

















| معلمة الجهاز | |
| جهد العمل | 16V |
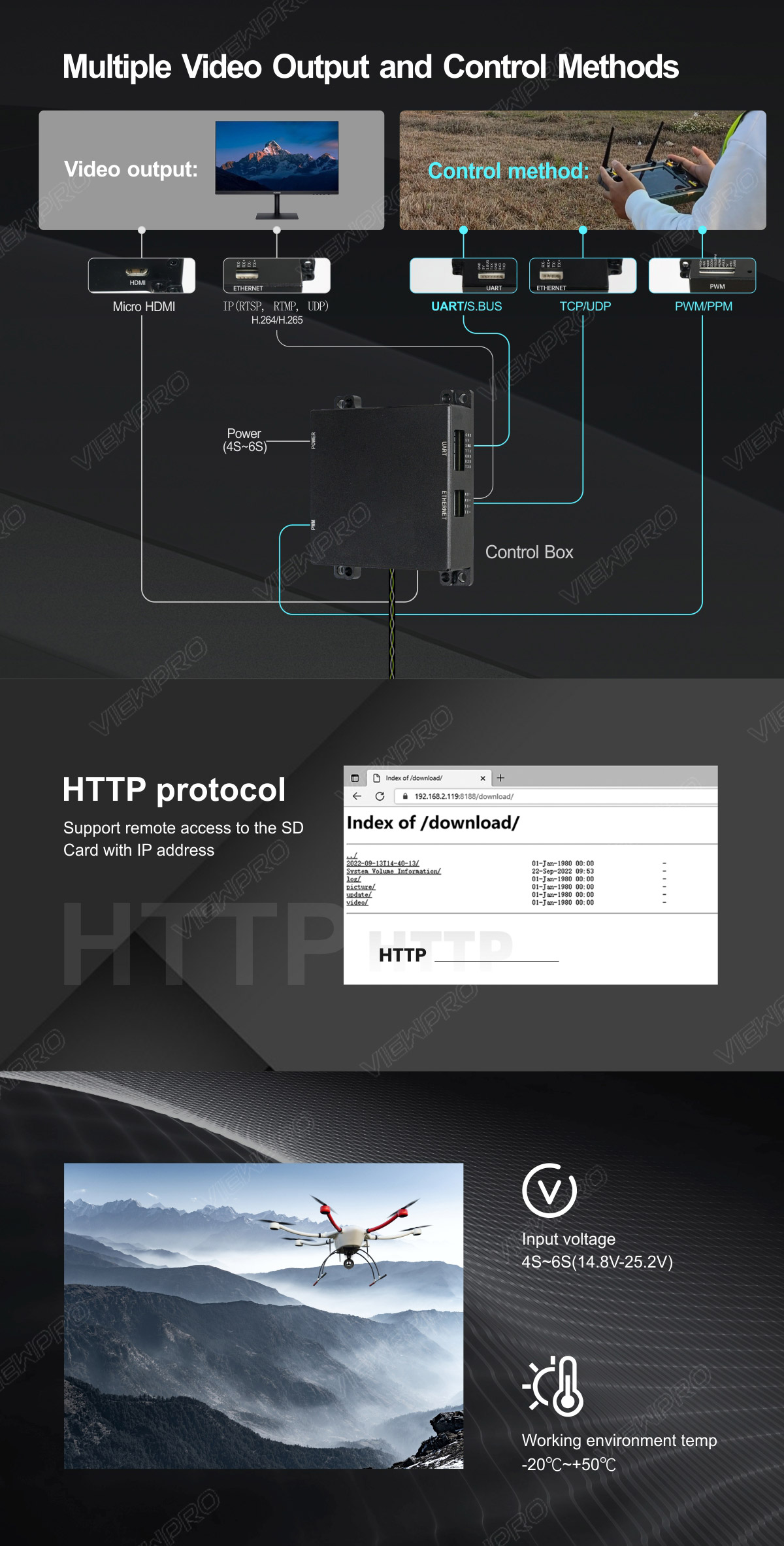
| جهد الإدخال | 4S ~ 6S (14.8V~25.2V) |
| Output voltage | 5V (connect with PWM) |
| Dynamic current | 500~1000mA @ 16V |
| استهلاك الطاقة | Average 8W, Max 16W |
| درجة حرارة بيئة العمل المؤقتة. | -20℃ ~ +50℃ |
| المخرجات | Micro HDMI(1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| التخزين المحلي | TF card (Up to 256G, class 10, FAT32 format) |
| Picture storage format in TF card | JPG(1920*1080) |
| Video storage format in TF card | MP4(1080P 30fps) |
| طريقة التحكم | PWM / TTL / S.BUS / TCP / UDP |
| مواصفات المحرك المحوري | |
| Mechanical Range | Pitch/Tilt: -110°(Up)~130°(Down), Roll: ±40°, Yaw/Pan: ±300° / ±360°*N (IP output version) |
| Controllable Range | Pitch/Tilt: -45°~125°, Yaw/Pan: ±290° / ±360°*N (IP output version) |
| زاوية الاهتزاز | Pitch/Roll/Yaw: ±0.02° |
| مفتاح واحد إلى المركز | √ |
| IR Thermal Imager 1 Spec | |
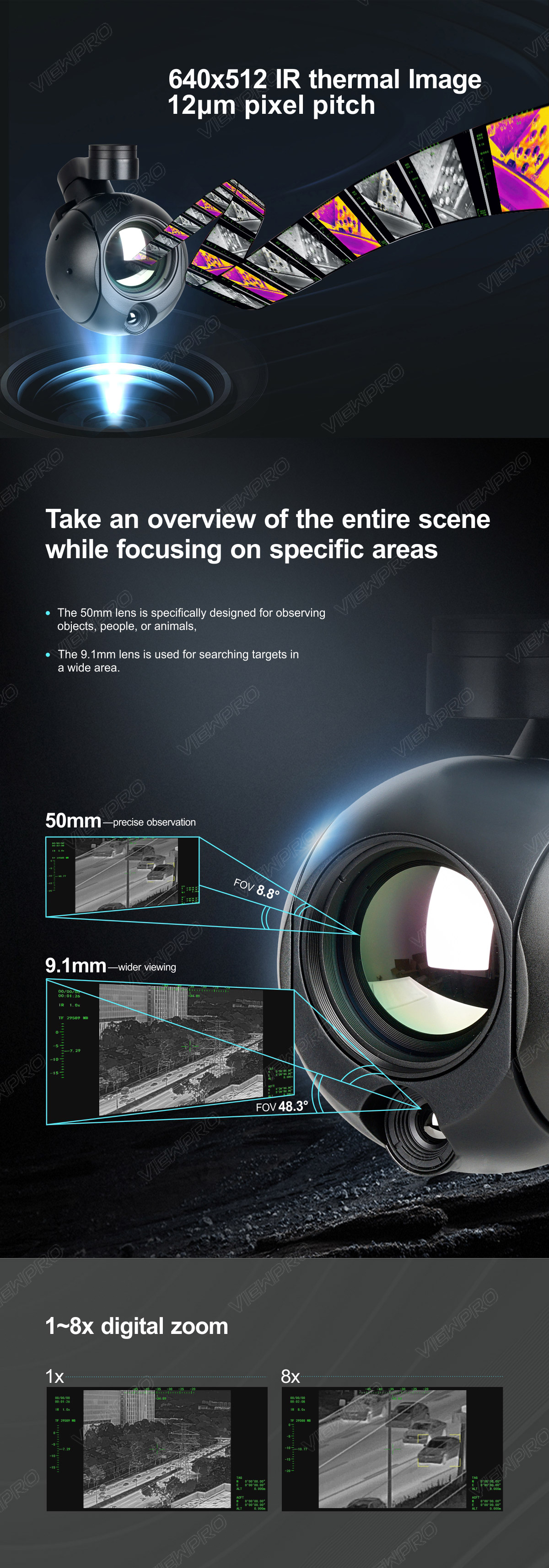
| Focus Length | 50mm |
| Aperture | F1.0 |
| Horizontal FOV | 8.7° |
| Vertical FOV | 7.0° |
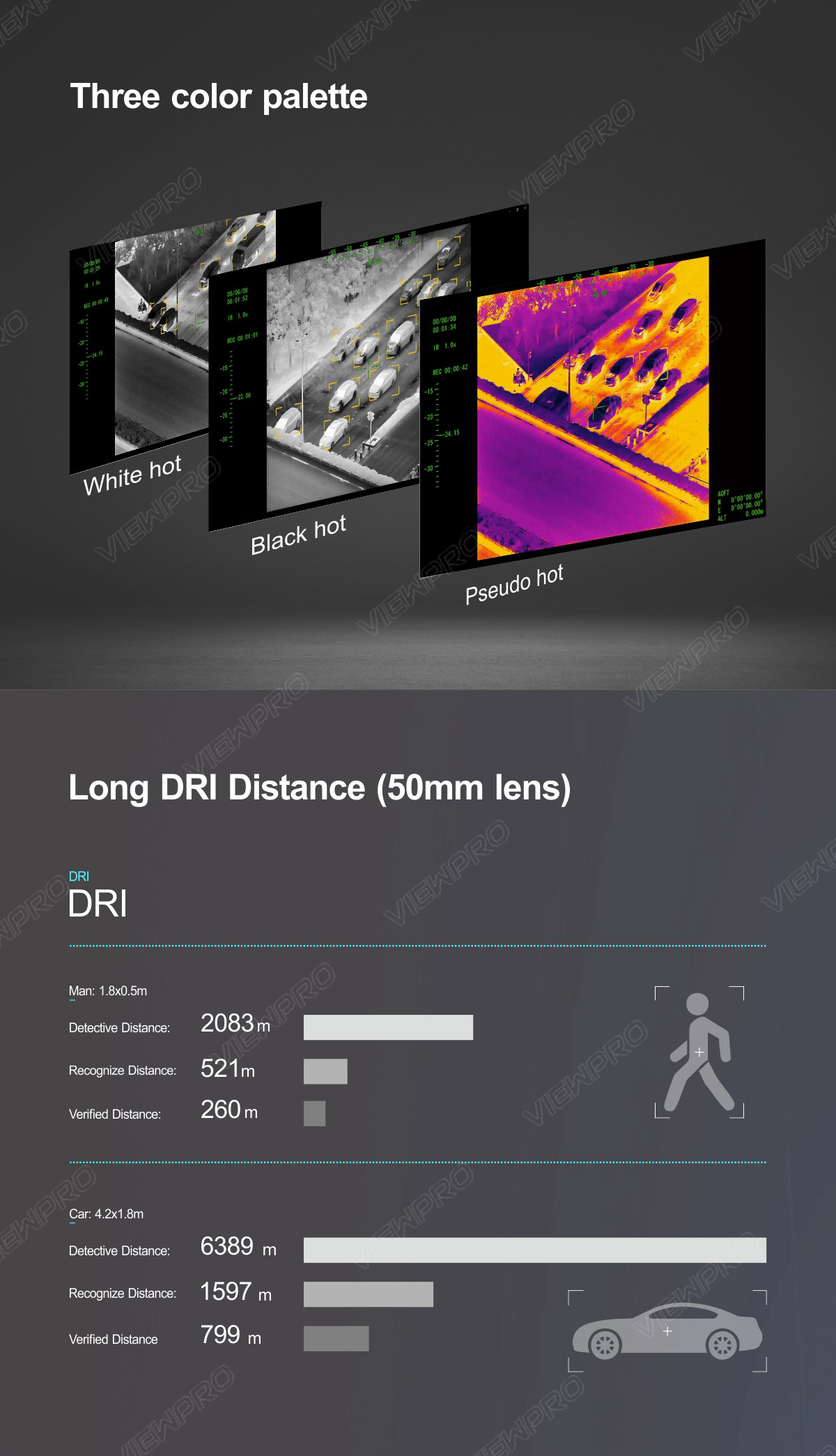
| Detective Distance (Man: 1.8×0.5m) | 2083 meters |
| Recognize Distance (Man: 1.8×0.5m) | 521 meters |
| Verified Distance (Man: 1.8×0.5m) | 260 meters |
| Detective Distance (Car: 4.2×1.8m) | 6389 meters |
| Recognize Distance (Car: 4.2×1.8m) | 1597 meters |
| Verified Distance (Car: 4.2×1.8m) | 799 meters |
| Working mode | Uncooled VOx long wave (8μm~14μm) thermal imager |
| Detector pixel | 640*512 |
| Pixel pitch | 12μm |
| Focusing method | Athermal prime lens |
| NETD | ≤[email protected] @25℃ |
| Color palette | White hot, black hot, pseudo color |
| تقريب رقمي | 1x ~ 8x |
| IR Thermal Imager 2 Spec | |
| Focus Length | 9.1mm |
| Aperture | F1.0 |
| Horizontal FOV | 48.3° |
| Vertical FOV | 38.6° |
| Detective Distance (Man: 1.8×0.5m) | 379 meters |
| Recognize Distance (Man: 1.8×0.5m) | 95 meters |
| Verified Distance (Man: 1.8×0.5m) | 47 meters |
| Detective Distance (Car: 4.2×1.8m) | 1163 meters |
| Recognize Distance (Car: 4.2×1.8m) | 291 meters |
| Verified Distance (Car: 4.2×1.8m) | 145 meters |
| Working mode | Uncooled VOx long wave (8μm~14μm) thermal imager |
| Detector pixel | 640*512 |
| Pixel size | 12μm |
| Focusing method | Athermal prime lens |
| NETD | ≤[email protected] @25℃ |
| Color palette | White hot, black hot, pseudo color |
| IR Camera Object Tracking | |
| معدل تحديث بكسل الانحراف | 30Hz |
| تأخير إخراج بكسل الانحراف | <30ms |
| Minimum object contrast | 5% |
| SNR | 4 |
| الحد الأدنى لحجم الجسم | 16*16 بكسل |
| الحد الأقصى لحجم الجسم | 256*256 pixel |
| سرعة التتبع | ±48 pixel/frame |
| وقت ذاكرة الكائن | 100 frames |
| IR Camera AI Performance | |
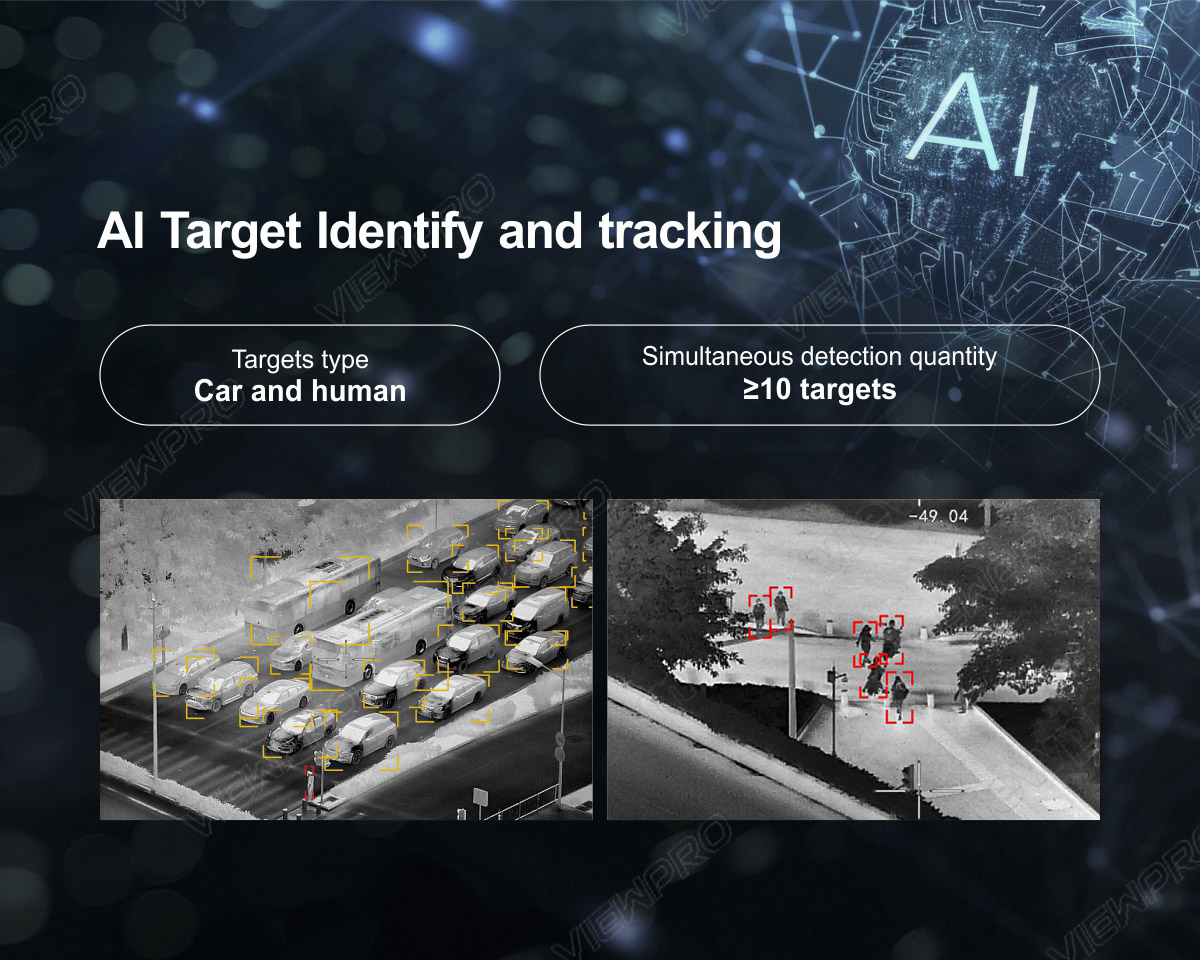
| Targets type | Car and human |
| Simultaneous detection quantity | ≥ 10 targets |
| Min contrast ratio | 5% |
| Min target size | 5×5 pixel |
| Car detection rate | ≥85% |
| False alarm rate | ≤10% |
| Features | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, card recording duration, aircraft GPS and altitude, date and time |
| Geotagging | Display time and GPS coordinate in picture exif |
| Card reading online | HTTP read pictures or videos |
| KLV (UDP) | Card recording or Viewlink video playback |
| ArduPilot / PX4 | Support(Mavlink protocol ) Optional: Support Ardupilot Follow me feature |
| Video stitching | IR1+IR2 / IR2+IR1 / IR1 / IR2 |
| Dual video stream output (optional) | Support( IR1 and IR2 two stream output, notes: unable to record once the dulal video stream output activated) |
| Packing Information | |
| ن.و | 720±10g(Viewport version with Viewport) |
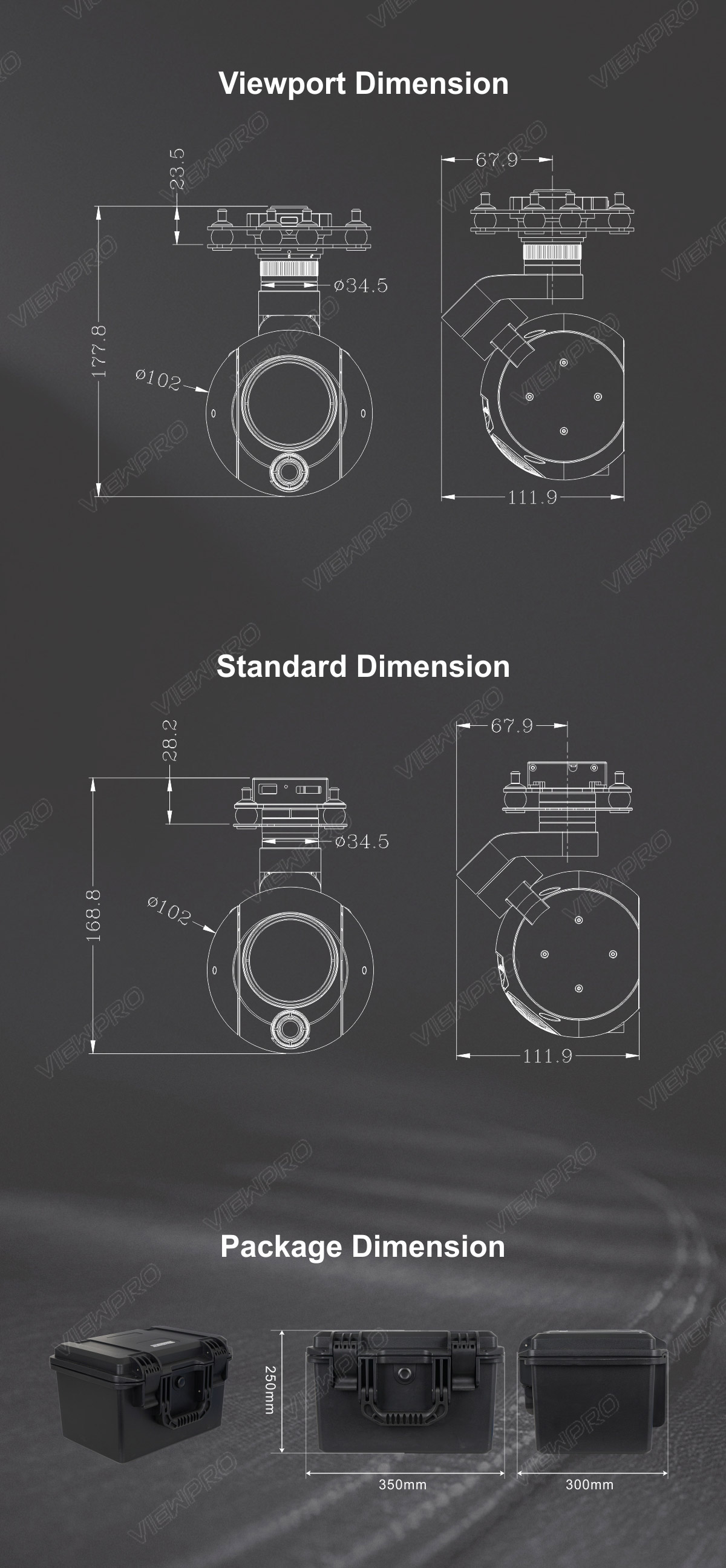
| Product meas. | 114.5*105*171.8mm / 114.5*105*180.8mm (Viewport version with Viewport) |
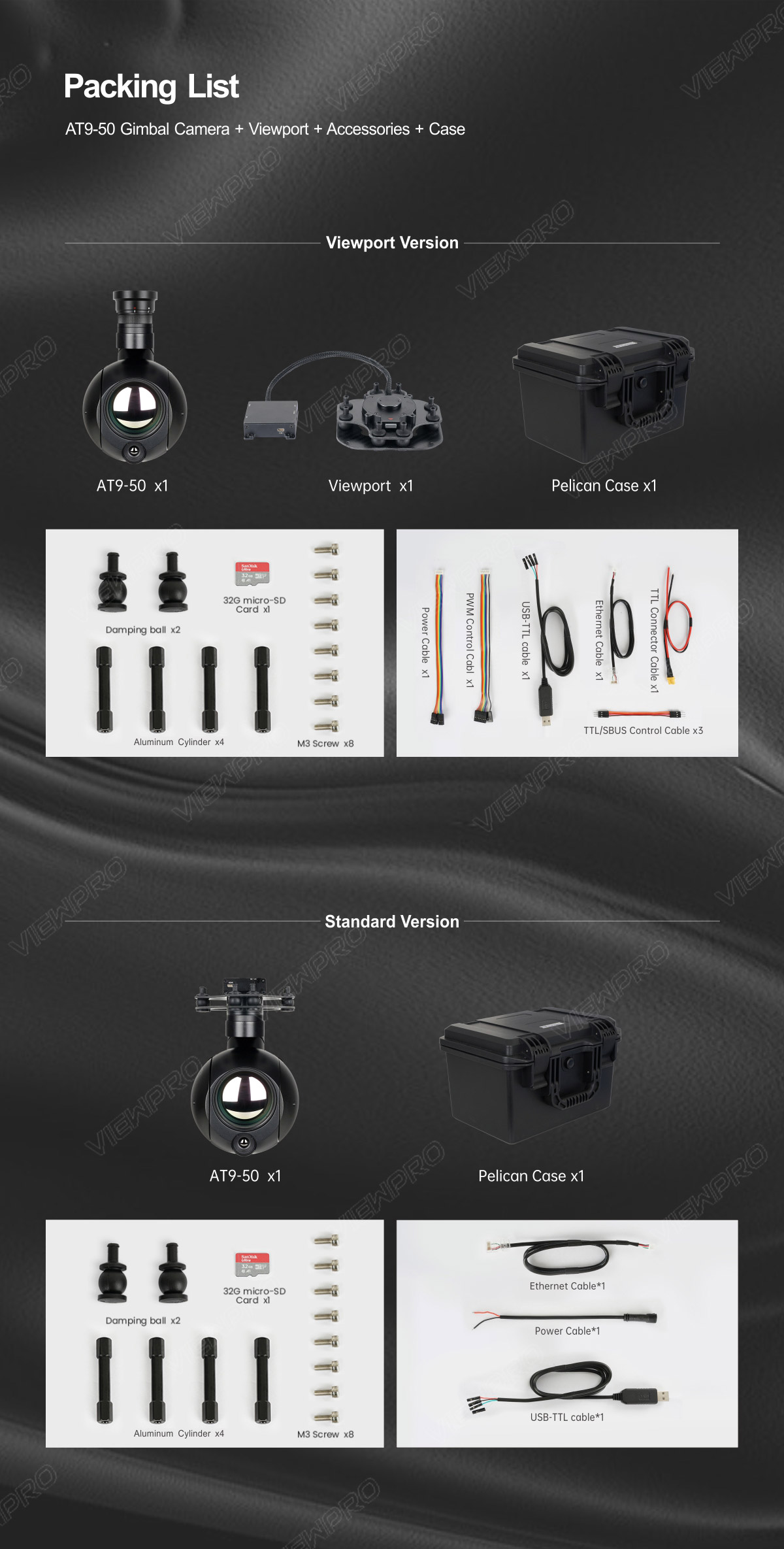
| الإكسسوارات | 1pc gimbal camera device, screws, aluminum cylinders, damping balls, damping boards, 1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| G.W. | 1820g |
| Package meas. | 300*250*200mm |
| الوزن | 1 كيلوجرام |
|---|
كن أول من يقيم “AT9-50 Dual IR 5x Thermal Zoom FOV Flexibility Gimbal Camera”
يجب عليك تسجيل الدخول لنشر مراجعة.
منتجات ذات صلة


المحركات ذات المحورين والحمولة
€0.00


المحركات ذات المحورين والحمولة
كاميرا رسم الخرائط VOM-42 بدقة 42 ميجابكسل للمسح الجوي للمناطق الكبيرة
€0.00


المحركات ذات المحورين والحمولة
€0.00




المحركات ذات المحورين والحمولة
U2 Ultra Light Weight Micro Prime LensDual EO Sensors FHD 1080P Object Tracking Gimbal Camera
€0.00


المحركات ذات المحورين والحمولة
€6,199.00


المحركات ذات المحورين والحمولة
€21,449.00


المحركات ذات المحورين والحمولة
€0.00
المراجعات
لا توجد مراجعات بعد.