









El Mini Z10TIRM está estabilizado por un cardán de cámara de 3 ejes altamente optimizado con un motor de rotación de precisión milimétrica con una exactitud de control de ±0,01° alimentado por un procesador dedicado. Mini Z10TIRM utiliza un diseño único con limitación mecánica y cables ocultos para garantizar una transmisión de datos más estable y una mayor durabilidad. La vibración se elimina mediante cuatro bolas de amortiguación y una placa de amortiguación ligera, lo que crea un vídeo fluido sin interrupciones. La rotación de 360° sigue siendo posible gracias a la rotación del cardán. Se pueden capturar imágenes estables y fluidas incluso cuando se vuela a gran velocidad.

Cámara con zoom óptico 10x
Alimentado por 1/3″ módulo CMOS,la cámara tiene 4,08 Mega píxeles válidos, soporta 10 veces el enfoque óptico FHD 1080P de vídeo. Diseñado de acuerdo a las características de la aplicación de fotografía aérea. Rápido enfoque automático, multi funcional, tamaño pequeño, y el apoyo TCP y TTL de control en serie.

IR+EO Sensores duales Seguimiento de objetos
Normalización integrada, correlación cruzada y algoritmo de seguimiento, combinados con el algoritmo de recaptura de objetos perdidos, logran un seguimiento estable del objetivo. Soporta caracteres personalizados de OSD de usuario, puerta adaptable, cursor cruzado, visualización de información de rastreo. La velocidad de seguimiento es de hasta 48 píxeles / fotograma, el rango de tamaño del objeto es de 32 * 32 píxeles a 128 * 128 píxeles, con la mínima relación señal-ruido (SNR) 4db, los valores de la raíz cuadrada media de ruido de impulsos en la posición del objeto < 0,5 píxeles, lo que mejora en gran medida la precisión y el efecto de seguimiento.

Resolución de ubicaciones GPS
El algoritmo avanzado de cálculo de localización se utiliza para calcular la distancia del objeto en un radio de 1500 metros, analizar con precisión la longitud y latitud del objeto y mostrarlo en la pantalla. Tiene un gran papel auxiliar en el cumplimiento de las fuerzas militares y policiales.

Métodos de salida y control
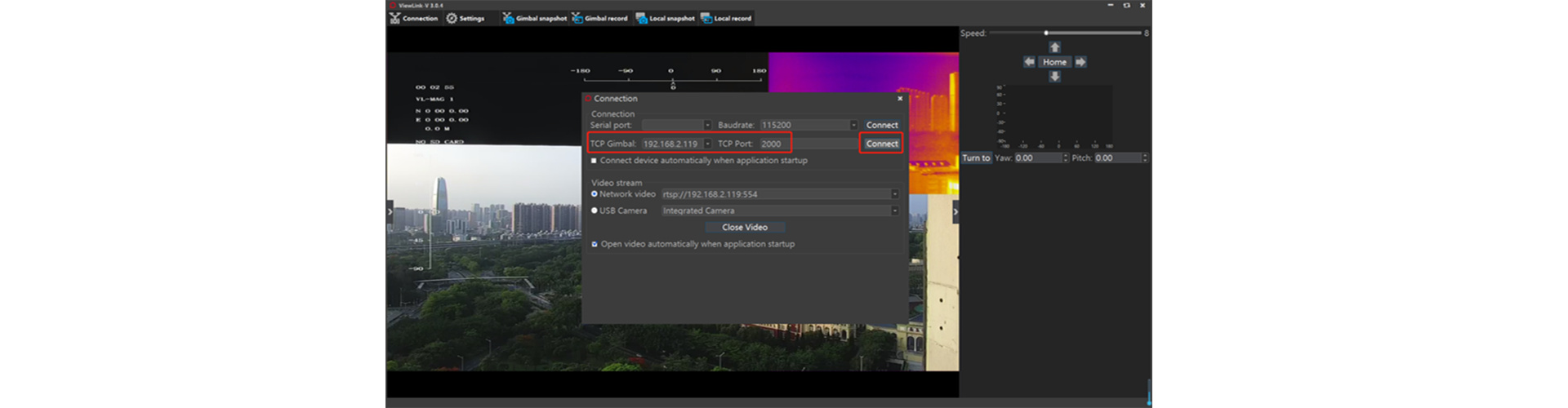
Mini Z10TIRM admite salida Ethernet/IP. La salida Ethernet por defecto es 1080P y la grabación es 1080p. Soporta 360 grados de paneo sin fin. Con el software Viewpro Viewlink puede realizar la salida IP, control TTL. El control PWM/S.BUS/UDP es opcional, por favor contacte con viewpro para peticiones especiales.
Aplicación
Se utilizan principalmente en la aplicación de la ley, la lucha contra incendios, la inspección de torres de alta tensión y tuberías, la búsqueda y el rescate, etc. En caso de emergencia, es necesario disponer de una amplia gama de medios de vigilancia y búsqueda para trasladar rápidamente la situación, mejorar la eficacia de la respuesta y reducir el número de víctimas.

| Parámetros de hardware | |
| Tensión de trabajo | 16V |
| Tensión de entrada | 4S ~ 6S |
| Tensión de salida | 5V (conectar con PWM) |
| Corriente dinámica | 570~2000mA @ 16V |
| Entorno de trabajo temp. | -20℃ ~ +60℃ |
| Salida | micro HDMI(1080P 60fps) / IP (RTSP/UDP 720p/1080p 25fps/30fps) / SDI (1080P 30fps) |
| Almacenamiento local | Tarjeta TF (hasta 512 G, clase 10, FAT32) |
| Formato de almacenamiento de fotos | JPG(1920*1080) |
| Formato de almacenamiento de vídeo | MP4 (1080P 30fps) |
| Lectura de cartas en línea | Lectura SMB / Lectura HTTP |
| Método de control | PWM / TTL / S.BUS/ TCP (versión de salida IP) / UDP(versión de salida IP) |
| Geotagging | Soporta, muestra la hora y las coordenadas GPS en la imagen exif |
| Especificaciones del cardán | |
| Gama mecánica | Pitch/Tilt: -33°~113°, Roll: ±40°, Yaw/Pan: ±300° / ±360°*N (versión de salida IP) |
| Alcance controlable | Pitch/Tilt: -30°~110°, Yaw/Pan: ±290° / ±360°*N (versión con salida IP) |
| Ángulo de vibración | Pitch/Roll: ±0,02°, Yaw:±0,02°. |
| Una tecla para centrar | √ |
| Especificaciones de la cámara EO | |
| Sensor de imágenes | CMOS de 1/3 (exploración progresiva) |
| Calidad de imagen | Full HD 1080 (1920*1080) |
| Píxel efectivo | 4,08MP |
| Zoom óptico del objetivo | 10x, F=3,3~33,0mm, F1,8~3,4 |
| Zoom digital | 16x |
| Distancia mínima del objeto | 10 mm (extremo ancho) a 800 mm (extremo tele) |
| Ángulo de visión horizontal | 58,2°(extremo ancho) ~ 6,9°(extremo tele) |
| Sistema Sync | Interno |
| Relación S/N | más de 50 dB |
| Iluminación mínima | 0,5 lx (1/30s, F1.8, 50%) |
| Gane | Auto / Manual |
| Balance de blancos | ATW1 (Estrecha), ATW2 (Ancha), Una pulsación, manual (B, R),interior,exterior |
| Velocidad de obturación | De 1/1 a 1/10.000 |
| Compensación de contraluz | Sí |
| Control de apertura | 16 pasos |
| OSD | Sí |
| Especificaciones de la cámara termográfica IR | |
| Longitud de enfoque | 24 mm |
| FOV horizontal | 18.2° |
| FOV vertical | 14.6° |
| FOV diagonal | 23.2° |
| Distancia de detección (Hombre: 1,8×0,5 m) | 1000 metros |
| Reconocer distancia (Hombre: 1,8×0,5 m) | 250 metros |
| Distancia verificada (Hombre: 1,8×0,5 m) | 125 metros |
| Distancia de detección (coche: 4,2×1,8 m) | 3067 metros |
| Reconocer la distancia (Coche: 4,2×1,8 m) | 767 metros |
| Distancia verificada (coche: 4,2×1,8 m) | 383 metros |
| Modo de trabajo | Cámara termográfica de onda larga no refrigerada (8μm~14μm) |
| Píxel detector | 640*512 |
| Paso de píxeles | 12μm |
| Método de enfoque | Objetivo de focal fija atérmico |
| Corrección de la emisividad | 0.01~1 |
| NETD | ≤50mK (@25℃) |
| MRTD | ≤650mK (@frecuencia característica) |
| Mejora de la imagen | Ajuste automático del brillo y el contraste de la imagen |
| Paleta de colores | Blanco, rojo hierro, pseudocolor |
| Corrección automática no uniforme | Sí (sin obturador) |
| Zoom digital | 1x ~ 12x |
| Sincronizar la hora correcta | Sí |
| Cámara EO / IR Seguimiento de objetos | |
| Tasa de actualización del píxel de desviación | 50 Hz |
| Retardo de salida del píxel de desviación | 5 ms |
| Contraste mínimo del objeto | 5% |
| SNR | 4 |
| Tamaño mínimo del objeto | 32*32 píxeles |
| Tamaño máximo del objeto | 128*128 píxeles |
| Velocidad de seguimiento | ±48 píxeles/fotograma |
| Tiempo de memoria del objeto | 100 fotogramas (4s) |
| Los valores de la raíz cuadrada media del ruido de impulsos en la posición del objeto | < 0,5 píxel |
| Telémetro láser IR | |
| Gama | 5~1800 metros |
| Resolución | 0.5m |
| Corriente de trabajo: | 80mA (max) |
| Haz de luz | Láser de pulso de 905 nm |
| Ángulo divergente | 3 mrad |
| Frecuencia del impulso láser | 1HZ |
| Potencia | < 1 mW (seguro para los ojos) |
| Modo de alcance | Pulso |
| Localización Resolución | Latitud y longitud del objetivo |
| Ranefinder | Medición de la distancia al objetivo |
| Información sobre el embalaje | |
| N.O. | 692 g (versión Viewport) |
| Producto meas. | 119,4*105,7*168,1 mm / 119,4*105,7*173,8 mm (versión Viewport) |
| Accesorios | 1 dispositivo de cámara cardán, tornillos, cilindros de cobre, bolas de amortiguación, placas de amortiguación, cable TTL / Caja de plástico de alta calidad con almohadilla de espuma |
| G.W. | 2264g |
| Paquete meas. | 300*250*200mm |
| Peso | 1 kg |
|---|
Sé el primero en valorar “Mini Z10TIRM Dual-sensor Object GPS Coordinate Resolving and LRF Gimbal Camera”
Debes acceder para publicar una valoración.
Productos relacionados


Cardanes y carga útil


Cardanes y carga útil


Cardanes y carga útil


Cardanes y carga útil
U30TIR 30x Zoom EO+ IR Cámara Gimbal de 2 ejes con sensor dual y seguimiento de objetos


Cardanes y carga útil
U2 Ultra Ligero Micro Prime LensDual EO Sensores FHD 1080P Seguimiento de Objetos Gimbal Cámara


Cardanes y carga útil
U30T optimizado cardán de 2 ejes para cámara de avión VTOL y carga útil de UAV multirrotor


Cardanes y carga útil


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Valoraciones
No hay valoraciones aún.