
































| Parámetros de hardware | |
| Tensión de trabajo | 16V |
| Tensión de entrada | 4S ~ 6S (14,8V~25,2V) |
| Tensión de salida | 5V (conectar con PWM) |
| Corriente dinámica | 950~1500mA @ 16V |
| Consumo de energía | Media 15,2 W, máxima 24 W |
| Entorno de trabajo temp. | -20℃~ +50℃ |
| Salida | micro HDMI(1080P 30fps/60fps) / IP (RTSP/UDP 4K/1080P/720P 30fps H264/H265) |
| Almacenamiento local | Tarjeta SD (hasta 256 G, clase 10, FAT32) |
| Formato de almacenamiento de imágenes en tarjeta TF | JPG(4K:3840*2160) |
| Formato de almacenamiento de vídeo en tarjeta TF | MP4(4K 30fps) |
| Método de control | PWM / TTL / S.BUS / TCP / UDP |
| Especificaciones del cardán | |
| Gama mecánica | Pitch/Tilt: -125°~115°, Roll: ±70°, Yaw/Pan: ±300° / ±360°*N (versión con salida IP) |
| Alcance controlable | Pitch/Tilt: -45°~110°, Yaw/Pan: ±290° / ±360°*N (versión con salida IP) |
| Ángulo de vibración | Pitch/Roll/Yaw: ±0,02°. |
| Una tecla para centrar | √ |
| Especificaciones de la cámara EO | |
| Sensor de imágenes | SONY 1/2,5″ "Exmor R" CMOS |
| Píxel total | 8,51MP |
| Zoom óptico | 20x, F2,0 a F3,8,f = 4,4 mm (Gran angular), 88,4 mm (Teleobjetivo), hasta 30x con Superresolución |
| Zoom digital | 12x (240x con zoom óptico) |
| Distancia mínima de trabajo | 80 mm (Gran angular), 800 mm (Teleobjetivo) |
| Ángulo de visión | H: 70,2°(Gran angular) ~ 4,1°(Teleobjetivo) V: 43,1°(Gran angular) ~ 2,3°(Teleobjetivo) |
| Enfoque | Auto/Manual |
| Relación S/N | 50 dB |
| Iluminación recomendada | 100 a 100000 lux |
| Iluminación mínima | 1,6 lux (1/30 seg, 50%, ICR desactivado, modo de alta sensibilidad desactivado ) 0,4 lux (1/30 seg, 50%, ICR desactivado, modo de alta sensibilidad activado) 0,21 lux (50%, ICR desactivado, obturador lento 1/4s, alta sensibilidad desactivada) 0,06 lux (50%, ICR desactivado, obturador lento 1/4s, alta sensibilidad activada) |
| Gane | Auto |
| Balance de blancos | Auto/Manual |
| Velocidad de obturación electrónica | 1/1 a 1/10000 seg. |
| Compensación de contraluz | Encendido/Apagado |
| Reducción del ruido | Encendido/Apagado |
| Estabilización de imagen | Encendido/Apagado |
| Desempañar | Encendido/Apagado |
| Especificaciones de la cámara termográfica IR | |
| Longitud de enfoque | 35 mm |
| Película de revestimiento | DLC |
| FOV horizontal | 12.5° |
| FOV vertical | 10.0° |
| FOV diagonal | 16.0° |
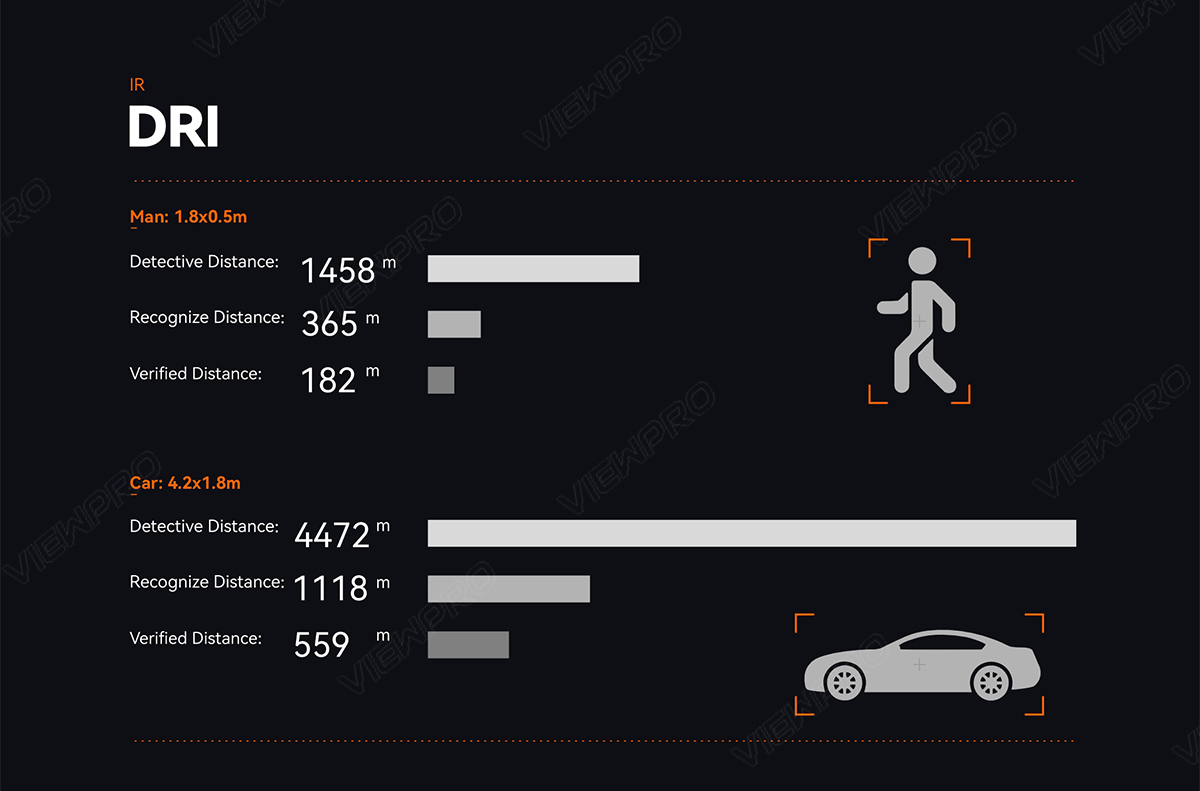
| Distancia de detección (Hombre: 1,8×0,5 m) | 1458 metros |
| Reconocer distancia (Hombre: 1,8×0,5 m) | 365 metros |
| Distancia verificada (Hombre: 1,8×0,5 m) | 182 metros |
| Distancia de detección (coche: 4,2×1,8 m) | 4472 metros |
| Reconocer la distancia (Coche: 4,2×1,8 m) | 1118 metros |
| Distancia verificada (coche: 4,2×1,8 m) | 559 metros |
| Modo de trabajo | Cámara termográfica VOx de onda larga no refrigerada (8μm~14μm) |
| Píxel detector | 640*512 |
| Paso de píxeles | 12μm |
| Método de enfoque | Objetivo de focal fija atérmico |
| NETD | ≤50mK@F1.0 @25℃ |
| Paleta de colores | blanco caliente, negro caliente, pseudo color |
| Zoom digital | 1x ~ 8x |
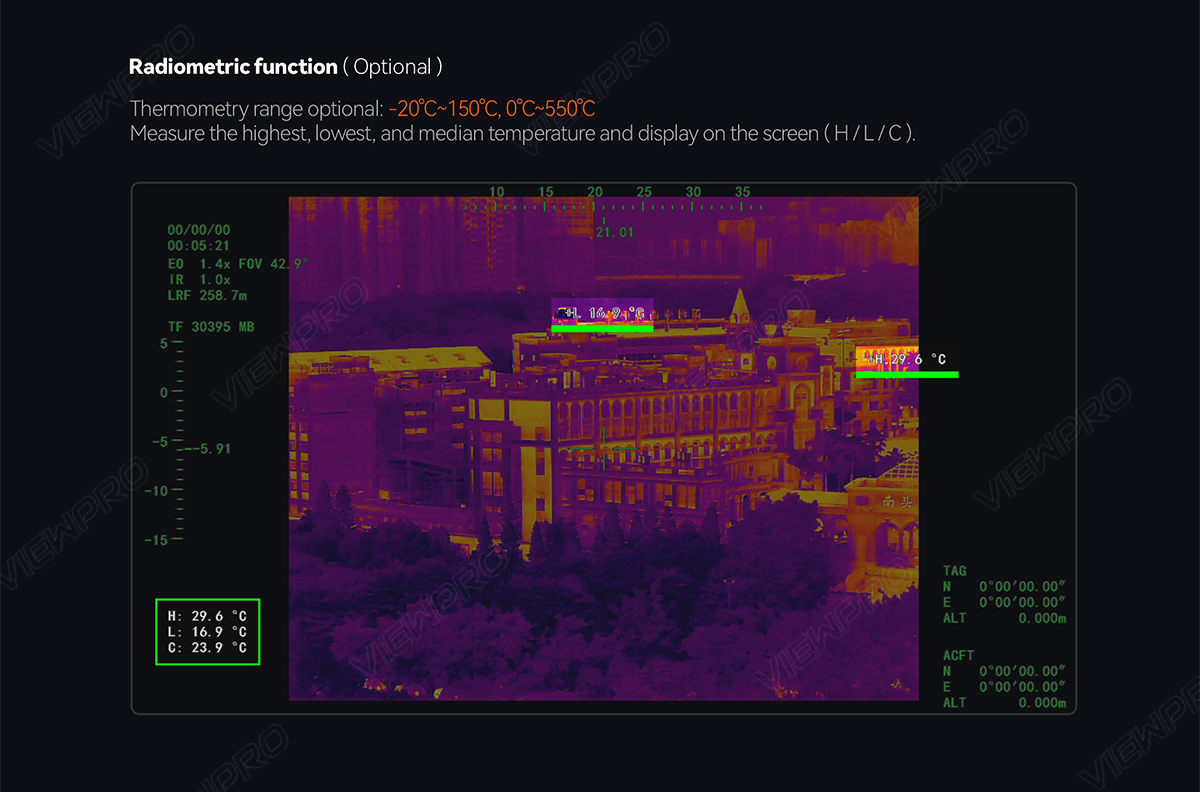
| Función radiométrica (opcional) | Rango de termometría opcional:-20℃~+150℃, 0℃~+550℃ |
| Precisión de termometría: ±3℃o +3%(tomar valor mayor)@23℃±3℃, Rango de termometría 5m | |
| Cámara EO / IR Seguimiento de objetos | |
| Tasa de actualización del píxel de desviación | 30 Hz |
| Retardo de salida del píxel de desviación | <30ms |
| Contraste mínimo del objeto | 5% |
| SNR | 4 |
| Tamaño mínimo del objeto | 16*16 píxeles |
| Tamaño máximo del objeto | 256*256 píxeles |
| Velocidad de seguimiento | ±48 píxeles/fotograma |
| Tiempo de memoria del objeto | 100 cuadros |
| Rendimiento de la IA de la cámara EO | |
| Tipo de objetivos | Coche y humano |
| Cantidad de detección simultánea | ≥ 10 objetivos |
| Relación de contraste mínima | 5% |
| Tamaño mínimo del objetivo | 5×5 píxeles |
| Índice de detección de coches | ≥85% |
| Tasa de falsas alarmas | ≤10% |
| Telémetro láser IR | |
| Gama | para coche ≥ 3000m; para humano ≥ 2000m |
| Alcance mínimo | 15m |
| Frecuencia | 1~10Hz |
| Precisión | ±1m |
| Haz de luz | Láser de pulso de 1535±5nm |
| Ángulo divergente | ~0,6 mrad |
| Localización Resolución | Latitud y longitud del objetivo |
| Telémetro | Medir la distancia entre el objeto en el centro de la pantalla y el telémetro láser |
| Características | |
| OSD | Muestra el ángulo de guiñada y cabeceo del cardán, el aumento, el valor de alcance, la duración de la grabación de la tarjeta, el GPS y la altitud de la aeronave, el GPS y la altitud del punto de alcance del objetivo, la fecha y la hora. |
| Geotagging | Muestra la hora y las coordenadas GPS en la imagen exif |
| Lectura de cartas en línea | HTTP leer imágenes o vídeos |
| KLV (UDP) | Grabación con tarjeta o reproducción de vídeo Viewlink |
| ArduPilot / PX4 | Soporte (protocolo Mavlink) Opcional:Compatible con la función Sígueme de Ardupilot |
| Cosido de vídeo | EO+IR /IR+EO /EO /IR |
| Salida de doble flujo de vídeo (opcional) | Compatibilidad (salida de dos flujos EO e IR, notas: no se puede grabar una vez activada la salida de flujo de vídeo dulal) |
| Información sobre el embalaje | |
| N.O. | 1145±10g(versión con Viewport) |
| Producto meas. | 161*130*205,7mm / 161*130*211,4mm(versión con Viewport) |
| Accesorios | 1 unidad de dispositivo de cámara cardán, tornillos, cable USB a TTL / Caja de alta calidad con almohadilla de espuma |
| G.W. | 2872g |
| Paquete meas. | 350*300*250mm |
| Peso | 1 kg |
|---|
Sé el primero en valorar “A20KTR 4K 20X Optical Zoom Triple Sensors Al Object Tracking Target GPS Coordinate Resolving and 3000m LRF Gimbal Camera”
Debes acceder para publicar una valoración.
Productos relacionados


Cardanes y carga útil
U30TIR 30x Zoom EO+ IR Cámara Gimbal de 2 ejes con sensor dual y seguimiento de objetos
€12,449.00




Cardanes y carga útil
U2 Ultra Ligero Micro Prime LensDual EO Sensores FHD 1080P Seguimiento de Objetos Gimbal Cámara
€0.00




Cardanes y carga útil
€0.00


Cardanes y carga útil
€14,999.00


Cardanes y carga útil
€0.00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Valoraciones
No hay valoraciones aún.