









Stabilizing the Mini Z10TIRM is a highly optimized 3-axis camera gimbal with pinpoint-precise motor rotation with a control accuracy of ±0.01° powered by a dedicated processor. Mini Z10TIRM uses a unique mechanically limited design and concealed wires to ensure more stable data transmission and greater durability. Vibration is eliminated using four damping balls and a lightweight damping board, creating seamlessly smooth video. 360°rotation remains possible through gimbal rotation. Stable, smooth footage image can be captured even when flying at high speed flight.

מצלמה עם זום אופטי 10x
Powered by 1/3″ CMOS module,the camera has 4.08 Mega valid pixels, supports 10 times optical focus FHD 1080P video. Designed according to the characteristics of aerial photography application. Fast auto-focus, multi functional, small size, and support TCP and TTL serial control.

IR+EO Dual Sensors Object Tracking
Build-in normalization, cross-correlation and tracking algorithm, combining with object missing recapture algorithm, achieve stable track of the target. Support custom characters of user OSD, adaptive gate, cross cursor, trace information display. The tracking speed is up to 48pixel/frame, object size range is from 32*32 pixel to 128*128 pixel, with the minimal signal-to-noise ratio (SNR) 4db, the mean square root values of pulse noise in the object position < 0.5 pixel, which greatly improve the accuracy and tracking effect.

GPS Location Resolving
The advanced location calculating algorithm is used to calculate the distance of the object within 1500 meters, accurately analyze the longitude and latitude of the object, and display the on the screen. It has a great auxiliary role in the enforcement of military and police.

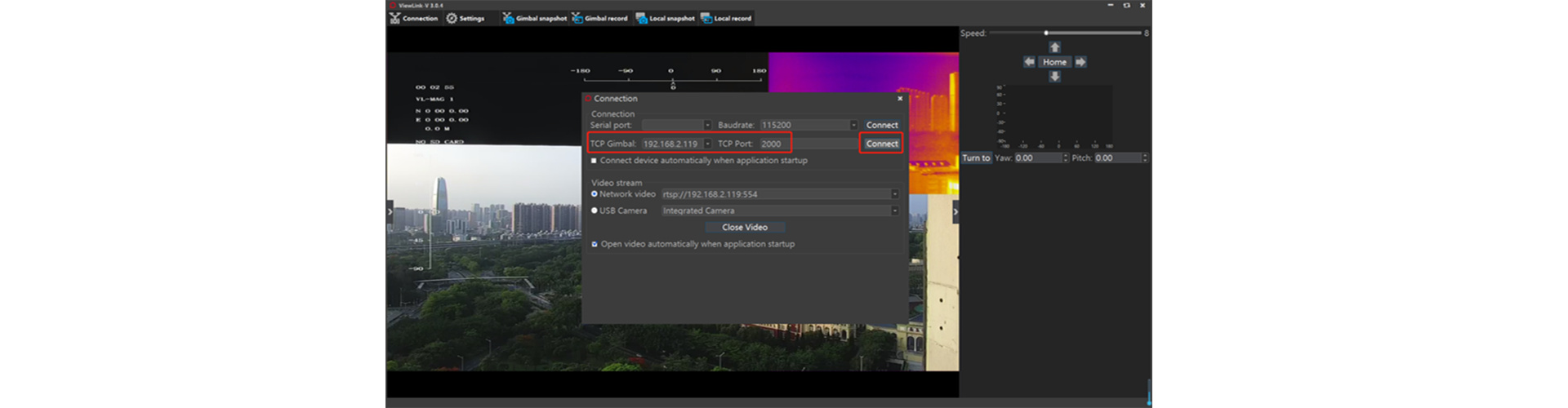
Output Methods and Control
Mini Z10TIRM supports both Ethernet/IP output. Ethernet output default as 1080P and record is 1080p. It will support 360 degree endless pan. With Viewpro software Viewlink you can fulfill IP output, TTL control. PWM/S.BUS/UDP control is optional, please contact viewpro for special request.
יישום
אספקה בעיקר בתחום אכיפת החוק, כיבוי אש, בדיקת מגדלי חשמל וצינורות, חיפוש והצלה וכו'. במצבי חירום נדרש מגוון רחב של אמצעי ניטור וחיפוש כדי להעביר את המצב במהירות, לשפר את יעילות התגובה ולהפחית את מספר הנפגעים.

| פרמטר חומרה | |
| מתח עבודה | 16V |
| מתח כניסה | 4S ~ 6S |
| מתח יציאה | 5V (חיבור עם PWM) |
| זרם דינמי | 570~2000mA @ 16V |
| טמפרטורת סביבת העבודה. | -20℃ ~ +60℃ |
| פלט | מיקרו HDMI (1080P 60fps) / IP (RTSP/UDP 720p/1080p 25fps/30fps) / SDI (1080P 30fps) |
| אחסון מקומי | TF card (Up to 512G, class 10, FAT32) |
| פורמט אחסון תמונות | JPG (1920*1080) |
| פורמט אחסון וידאו | MP4 (1080P 30fps) |
| קריאת קלפים באינטרנט | קריאת SMB / קריאת HTTP |
| שיטת בקרה | PWM / TTL / S.BUS/ TCP (IP output version) / UDP(IP output version) |
| תיוג גיאוגרפי | תמיכה, זמן תצוגה וקוורדינטות GPS בתמונה exif |
| מפרט גימבל | |
| טווח מכני | Pitch/Tilt: -33°~113°, Roll: ±40°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| טווח שליטה | Pitch/Tilt: -30°~110°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| זווית הרטט | שיפוע/גלגול: ±0.02°, סטייה: ±0.02° |
| מקש אחד למרכז | √ |
| מפרט מצלמת EO | |
| חיישן הדמיה | 1/3-type CMOS(Progressive Scan) |
| איכות תמונה | Full HD 1080 (1920*1080) |
| פיקסל אפקטיבי | 4.08 מגה-פיקסל |
| זום אופטי של העדשה | 10x, F=3.3~33.0mm, F1.8~3.4 |
| זום דיגיטלי | 16x |
| מרחק מינימלי מהאובייקט | 10mm(wide end) to 800mm(tele end) |
| זווית צפייה אופקית | 58.2°(wide end) ~ 6.9°(tele end) |
| מערכת סנכרון | פנימי |
| יחס אות לרעש | יותר מ-50dB |
| מינימום תאורה | 0.5 lx (1/30s, F1.8, 50%) |
| רווח | Auto / Manual |
| איזון לבן | ATW1 (Narrow), ATW2 (Wide), One push, manual (B, R),indoor,outdoor |
| מהירות תריס | 1/1s to 1/10,000s |
| פיצוי תאורה אחורית | כן |
| בקרת צמצם | 16 שלבים |
| OSD | כן |
| IR Thermal imager spec | |
| אורך מוקד | 24mm |
| שדה ראייה אופקי | 18.2° |
| שדה ראייה אנכי | 14.6° |
| שדה ראייה אלכסוני | 23.2° |
| מרחק זיהוי (גבר: 1.8×0.5 מטר) | 1000 meters |
| זיהוי מרחק (גבר: 1.8×0.5 מטר) | 250 meters |
| מרחק מאומת (גבר: 1.8×0.5 מטר) | 125 meters |
| מרחק בלשי (מכונית: 4.2×1.8 מ') | 3067 meters |
| זיהוי מרחק (מכונית: 4.2×1.8 מטר) | 767 meters |
| מרחק מאומת (מכונית: 4.2×1.8 מטר) | 383 meters |
| מצב עבודה | מצלמה תרמית ללא קירור לגלים ארוכים (8μm~14μm) |
| פיקסל גלאי | 640*512 |
| מרווח פיקסלים | 12 מיקרומטר |
| שיטת מיקוד | עדשה ראשית אטמית |
| תיקון מקדם פליטה | 0.01~1 |
| NETD | ≤50mK (ב-25℃) |
| MRTD | ≤650mK (בתדר אופייני) |
| שיפור תמונה | התאמה אוטומטית של בהירות התמונה ויחס הניגודיות |
| פלטת צבעים | לבן, אדום ברזל, צבע מדומה |
| תיקון אוטומטי לא אחיד | כן (ללא תריס) |
| זום דיגיטלי | 1x ~ 12x |
| סנכרן את השעה הנכונה | כן |
| מעקב אחר אובייקטים באמצעות מצלמת EO/IR | |
| קצב עדכון של סטיית פיקסל | 50 הרץ |
| עיכוב פלט של פיקסל סטייה | 5 מילי-שניות |
| ניגודיות מינימלית של אובייקטים | 5% |
| SNR | 4 |
| גודל מינימלי של אובייקט | 32*32 פיקסלים |
| גודל אובייקט מרבי | 128*128 פיקסלים |
| מהירות מעקב | ±48 פיקסל/פריים |
| זמן זיכרון אובייקט | 100 פריימים (4 שניות) |
| ערכי השורש הריבועי הממוצע של רעש הדופק במיקום האובייקט | < 0.5 פיקסל |
| מד טווח לייזר IR | |
| טווח | 5~1800 meters |
| החלטה | 0.5m |
| Working current: | 80mA (max) |
| קרן אור | לייזר פולס 905 ננומטר |
| זווית סוטה | 3 mrad |
| תדירות פולסי הלייזר | 1HZ |
| כוח | < 1 mW (safe for eye) |
| Ranging mode | Pulse |
| פתרון מיקום | קו רוחב וקו אורך של היעד |
| רנפנדר | מדידת מרחק היעד |
| מידע על אריזה | |
| N.W. | 692g(Viewport version) |
| מידות המוצר. | 119.4*105.7*168.1mm / 119.4*105.7*173.8mm(Viewport version) |
| אביזרים | 1pc gimbal camera device, screws, copper cylinders, damping balls, damping boards, TTL cable / Hight quality plastic box with foam cushion |
| G.W. | 2264g |
| מידות החבילה. | 300*250*200 מ"מ |
| משקל | 1 ק"ג |
|---|
היה הראשון לכתוב סקירה “Mini Z10TIRM Dual-sensor Object GPS Coordinate Resolving and LRF Gimbal Camera”
עליך להתחבר כדי לפרסם ביקורת.
מוצרים קשורים










גימבלים ומטען
VO305 UH הגדרה מצלמה אלכסונית תלת-ממדית מיפוי אווירי וסקרים באמצעות כלי טיס בלתי מאוישים


גימבלים ומטען
ZIR1352T תוכנת FOC מקצועית בעלת 3 צירים ודיוק גבוה עם מצלמת זום תרמית כפולה ברזולוציה גבוהה


גימבלים ומטען
Z40K מצלמת גימבל 4K HD עם זום 25x, גימבל תלת-צירי, צילום אווירי, קרטוגרפיה וסיור פיקוח


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
חוות דעת
אין עדיין חוות דעת.