




















| Hardware Parameter | |
| Working voltage | 12V |
| Input voltage | 4S ~ 6S |
| Output voltage | 5V (connect with PWM) |
| Dynamic current | 500mA @ 12V |
| Idle current | 400mA @ 12V |
| Power consumption | ≤ 6W |
| Working environment temp. | -20℃ ~ +60℃ |
| Output | micro HDMI(HD output 1080P 60fps) / IP / SDI |
| Local-storage | SD card (Up to 128G, class 10, FAT32 or ex FAT format), 128G*2 |
| Control method | PWM / TTL / SBUS / TCP(IP output) |
| Gimbal Spec | |
| Pitch/Tilt | ±90° |
| Roll | ±85° |
| Yaw/Pan | ±170° / ±360°*N (IP/SDI output) |
| Vibration angle | Pitch/Roll: ±0.01°, Yaw:±0.01° |
| One-key to center | √ |
| Camera Spec | |
| Imager Sensor | Panasonic 1/2.3inch CMOS |
| Lens | F1.8~F3.6(f=4.08~81.6mm) |
| Zoom | Optical zoom:20x, iA zoom:25x(4k) / 40x(FHD) |
| Total pixel | 25.9MP |
| Record effective pixel | 4k:8.29MP / FHD:6.10MP(16:9) |
| Picture effective pixel | 25.9MP(4:3) |
| Optical Image Stabilization | 5 axis Optical Image Stabilization |
| Record format | MPEG-4 |
| Record pixel | 4k:3840*2160/30p FHD:1080/60p (HD:720/30p) |
| Record shutter speed(Manual) | 1/30 ~ 1/8000 |
| Picture format | JPEG |
| Picture pixel | 20.4M(4:3) |
| Picture shutter speed(Manual) | 1/2 ~ 1/2000 |
| Dynamic range | 65dB |
| Min object distance | 1.5M |
| Viewing angle | Horizontal: 62.95°(Wide end) ~ 3.45°(Tele end); Vertical: 38.00°(wide end) ~ 1.94°(tele end) |
| Sync system | Progressive scanning |
| Local video | 1080P 30fps local TF card |
| HD output | 1080P/720/480P 60fps HDMI1.4 |
| S/N ratio | 38dB |
| Min illumination | Color [email protected] |
| Backlight compensation | Backlight compensation/strong light inhibition |
| Gain | Auto |
| White balance | Auto/Manual |
| Focus | Auto/Manual/One-time automatic focus |
| Focus speed | 2s |
| Lens initialization | Built-in |
| User presetting bit | 20 sets |
| Image rotation | 180°, Horizontal/Vertical mirror image |
| Facial recognition | √ |
| IR Thermal Imager Spec | |
| Focus Length | 50mm |
| Horizontal FOV(°) | 12.4 |
| Vertical FOV(°) | 9.3 |
| Diagonal FOV(°) | 15.5 |
| Detective Distance (Man: 1.8×0.5m) | 1471 meters |
| Recognize Distance (Man: 1.8×0.5m) | 368 meters |
| Verified Distance (Man: 1.8×0.5m) | 184 meters |
| Detective Distance (Car: 4.2×1.8m) | 4510 meters |
| Recognize Distance (Car: 4.2×1.8m) | 1127 meters |
| Verified Distance (Car: 4.2×1.8m) | 564 meters |
| Working mode | Uncooled long wave (8μm~14μm) thermal imager |
| Detector pixel | 640*480 |
| Pixel pitch | 17μm |
| Focusing method | Athermal prime lens |
| Emissivity correction | 0.01~1 |
| NETD | ≤50mK (@25℃) |
| MRTD | ≤650mK (@characteristic frequency) |
| Image enhancement | Auto adjust image brightness and contrast ratio |
| Color palette | White, iron red, pseudo color |
| Auto Non-uniform correction | Yes (no shutter) |
| Digital zoom | 1x, 3x |
| Sync correct time | Yes |
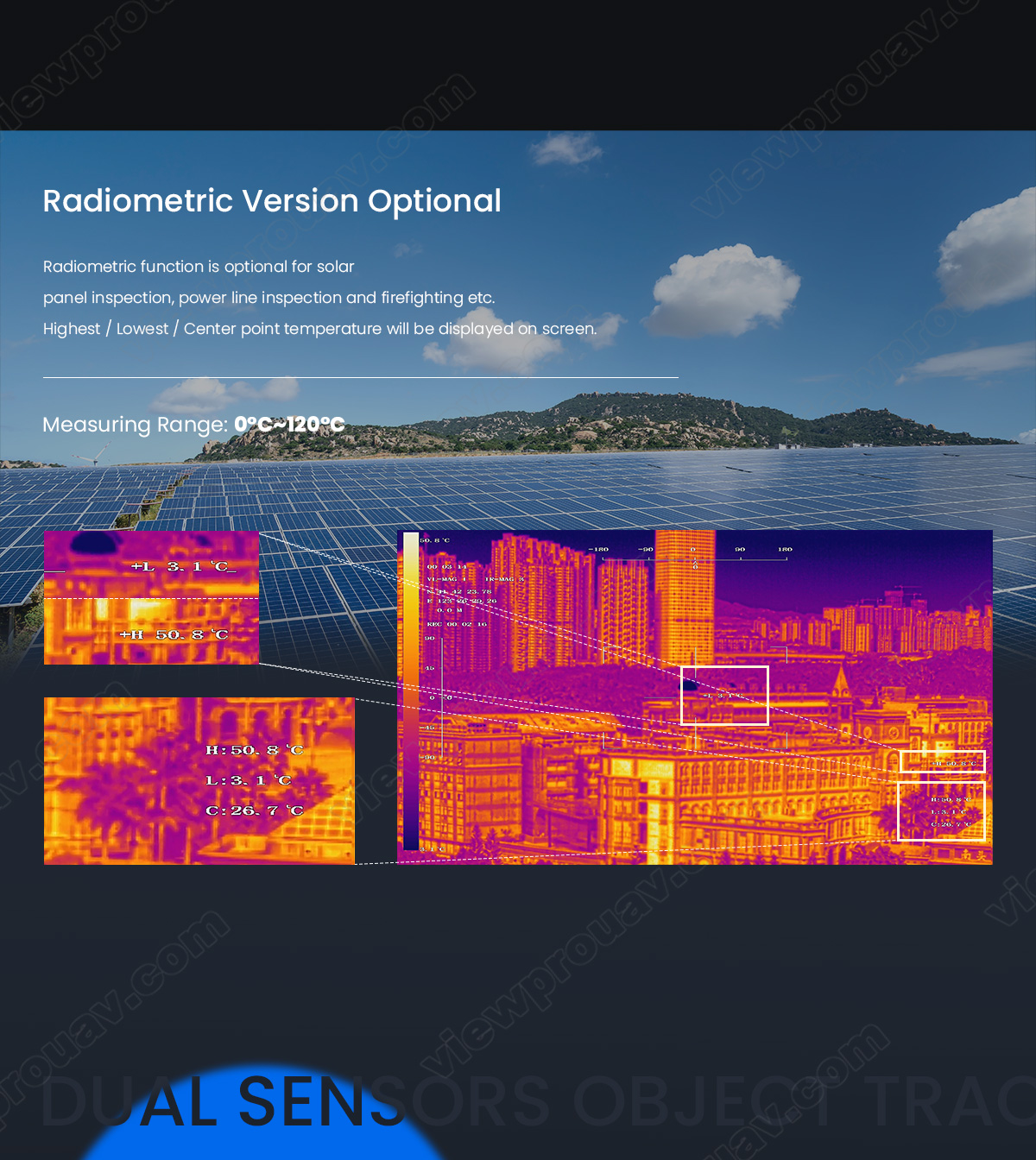
| Thermometry type | Temperature bar (psudo color display) max temp, min temp, FOV center temp (Optional) |
| Temperature warning | 0℃~100℃ |
| EO / IR Camera Object Tracking | |
| Update rate of deviation pixel | 50Hz |
| Output delay of deviation pixel | <5ms |
| Minimum object contrast | 5% |
| SNR | 4 |
| Minimum object size | 32*32 pixel |
| Maximum object size | 128*128 pixel |
| Tracking speed | ±48 pixel/frame |
| The mean square root values of pulse noise in the object position | < 0.5 pixel |
| Packing Information | |
| N.W. | 1560g (Viewport version) |
| Product meas. | 175.5*176*218mm |
| Accessories | 1pc gimbal camera device, screws, copper cylinders, damping balls, damping boards, 1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| Package meas. | 360*300*250mm |
| Weight | 1 kg |
|---|
Be the first to review “Q40TIR High Resolution 40x Zoom 50mm IR Thermal Dual-Sensor 4K Tracking Camera”
You must be logged in to post a review.
Related products


Gimbals & Payload
Q30TIRM Pro 30x Zoom EO/IR 3KM High-level Laser Rangefinder Object Tracking Camera
€0.00


Gimbals & Payload
U7DER /U7DE Micro Prime Lens Dual EO/IR Object Tracking Gimbal Camera for Surveillance
€0.00






Gimbals & Payload
Q20KTIR 4K Camera 20x Continuous Optical Zoom EO-IR Dual-sensor Tracking Camera Payload
€17,249.00


€6,199.00


Gimbals & Payload
U2 Ultra Light Weight Micro Prime LensDual EO Sensors FHD 1080P Object Tracking Gimbal Camera
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Gimbals & Payload
€14,999.00
Reviews
There are no reviews yet.