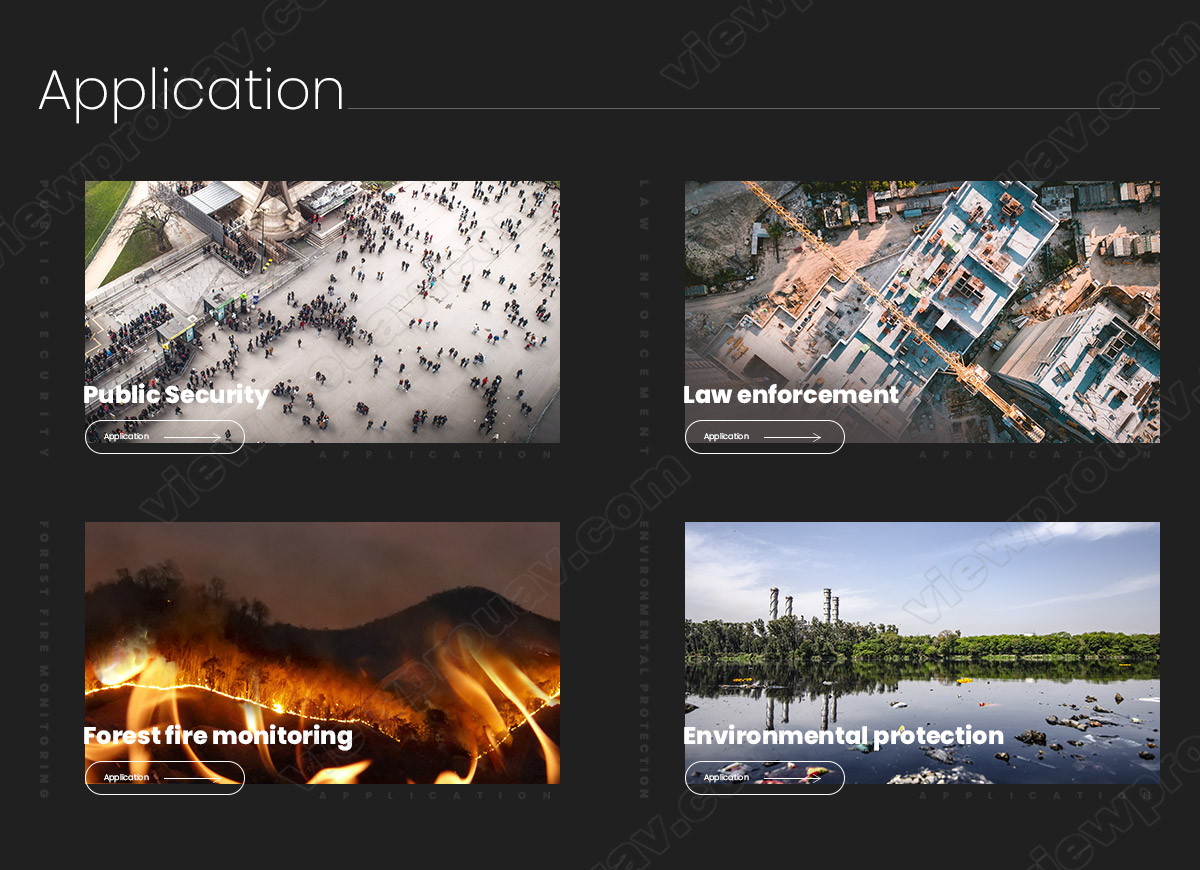
| סוג היעדים | מכונית ואדם |
| כמות זיהוי סימולטני | ≥ 10 יעדים |
| יחס ניגודיות מינימלי | 5% |
| גודל מינימלי | 5×5 פיקסלים |
| שיעור זיהוי מכוניות | ≥85% |
| שיעור אזעקות שווא | ≤10% |
| מידע על אריזה | |
| N.W. | 795g (Viewport version) |
| מידות המוצר. | 114.7*100*178.1mm (Standard version) /114.7*100*183.8mm (Viewport version) |
| אביזרים | 1pc gimbal מצלמה, ברגים, צילינדרים נחושת, כדורי שיכוך, 1pc USB ל-TTL כבל / תיבת פלסטיק באיכות גבוהה עם כרית קצף |
| G.W. | 2194g |
| מידות החבילה. | 350*300*250 מ"מ |
| משקל | 1 ק"ג |
|---|
היה הראשון לכתוב סקירה “A10TR Pro 10x Triple Sensor AI Tracking Camera with 1500m Laser Rangefinder”
עליך להתחבר כדי לפרסם ביקורת.
מוצרים קשורים










גימבלים ומטען
Z40K מצלמת גימבל 4K HD עם זום 25x, גימבל תלת-צירי, צילום אווירי, קרטוגרפיה וסיור פיקוח
€3,749.00






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
€12,449.00
חוות דעת
אין עדיין חוות דעת.